UNSEEN
1.[UNSEEN프로젝트][언리얼] 주제 선정 과정
2024년 2월에 스마일게이트에서 진행하는 UNSEEN이라는 프로그램에 합격해서 2024년 6월 현재까지 개인 프로젝트를 진행해 왔습니다. 이 프로젝트를 마무리하면서 어떤 과정을 거쳤고 개발결과가 어떻게 되는지 여러 포스팅에 걸쳐서 정리해보고자 합니다. 먼저 주제선정과
2.[UNSEEN프로젝트][언리얼] 자료조사
지난 포스팅에서는 NavMesh기술로 구현할 수 없는 3D 공간상에서의 네비게이션을 주제로 선정하는 과정을 다뤘습니다. 이번 포스팅에서는 그렇다면 어떻게 3D 공간상의 네비게이션을 구현할지에 대한 조사결과를 작성하도록 하겠습니다. 구글링 먼저 구글링을 통해서 어떻게
3.[UNSEEN프로젝트][언리얼] CPathFinding 플러그인 분석과 개조 아이디어
지난 포스팅에서는 공간을 Voxel 구조로 분할하면 3D 길찾기가 가능하다는 사실을 조사하고 이미 개발된 언리얼 플러그인을 찾아보는 이야기를 다뤘습니다.이번 포스팅에서는 해당 언리얼 플러그인을 제 프로젝트에 추가하고 체험해보는 과정과 새로운 주제방향성에 관한 이야기를
4.[UNSEEN프로젝트][언리얼] 각 Voxel에 데이터 추가
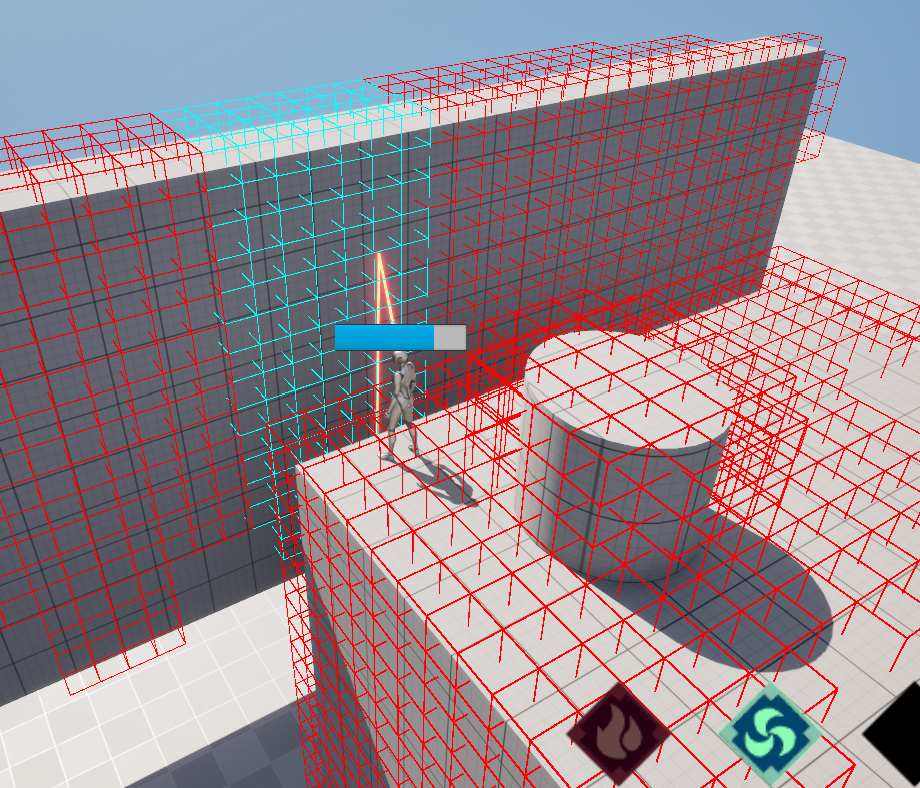
지난 포스팅에서는 최적의 길찾기라는 새로운 주제를 선정하게 된 내용을 다뤘습니다. 이번 포스팅에서는 주제를 달성하기 위해 각 Voxel에 데이터를 추가하게된 과정과 결과에 대해서 적어보겠습니다.CPathFinding 플러그인에서는 특정 복셀의 Volume상에서의 x그리
5.[UNSEEN프로젝트][언리얼] 수정된 A* 알고리즘
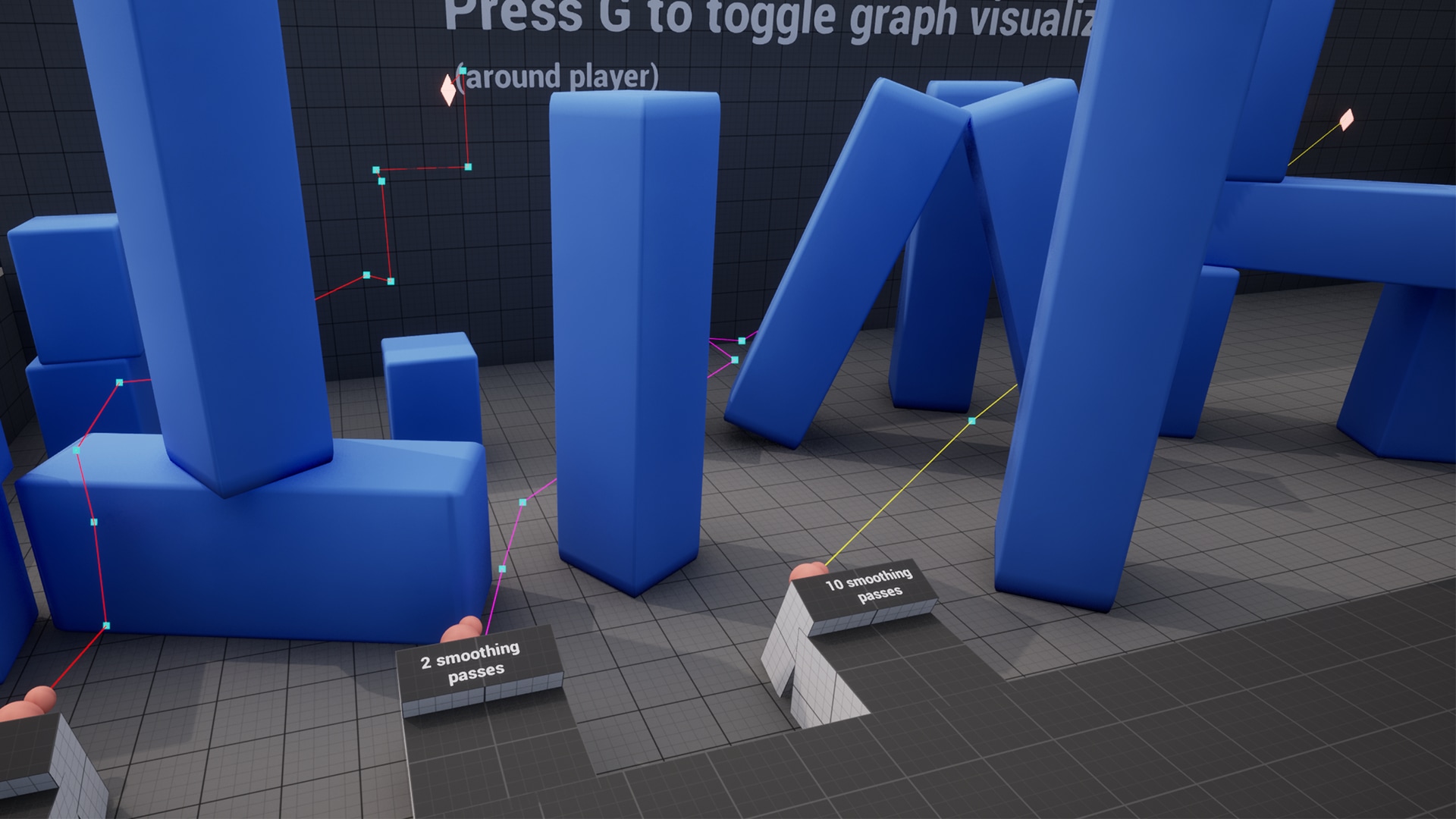
지난 포스팅에서는 글라이딩과 벽타기가 포함된 3D 길찾기를 구현하기 위해서 생성되는 Voxel에 벽영역인지 땅영역인지에 대한 데이터를 추가하는 방법에 관해서 다뤘습니다. 이번 포스팅에서는 이렇게 추가한 데이터를 기반으로 최적의 경로를 계산하도록 A\* 알고리즘을 수정한
6.[UNSEEN프로젝트][언리얼] Voxel Baking구현

지난 포스팅에서는 수정된 A\*알고리즘을 이용해서 글라이딩, 벽타기 상황이 고려된 길안내를 구현하는 과정을 다뤘습니다. 이번 포스티에서는 해당 알고리즘을 위해서 생성되는 Voxel의 최적화 문제와 해결과정에 대해서 다뤄보도록 하겠습니다.CPathFinding이라는 플러