ROS2 Humble를 설치해보자!
-
먼저 터미널을 실행해준다.
-
다음 두 명령어를 실행함으로써 Ubuntu Universe Repository를 활성화해준다.
# software-properties-common(소프트웨어 저장소를 관리하는 도구) 설치
sudo apt install software-properties-common
# universe(우분투의 저장소 이름) 리포지토리를 APT 리포지토리 목록에 추가
sudo add-apt-repository universe- apt를 이용하여 ROS2 GPG Key를 추가한다. 이 과정들은 ROS2를 어디서 다운받을지 정하는 일련의 과정이라고 생각하면 된다.
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
- 그 다음에, 소스 리스트에 ROS Repository를 추가해준다. 일종에 저장소가 어디있는지 알려주는 역할을 한다.
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null- 이제 본격적으로 ROS2를 설치할 것이다.
- 먼저 repository를 이전단계에서 설정해줬으므로 repository caches를 업데이트해준다. 그리고 업그레이드도 해준다!
sudo apt update
sudo apt upgrade- 다 되었으면, ros-humble 관련 패키지를 설치해준다. 이 패키지 안에 ros, rviz, demos, tutorial 등등이 들어가있다.
sudo apt install ros-humble-desktop- ROS2로 패키지라는 것을 만들때 필요한 프로그램도 다음 명령어를 실행해 설치한다. 명령어에 있는 ros-dev-tools가 뭔가 ROS로 개발할 때 필요한 툴들을 의미하는 것 같다!
sudo apt install ros-dev-tools(이 밖에도 PCL(PointCloud) 등 설치할 것들이 많기는 한데, 지금 당장은 쓸일이 딱히 없으니까, 추후에 필요할때 설치를 해주는 걸로 하자)
- 그후 ROS2 환경을 터미널에 다음과 같이 불러온다.
source /opt/ros/humble/setup.bash(터미널을 열때마다 위 명령어를 실행하면, ros 관련 명령어를 쓸수가 있게 된다)
- 하지만 매번 터미널을 켤때마다 setup.bash파일을 불러오는게 여간 귀찮은게 아니다. 따라서 .bashrc파일을 열어 파일 맨 하단에 위 명령어를 붙여넣으면 된다.
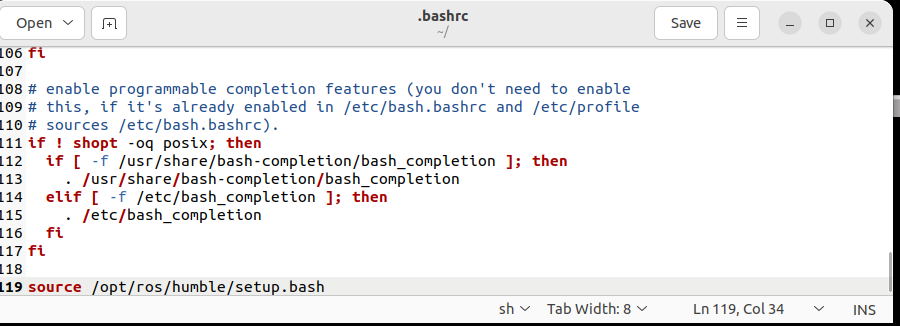
- 위와 같이 명령어를 붙여넣고 저장후 파일 편집창을 나온다.
- 그럼 터미널이 열릴때, .bashrc파일 내용이 자동으로 실행되면서 ROS2 환경이 자동으로 세팅된다.
이제 ROS2가 제대로 설치가 되었는지 확인해보자!
ROS2가 실행되는지 테스트해보자!
-
지금부터는 ROS2 데모를 실행해볼려고 한다.
-
talker라는 노드에서 listener라는 노드로 토픽이 전달되는 것을 확인해보려고 한다.
-
일단, 터미널을 하나 열어주고
# 토픽을 쏴주는 talker라는 노드를 실행한다.
ros2 run demo_nodes_cpp talker- 그 다음, 다른 터미널을 하나 더 열어주고
# 토픽을 받아오는 listener라는 노드를 실행한다.
ros2 run demo_nodes_py listener- ROS2가 정상 설치됐다면 위의 명령어 실행 시 "I heard"라고 터미널에 메세지가 출력될 것이다.

- 그러면 ROS2가 정상적으로 설치가 된 것이다.

안녕하세요, AUTONOMOUS PCC 대표이자 APLabs 연구소의 Jack입니다. 풀스택 웹 개발을 넘어, 이제는 풀스택 모빌리티 개발자를 꿈꾸며 나아가고 있습니다.