[아두이노] 세그웨이 밸런싱로봇
1.[Arduino] SBOT1 아두이노 세그웨이 밸런싱로봇 제작(Feat. MPU6050, PID제어) - (1)
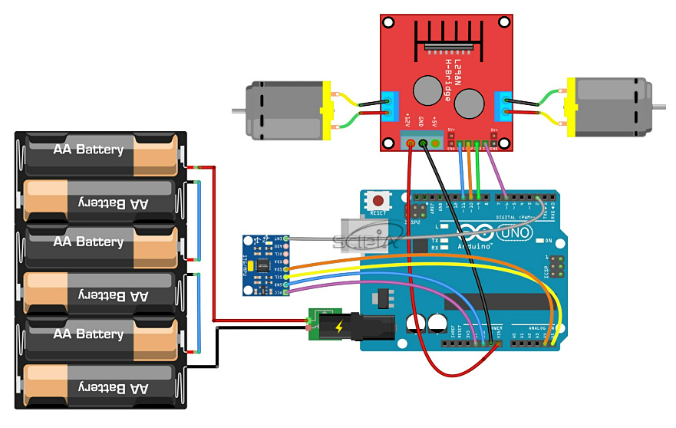
http://scipia.co.kr/cms/blog/227이 키트를 조립하기 전, 공부를 하려 합니다.(해당 포스팅의 모든 출처는 싸이피아 임을 명시합니다.)무엇을 만들려는 것인가?두 바퀴로 균형을 유지하여 넘어지지 않는 로봇즉, "Self-Balacing R
2.[Arduino] SBOT1 아두이노 세그웨이 밸런싱로봇 제작(Feat. MPU6050, PID제어) - (2)
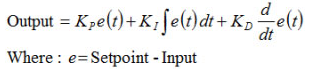
http://scipia.co.kr/cms/blog/227이 키트를 조립하기 전, 공부를 하려 합니다.(해당 포스팅의 모든 출처는 싸이피아 임을 명시합니다.)PID 제어와 관련된 알고리즘PID는 Proportional(비례), Integral(적분), Deri
3.[Arduino] SBOT1 아두이노 세그웨이 밸런싱로봇 제작(Feat. MPU6050, PID제어) - (3) - 알고리즘 공부 (1)

이번 포스팅은 밸런싱 로봇에 쓰이는 알고리즘에 대해 공부해본 내용을 담아보려고 합니다. 제가 현재 공부를 해야 하는 알고리즘은 "밸런싱"에 관한 알고리즘으로, 컴학도인 저에게 많은 도움이 되었으면 좋겠습니다. 시작하기 전, 저는 현재 백엔드 개발을 JAVA와 Sp
4.[Arduino] 아두이노 고군분투 (1)
아두이노를 공부하면서 겪은 고군분투의 흔적을 남기려고 합니다. 정말 기초적인 문제부터 시작을 하겠습니다. 아두이노 보드 설정 >Compilation error: Missing FQBN (Fully Qualified Board Name) 문제 : 이 문제는 보드
5.[Arduino] 아두이노 고군분투 (2)
http://www.iamamaker.kr/ko/tutorials/arduino/%EC%95%84%EB%91%90%EC%9D%B4%EB%85%B8-%EB%A0%88%ED%8D%BC%EB%9F%B0%EC%8A%A4-serial-begin-%ED%95%A8%EC%
6.[Arduino] 교수님 피드백
교수님께서 피드백을 주셨습니다.아두이노 키트를 통해서 해야하는 것확인이걸로 뭘 하려고 하지 말고 이정도까지 제어가 되는 구나..를 확인하라고 하셨습니다.또한, 기존의 코드가 너무 쓸데없이 복잡하다고 하여 (MIT 눈감아,,)제가 간략하게 다시 짜라고 하셨습니다.
7.[Arduino] 코드 수정해보기
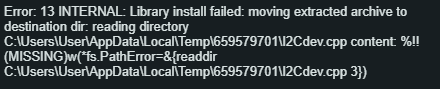
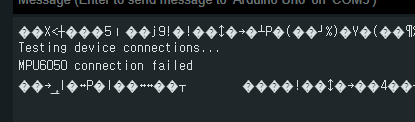
오늘은 필요한 코드만 모아서 수정해보았습니다.Error Handler 작업은 해주지 않았습니다.솔직히 어떤 에러가 발생할지 예측이 안가는 상태에서 그거까지 하는건 오버이기 때문이죠.헤더파일이 정말 정말 많은데 이런식으로 필요한거만 뽑아내서 새로 작성해보니 별로 걸리진