- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
action callback이 돌면 subscriber의 callback이 돌지 않는다.
- 해결 방법으로 멀티쓰레드 사용!!
1. 멀티쓰레드
1. 코드 추가
import rclpy as rp
from rclpy.executors import MultiThreadedExecutor
from rclpy.node import Node
from my_first_package.my_publisher import TurtlesimPublisher
from my_first_package.my_subscriber import TurtlesimSubscriber
def main(args=None):
rp.init(args=args)
pub = TurtlesimPublisher()
sub = TurtlesimSubscriber()
executor = MultiThreadedExecutor()
executor.add_node(pub)
executor.add_node(sub)
try:
executor.spin()
finally:
executor.shutdown()
pub.destroy_node()
sub.destroy_node()
rp.shutdown()
if __name__ == '__main__':
main()- my_first_thread,py 생성
- MultiThreadedExecuter를 rclpy에서 가져오기
- TurtlesimPublisher는 cmd-vel 토픽 발행 → 거북이 회전
- TurtlesimSubscriber는 pose 토픽 구독 → print
- 위의 두 클래스를 my_first_package에서 인풋
- MultiThreadExcutor에 sub과 pub을 add_node 시켜주기
- executor.spin() 실행
2. setup.py
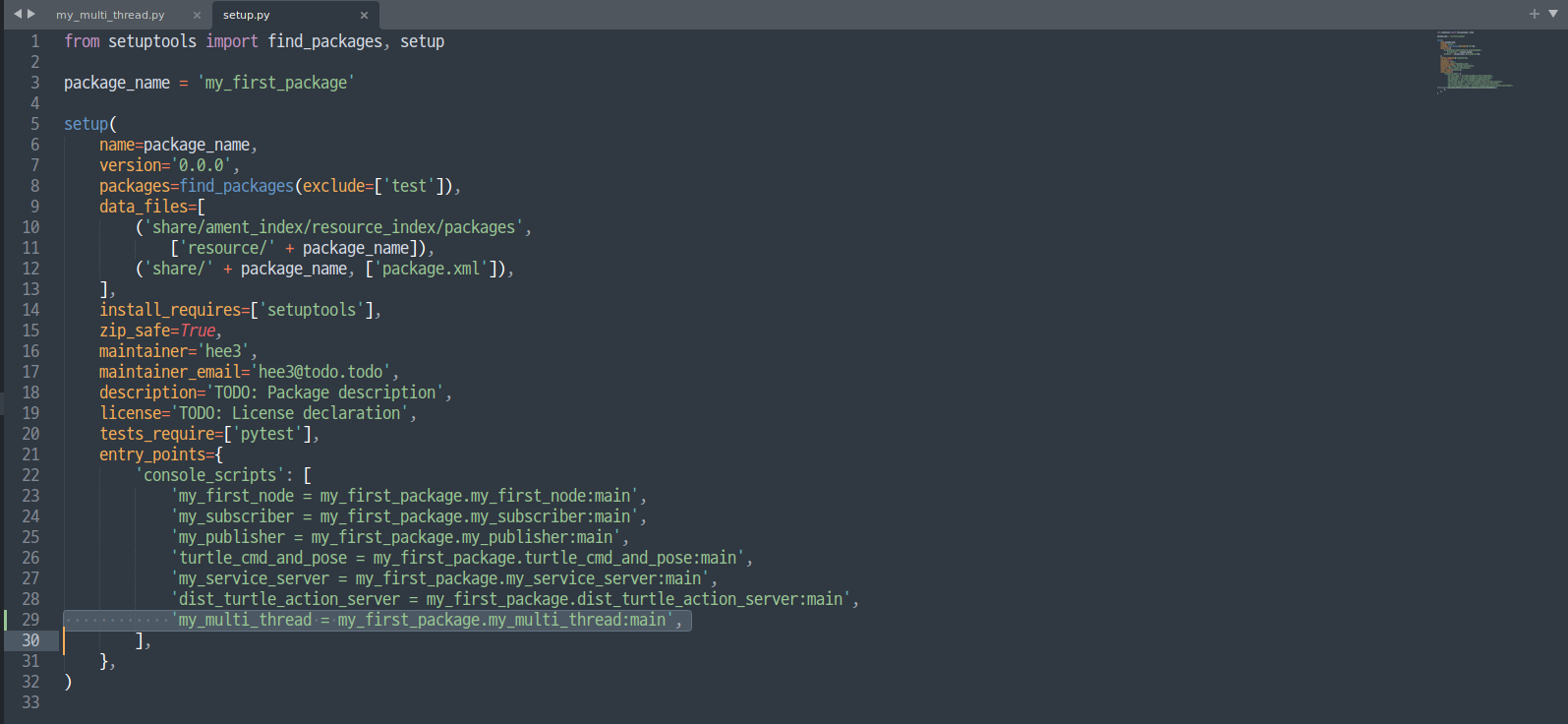
'my_multi_thread = my_first_package.my_multi_thread:main',- entry_points 작업
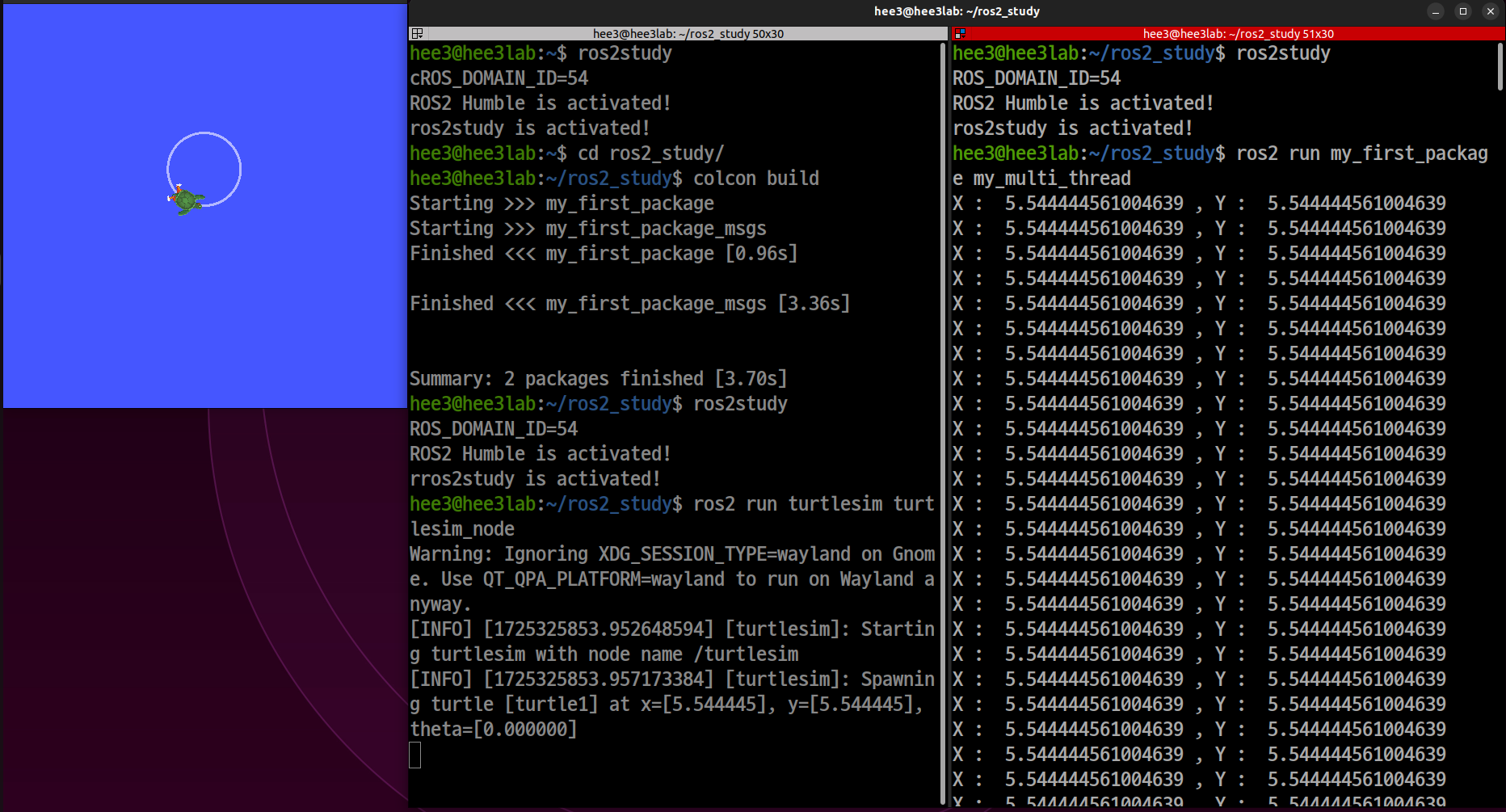
3. 실행
4. rqt_graph
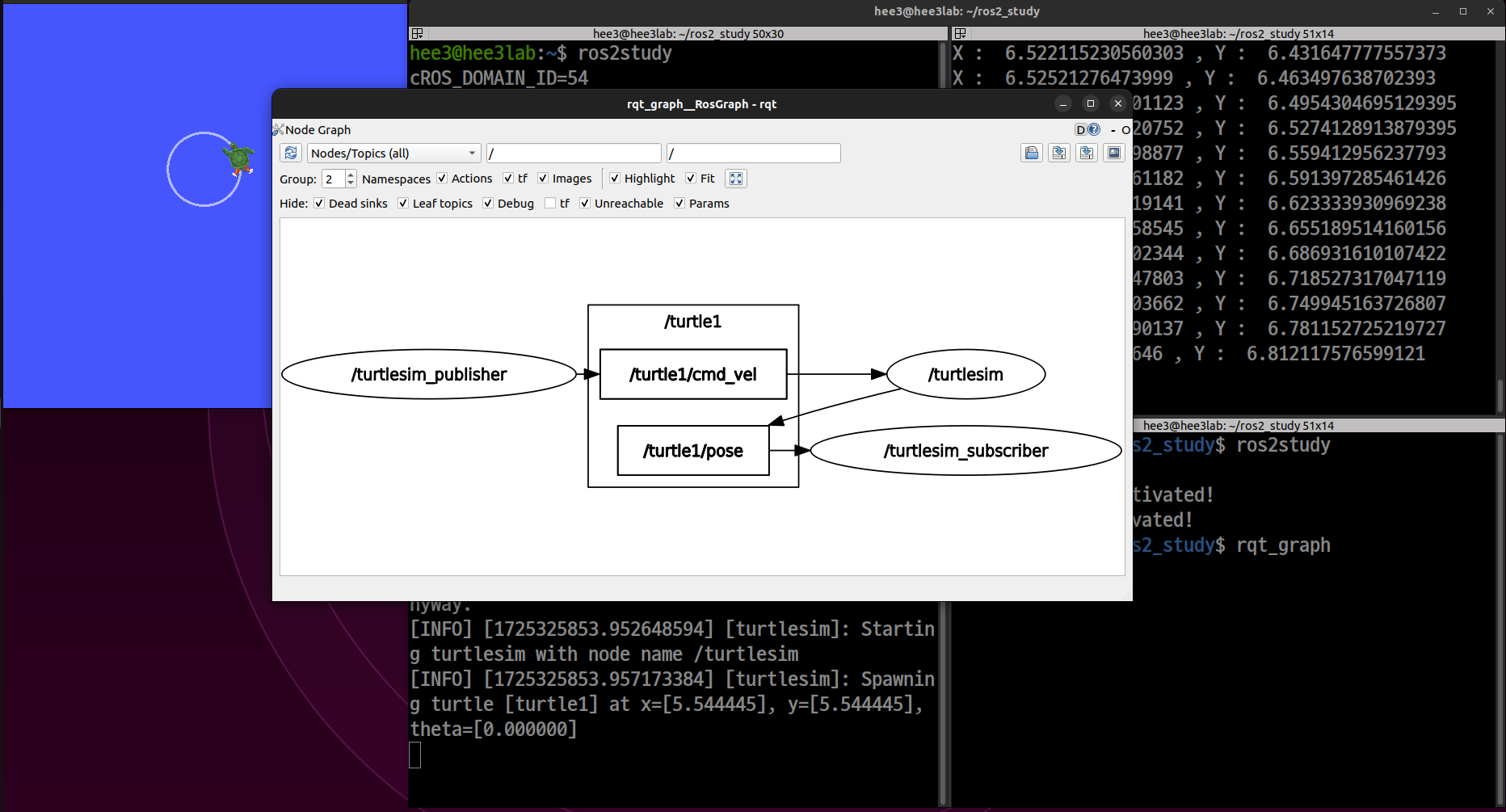
- TurtlesimPublisher와 TurtlesimSubscriber 노드는 MultiThreadedExecuter로 실행
- TurtlesimPublisher가 cmd_vel 토픽 쏘고, turtlesim이 pose토픽 쏘고, pose는 subscriber가 구독할 수 있도록 프린트

3D 모델러의 개발 도전기