Chapter 2 - Satellites and sensors
On the Ground, In the Air, In Space
sensor가 지표면으로부터 반사되거나 방출된 에너지를 기록하고 수집하기 위해선 target이나 지표면에서 제거된 안정적인 플랫폼에 위치해 있어야한다. Remote sensing을 위한 플랫폼은 땅 위에 있을 수도 있고 항공기나 열기구 혹은 지구 대기 밖에 있는 우주선이나 인공위성 등이 될 수 있다.
Ground-based sensor는 지표면의 대한 자세한 정보를 기록해서 aircraft나 인공위성으로부터 수집된 정보와 비교하기 위한 용도로 사용된다. 경우에 따라선 다른 센서에 의해 이미지화된 target을 더 잘 파악할 수 있다. 센서는 ladder(사다리), scaffolding(비계->공사장에 있는 임시 뼈대), tall building, cherry-picker(사람 올리는 공사장 기계), crane 등에 위치할 수 있다. Aerial platform(항공 플랫폼)은 헬리콥터도 종종 사용되긴 하지만 주로 안정적인 날개를 가진 aircraft를 말한다. 항공기는 매우 자세한 이미지를 얻는데 종종 사용되고 사실상 어느 위치나 시간대에서도 지구 표면의 정보를 얻는 것을 가능하게 한다.
우주에선 remote sensing은 가끔 우주왕복선에서도 수행되고 더 일반적으론 보통의 경우 인공위성에서 수행된다. Satellites는 다른 물체 주변을 도는 오브젝트를 말하고 Remote sensing의 경우엔 Earth가 된다. 예를 들어 달은 natural satellite이지만 man-made satellite는 remort sensing, communication, telemetry(원격측정) 목적으로 발사된 것들을 포함한다.
Satellite Characteristics: Orbits and Swaths
ground-based나 aircraft platform이 종종 사용되지만 주로 인공위성이 오늘날 사용되는 이미지의 많은 부분을 제공하고 있다. 인공위성은 특히 지구표면 원격 탐사를 위한 몇가지 유니크한 특성들을 가지고 있다. 위성이 지나가는 경로를 orbit(궤도)라고 한다.
위성 궤도는 센서의 능력과 목표에 부합해야한다. 궤도 선택은 위성의 고도와 지구의 대한 상대적인 방향과 회전(번역기는 왜 자전이라고하지?)에 따라 다양하다. 매우 높은 고도에서 항상 지구표면의 같은 부분을 보고 있는 위성을 geostationary orbits(정지궤도 위성)라고한다. 이 위성은 약 36000km 고도에 있고 자전속도와 같은 속도로 돌고 있기 때문에 정지해 있는 것처럼 보인다. 이것은 위성이 특정 영역을 계속해서 관찰하고 정보를 수집할 수 있게해준다. 기상이나 communications 위성이 보통 이런 유형이다. 위성이 굉장히 높게 있기 때문에 어떤 정지궤도 날씨 위성은 지구 전체의 반의 기상과 구름 패턴을 모니터링 할 수 있다.
많은 remote sensing platform은 지구의 자전과 연계(conjunction?)되어 북에서 남으로 가는 궤도를 따르도록 디자인되고 이것은 일정 시간에 걸쳐 지구 표면의 대부분을 커버하도록 해준다. 이것을 near-polar orbits(극궤도 위성)이라고 한다. 많은 극궤도 위성은 sun-synchronous한데 이것은 local sum time이라고 불리는 현지시간(constant local time)에 세계의 각 지역을 cover하고 있다. (현지시간으로 항상 일정한 시작에 동일한 지역을 지나고 있다는 얘기이다.) 어떤 위도에서든지 위성이 머리를 지날 때 하늘의 태양의 위치는 같은 season내에서 같을 것이다. 이것은 연속되는 년도 혹은 에서 특정 시즌에 찍히는 이미지가 일관된 조건에서 찍힐 수 있도록 해준다. 이는 서로 다른 조명 조건에 대해 보정할 필요가 없기 때문에 이미지 간의 변화를 모니터링하거나 인접 이미지를 모자이크처리하는데 중요한 요소이다.
오늘날의 대부분 remote sensing satellite platform은 near-polar orbtis이고 이것은 위성이 한쪽으로는 북쪽을 향해서 가고 한쪽은 남쪽을 향해서 간다는 걸 의미한다. 이것을 각각 ascending descending passes라고 한다. 만약 궤도가 sun-synchronous라면 ascending pass는 아마 지구의 그림자 쪽에서 일어나고 desending pass는 햇빛이 비치는 쪽에서 일어날 것이다. 센서는 오직 태양 빛이 비추는 것이 가능한 desending pass 동안에만 반사된 태양에너지를 기록한다. Active sensor나 thermal radiation을 기록하는 passive sensor들은 ascending pass일 때도 기록을 수행한다.
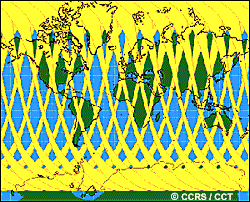
인공위성이 지구주변을 돌 때 센서는 지구표면의 특정 부분을 보게 된다. 그 지역은 이미지화되고 이것을 swath라고 부른다. spaceborne sensor(이게 뭔데)를 위한 swath는 폭이 수십에서 수백 킬로미터로 다양하다. 위성이 지구의 극과 극을 지나 돌기 때문에 지구가 돌지 않는다면 swath의 동쪽과 서쪽 위치는 바뀌지 않는다. 하지만 지구는 서쪽에서 동쪽으로 돌기 때문에(지구를 바깥에서 봤을 때) 위성을 지구에서 봤을 때 (남쪽을 향해 서 있는 상태임) 위성이 서쪽을 향해 가는것처럼 보인다. 이런 명백한 움직임을 통해 satellite swath가 매번 연속적인 pass마다 새로운 지역을 커버하게 해준다.
만약 우리가 위성 궤도에서 아무 랜덤한 pass를 골랐다면 orbit cycle은 인공위성이 똑같은 지점을 다시 지날 때가 될 것이다. 위성에서 지구 방향으로 수직으로 내리 꽂았을 때 닿는 위치를 nadir point라고 하고 이 위치를 2번째로 지날 때가 한 orbit cycle이 끝날 때이다. 위성마다 한 orbital cycle 시간은 다르다. 위성이 orbit cycle을 완료하는데 필요한 시간은 revisit period와는 다른 것이다. 조종가능한 센서를 이용할 경우엔 위성장비는 궤도가 target을 통과하기 전이나 후에 해당 지역을 보는 것이 가능하다 따라서 revisit time을 orbit cycle보다 줄일 수 있다. revisit peroid는 특히 빈번한 이미지 촬영이 요구될 때 다수의 모니터링 application에 중요한 고려사항이다. (예를 들어 기름유출이나 홍수의 확산범위를 모니터링하기 위해) 위도가 높은 극지방 쪽은 적도 지방쪽보다 더 많이 촬영이 되는데 이는 극지방으로 갈수록 orbit paths가 점점더 가까워져서 인접한 swaths가 더 많이 중첩되기 때문이다.
TMI
날씨예보에서 보는 대부분의 이미지는 모두 정지궤도 위성에서 오는 사진이라고 한다. 정지궤도 위성이 대륙 스케일로 날씨와 구름 패턴을 볼 수 있게 해주기 때문이다. 기상학자들은 이런 이미지들을 보고 어떤 날씨 패턴이 일어나고 있는지를 파악한다.
정지궤도 위성의 높은 시간해상도를 통해 기상학자들은 매일 여러개의 이미지를 얻고 패턴들을 더 면밀히 모니터링 한다.
인공위성들은 가끔 궤도가 수정될 필요가 있다. 그 이유는 atmospheric drag(대기저항)때문인데 이것은 위성이 우주에 있어도 지구 대기에 약하지만 지속적으로 영향을 받는 것을 말한다. 그리고 궤도 위에서 어떤 힘이 작용해서 위성의 궤도를 초기 궤도에서 벗어나게 하는 경우도 있다. 계획돈 궤도를 계속 유지하기 위해서 지상에 있는 컨트롤 센터는 올바른 궤도에 위성을 다시 위치시키는 명령들을 내린다. 대부분의 위성들과 그 센서들은 몇 년에서 수년정도 유한한 수명을 가지고 있고 센서들은 제대로 작동하지 않거나 극심한 궤도이탈로 인해 더 이상 써먹을 수 없는 상태가 된다.
문제 2번은 무슨 소린지 잘 모르겠다. 일단 질문하고 답변만 여기에 적어 놓겠다.
As a satellite in a near-polar sun-synchronous orbit revolves around the Earth, the satellite crosses the equator at approximately the same local sun time every day. Because of the orbital velocity, all other points on the globe are passed either slightly before or after this time. For a sensor in the visible portion of the spectrum, what would be the advantages and disadvantages of crossing times (local sun time) a) in the early morning, b) around noon, and c) in the mid afternoon?
Answer
An early morning crossing time would have the sun at a very low angle in the sky and would be good for emphasizing topographic effects but would result in a lot of shadow in areas of high relief. A crossing time around noon would have the sun at its highest point in the sky and would provide the maximum and most uniform illumination conditions. This would be useful for surfaces of low reflectance but might cause saturation of the sensor over high reflectance surfaces, such as ice. Also, under such illumination,'specular reflection' from smooth surfaces may be a problem for interpreters. Inthe mid afternoon, the illumination conditions would be more moderate. However, a phenomenon called solar heating (due to the sun heating the surface), which causes difficulties for recording reflected energy, will be near maximum at this time of day. In order to minimize between these effects, most satellites which image in the visible, reflected, and emitted infrared regions use crossing times around mid-morning as a compromise.
