- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 액션 서버 만들기
1. 코드 생성
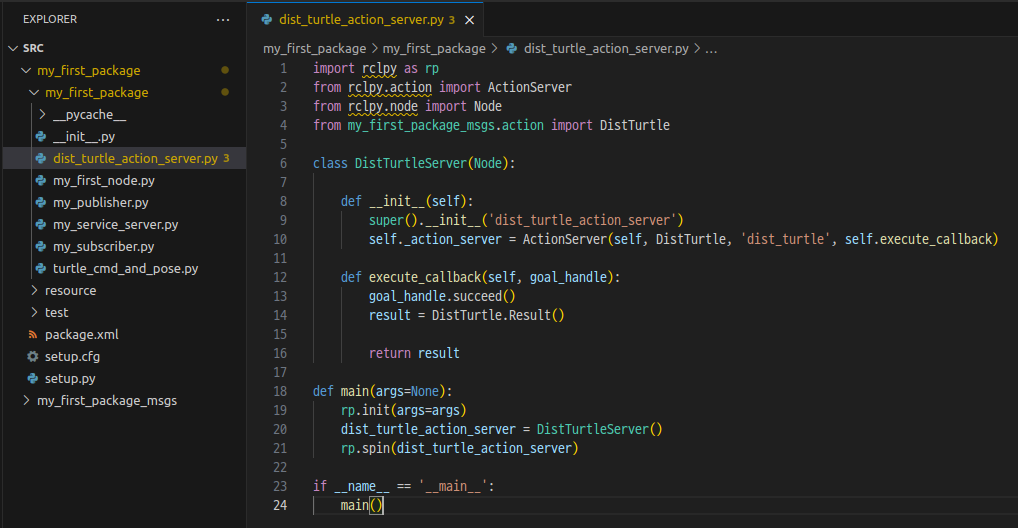
- my_first_package에 dist_turtle_action_server.py 만들기
- rclpy에서 ActionServer와 Node 부르기
- 직접 만든 액션 정의 DistTurtle 가져오기
- DistTurtleServer 액션 서버 만들고 클래스 노드 상속 받고
- 노드 이름은 dist_turtle_action_server
- ActionServer로 서버 생성
- 액션 서버에 리퀘스트한다면 콜백함수; 성공 알림, 결과
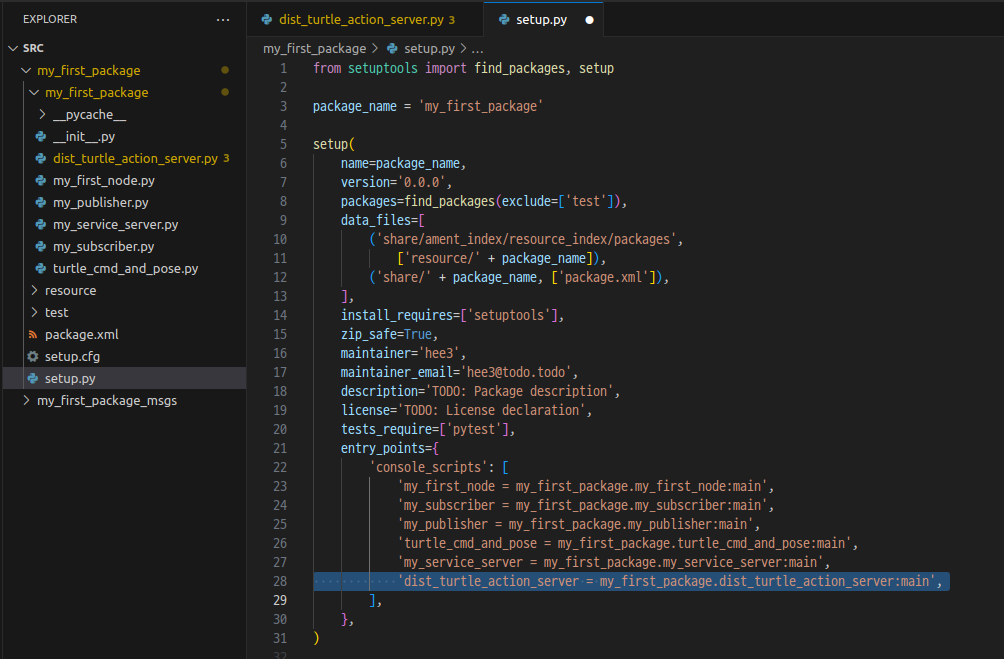
2. setup.py 추가
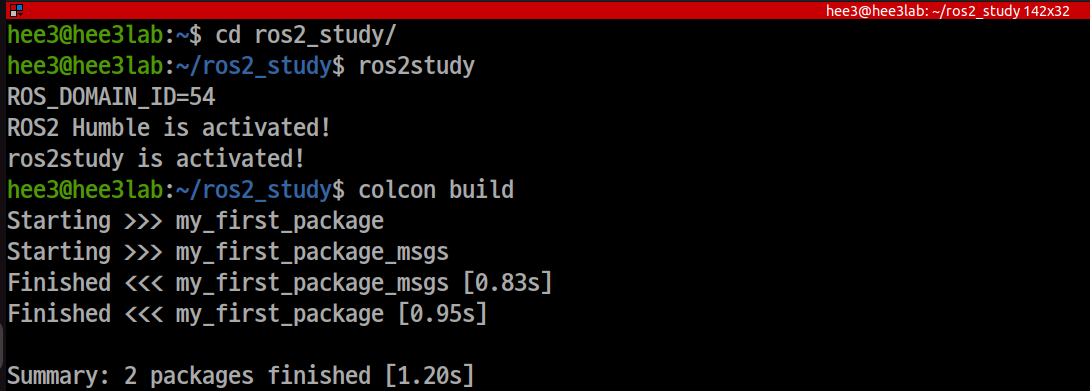
3. 빌드
4. 액션 서버 가동 및 동작 확인
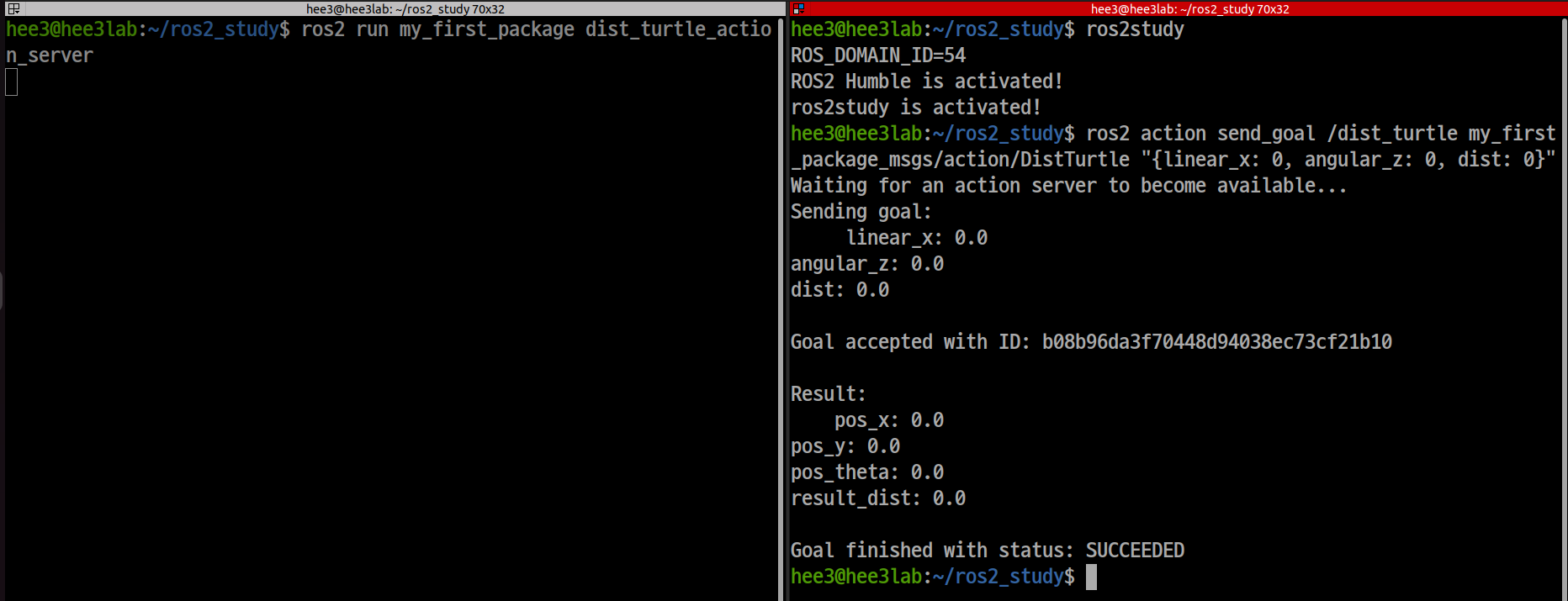
- send_goal로 액션 서버에 요청
- dist_turtle에
- my_first_package_msgs/action/DistTurtle 데이터타입
- 입력 리퀘스트할 데이터 {linear_x: 0, angular_z: 0, dist: 0}

3D 모델러의 개발 도전기