iam_hee3
로그인
iam_hee3
로그인
[ROS2] EP14. 액션 피드백 구현해보기
김희상
·
2024년 8월 12일
팔로우
0
ros2
ROS2
목록 보기
14/17
OS : Ubuntu 22.04
ROS 2 Humble
Gazebo 11
1. 액션 서버 만들기
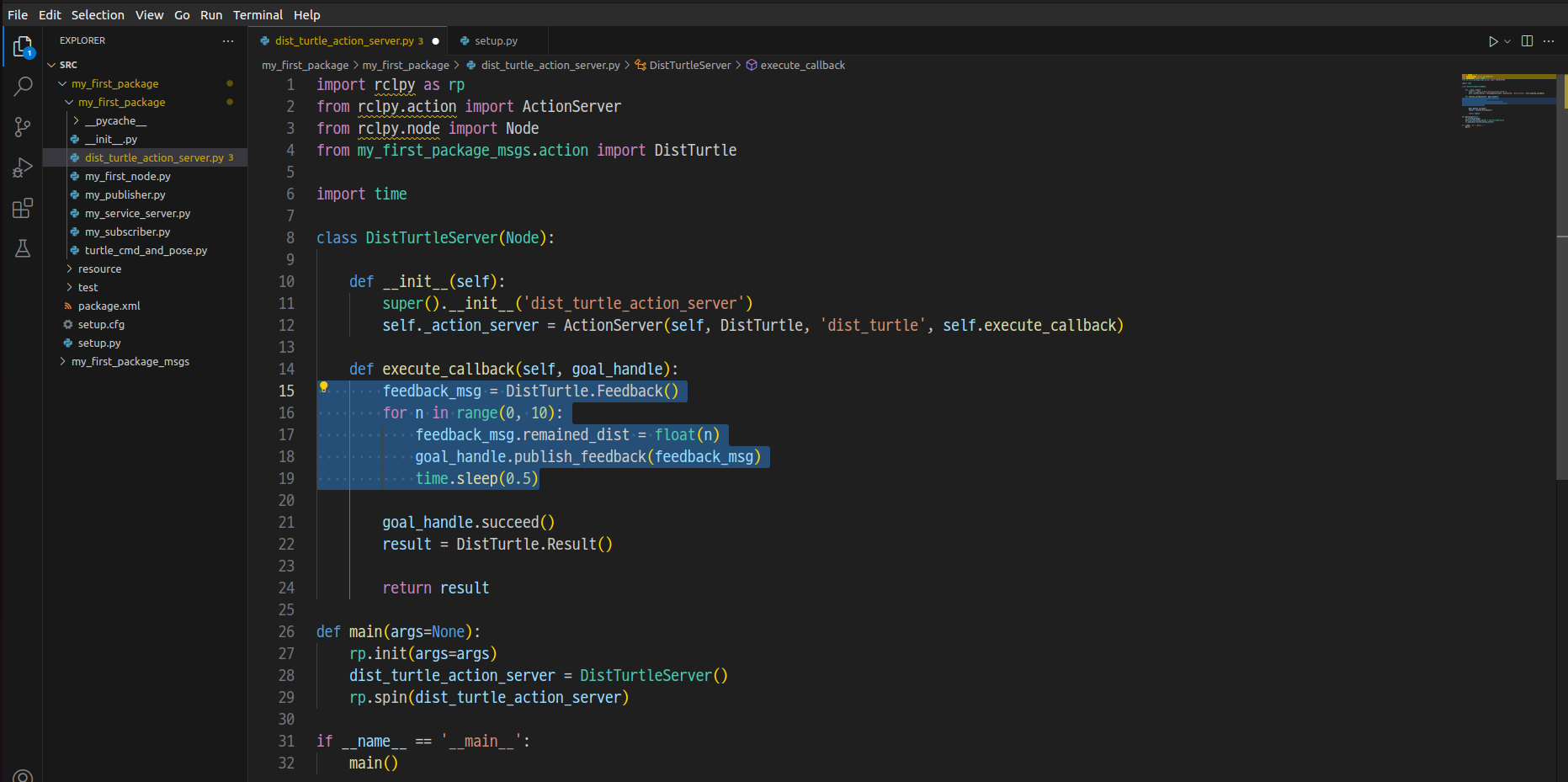
1. 코드 수정
callback함수에 피드백 받도록 수정 (피드백 구조만 확인)
0~9 반복문에서 float형으로 바꾸고 remained_dist에 추가
publish_feedback으로 피드백을 토픽으로 발행
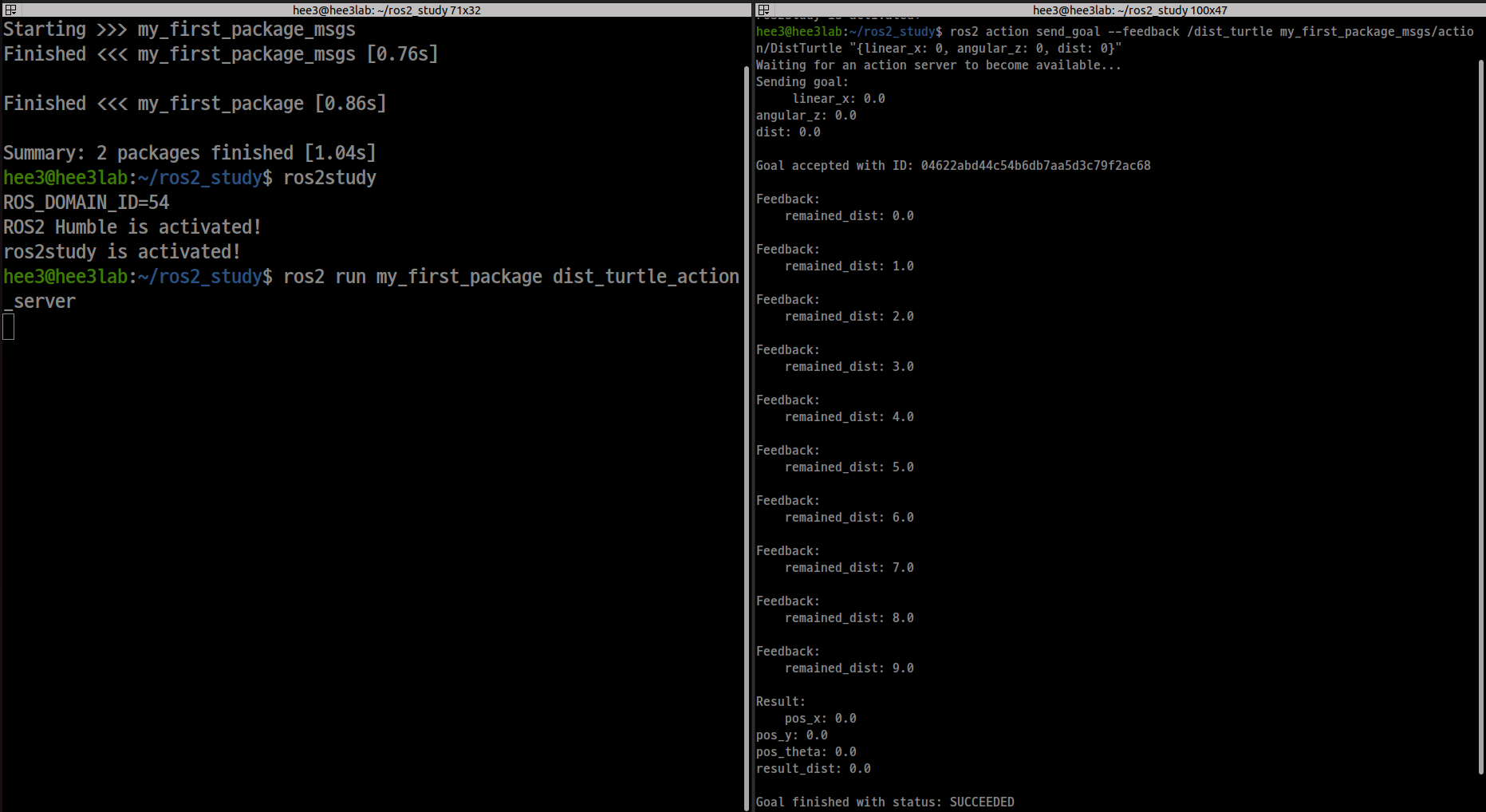
2. 빌드
3. 액션 서버 가동
send_goal 할 때 --feadback 옵션
김희상
3D 모델러의 개발 도전기
팔로우
이전 포스트
[ROS2] EP13. 액션 서버 만들기
다음 포스트
[ROS2] EP15. 멀티 쓰레드 사용해보기
0개의 댓글
댓글 작성