- OS : Ubuntu 22.04
- ROS 2 Humble
- Gazebo 11
1. 파라미터 다루기
1. 실험 환경 준비
- bashrc에 지정된 alias 불러오기
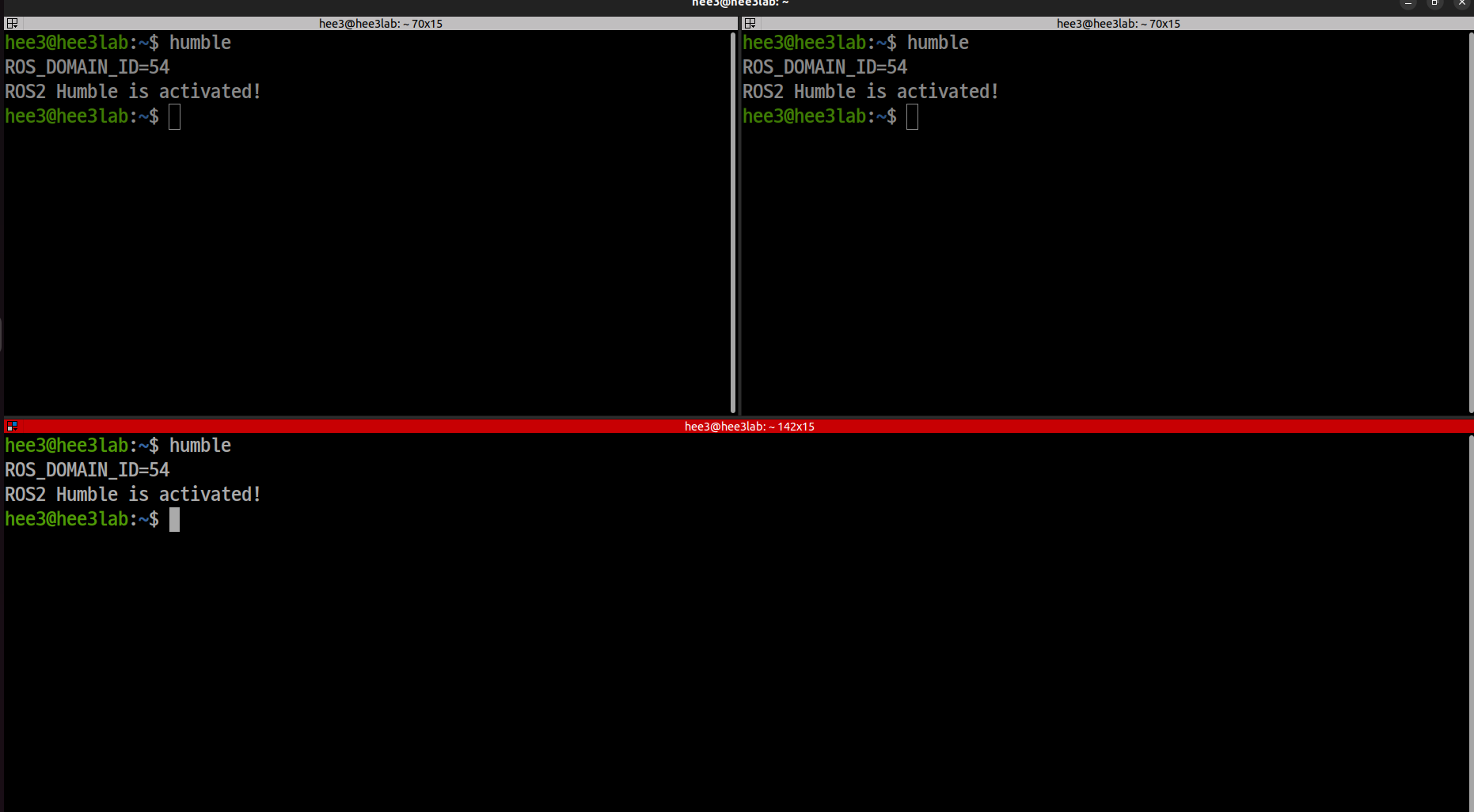
2. 거북이 소환
- 거북이 소환
- turtle_teleop_key로 방향키로 움직일 준비
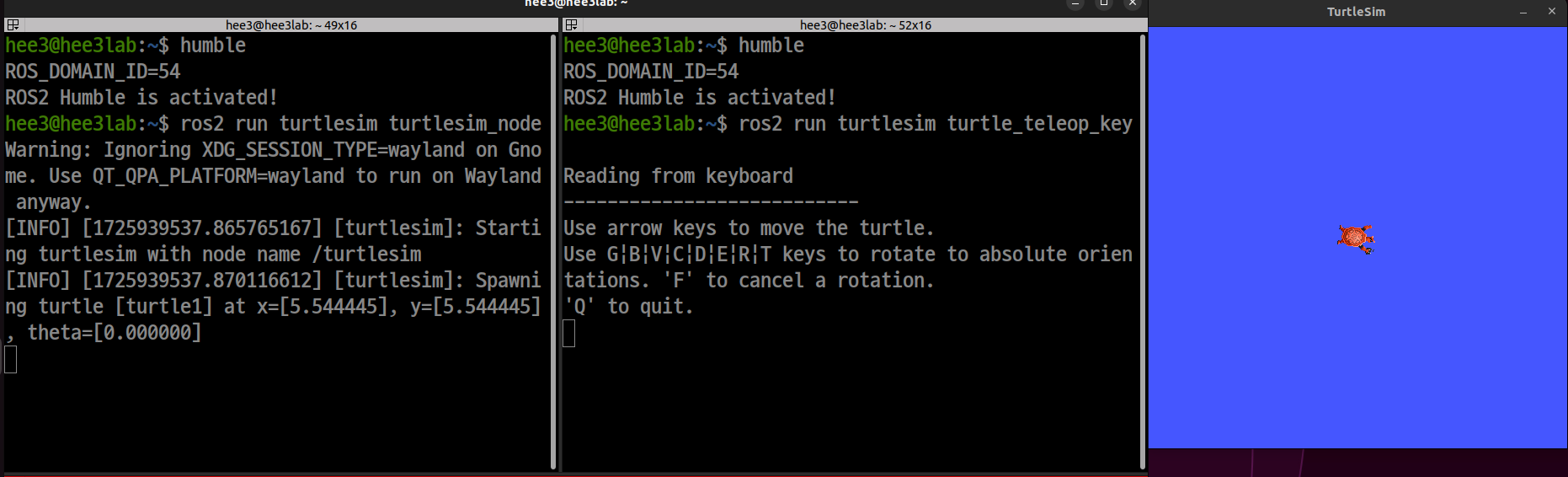
3. 파라미터 리스트
- param list 확인 (파라미터)
4. 파라미터 값 조회
ros2 param get /turtlesim background_g
5. 파라미터 값 변경

5. 폴더 이동

- ros2_study/src/my_first_package 경로에서 params 폴더 생성
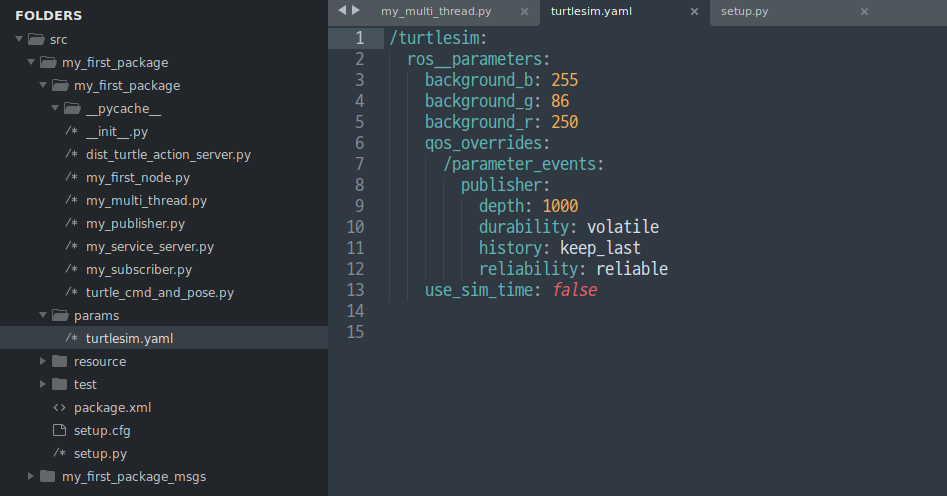
6. param dump

- dump한 결과를 현재 폴더에 turtlesim.yaml으로 저장
7. dump한 param 읽기
8. 일부 변경
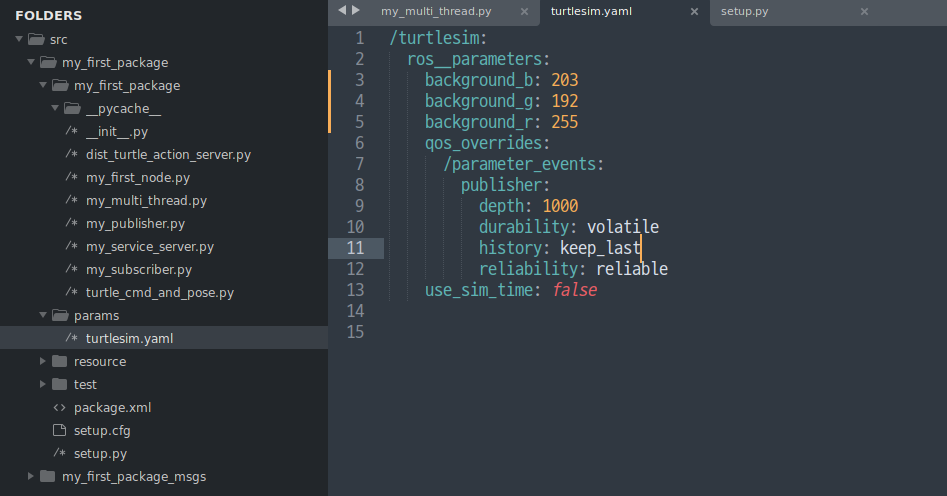
- bgr값 임의 변경
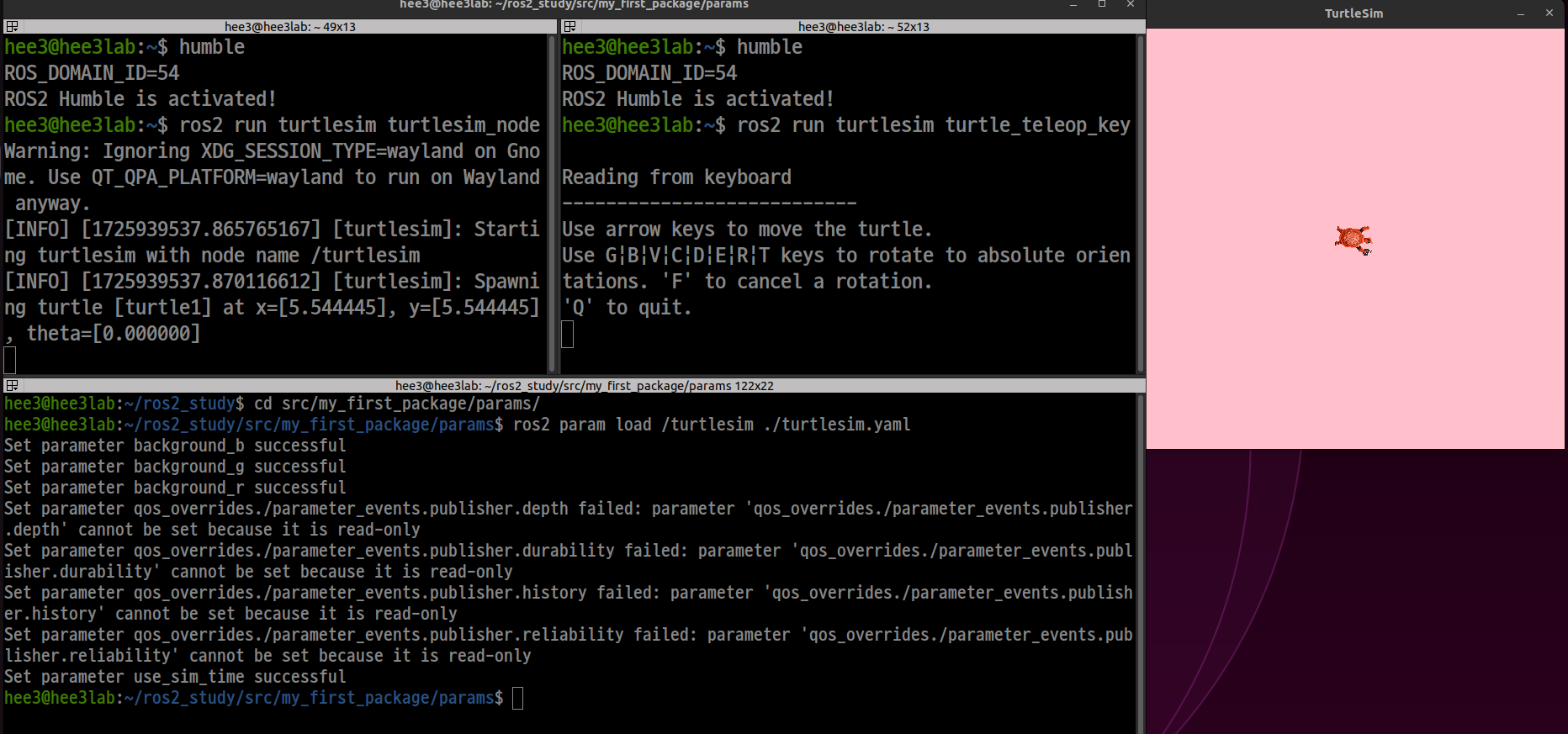
9. param load
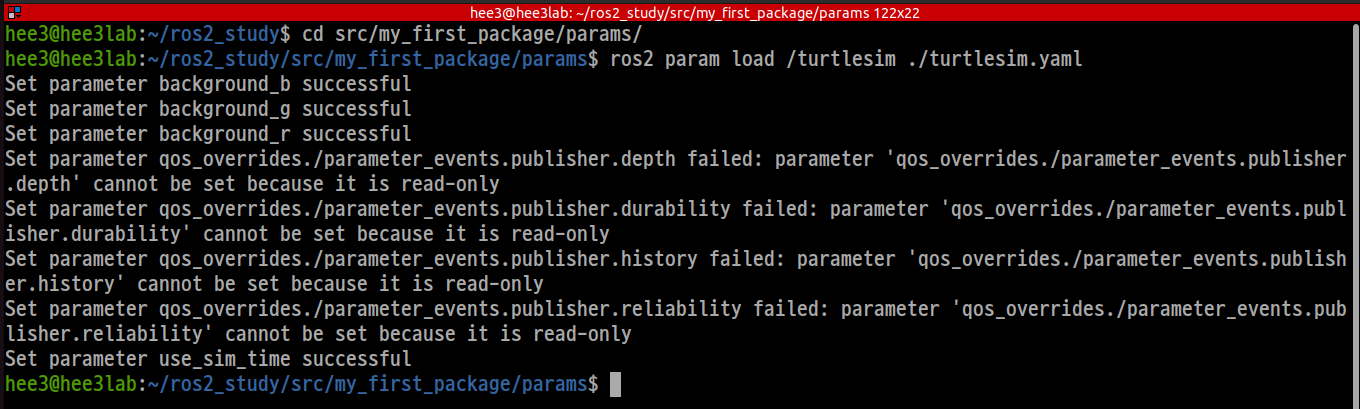
- 실행 위치 주의
- ros2 param load 명령어로, turtlesim이라는 이름으로 현재 폴더에서 turtlesim.yaml 불러오기
10. 최종 확인
- 변경된 색상 확인

3D 모델러의 개발 도전기