드디어 최종 프로젝트를 시작했다.
1달 남짓한 시간만 주어져서 빡빡하기 하겠지만, 저번 기수분들의 프로젝트 예시가 남아있어서 맨땅에 헤딩하는 것보단 수월할 거 같다.
일단 중요하지 않은 얘기는 건너뛰고, 오늘부터 이번 프로젝트의 진행과정과 배운 점을 작성하여 블로그에 기록해두려고 한다. 애초에 그거 하려고 블로그 시작했으니까.
0. 개요
0-0. 개요 속의 개요
△ 작년 기수분들 프로젝트 영상
작년 프로젝트를 수행하신 분들은 6축 로봇과 여러 기계 구동 장치 등을 활용하여 양품과 불량품을 검사 & 적재하는 공정을 진행하셨다고 한다.
보다보면 단순히 물리적인 공정을 구현한 것뿐만이 아닌 시뮬레이션, 필요한 부품 설계, 비전 검사에 대한 내용도 나온다. 그래서 우리 조도 속은 물론이고 겉보기에도 그럴듯한 공정을 만들어보자고 해서 반도체 공정에 대한 이야기가 나오게 되었다.

△ 반도체 8대 공정
위 그림은 반도체가 원자재로부터 제품이 되기까지의 8가지 공정을 표현한 그림이다.
물론 우리는 실제 반도체처럼 나노미터 단위의 가공은 커녕 로봇 수의 한계로 한 조당 2가지 공정만 구현할 수 있으니 가능한 부분만 최대한 따라해보기로 했다.
그래서 우리 조는 길게 고민하진 않고 웨이퍼 공정과 포토 공정을 선정했다.
길게 고민 안했다고 가볍게 골랐던 건 아닌데 우리가 배운 기술을 모두 활용하며, 시각적으로 직관적인 공정을 고르는 것이 목표였기 때문이다.
한마디로 시연할 때에 화려하고 자랑하기 좋은 공정을 골랐다.
0-1. 웨이퍼 공정

△ 웨이퍼 가공 세부 공정 (왼쪽) / 웨이퍼 연마기 (오른쪽)
웨이퍼 공정은 이런 식으로 총 3단계로 구성되어있다. 근데 우리는 하키퍽처럼 생긴 가짜 웨이퍼를 미리 만들어서 사용하기 때문에 표면 연마만 구현하기로 했다.
표면 연마는 총 4가지 단계로 이루어진다. 단계는 웨이퍼 배치 > 연마기 작동 > 비전 검사 > 불량품 폐기로 이루지는데 6축 로봇, AI, 서브모터, 공압, PLC제어를 모두 사용하는 가장 핵심적인 공정이라고 봐도 될 것 같다. 초반부터 좀 어렵겠지만 매도 일찍 맞는 게 낫다고 첫 공정이 핵심 공정인게 오히려 속편할 지도 모르겠다.
이 단계에서 생길 문제점에 대해 추측하자면, 아무래도 동기화된 신호 교환이 중요해지지 않을까 싶다. 이 공정에서는 자재창고에서 바로 연마기에 배치시키는 작업 외에도 여러 가지 작업을 순차적으로 수행해야한다.
그렇기에 순서가 꼬이면 연마기와 6축 로봇이 서로 부딪히거나 고장날 가능성이 있어 정확한 PLC 제어가 요구되게 된다. 거기다 여러 기계와 동시에 신호를 교환해야해서 다수의 데이터선과 전선 정리도 필요해진다.
후반 작업이지만 OpenCV도 학습시켜 AI 기반 비전검사도 수행해야하기 때문에 초반에 꽤 고생을 하게 될 거 같다.
0-2. 포토 공정
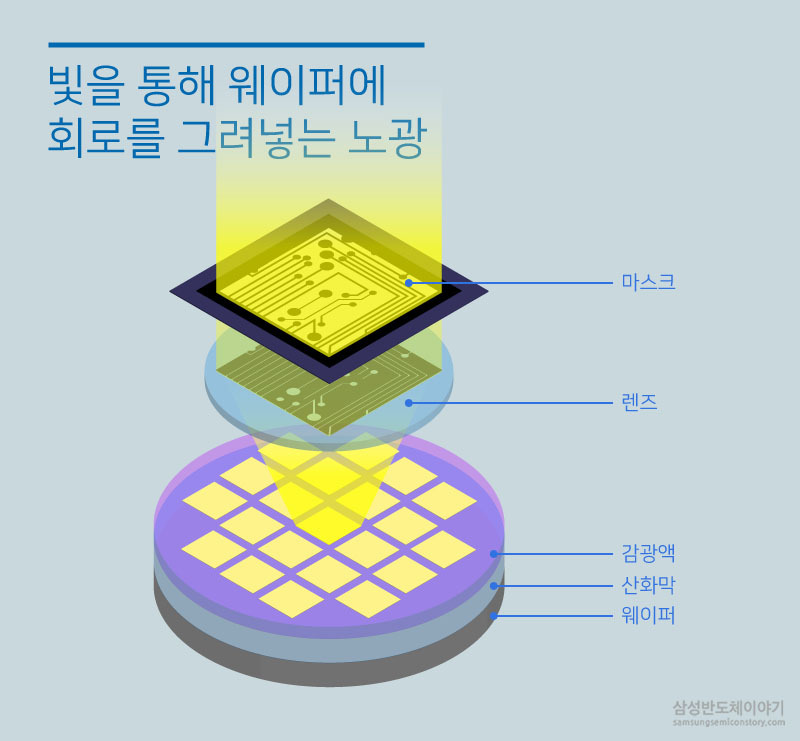
사실 포토 공정은 AI가 센서로만 바뀌었을뿐, 큰 차이는 없다.
굳이 바뀐 게 있다면 감광액 분사기, 노광기, 후공정용 창고에의 운송을 1개의 로봇이 작업해야해서 로봇이 좀 바쁘다는 게 차이점이다.
그래서 이 공정은 동선의 최적화와 센서 활용이 가장 중요한 쟁점이 될 것으로 보인다. 가능하다면 색깔을 구별할 수 있는 포토 센서를 통해 틀린 색깔의 웨이퍼를 걸러내는 공정도 추가할 생각이기에 센서 활용도 쟁점으로 삼았다.
1. 설계구조
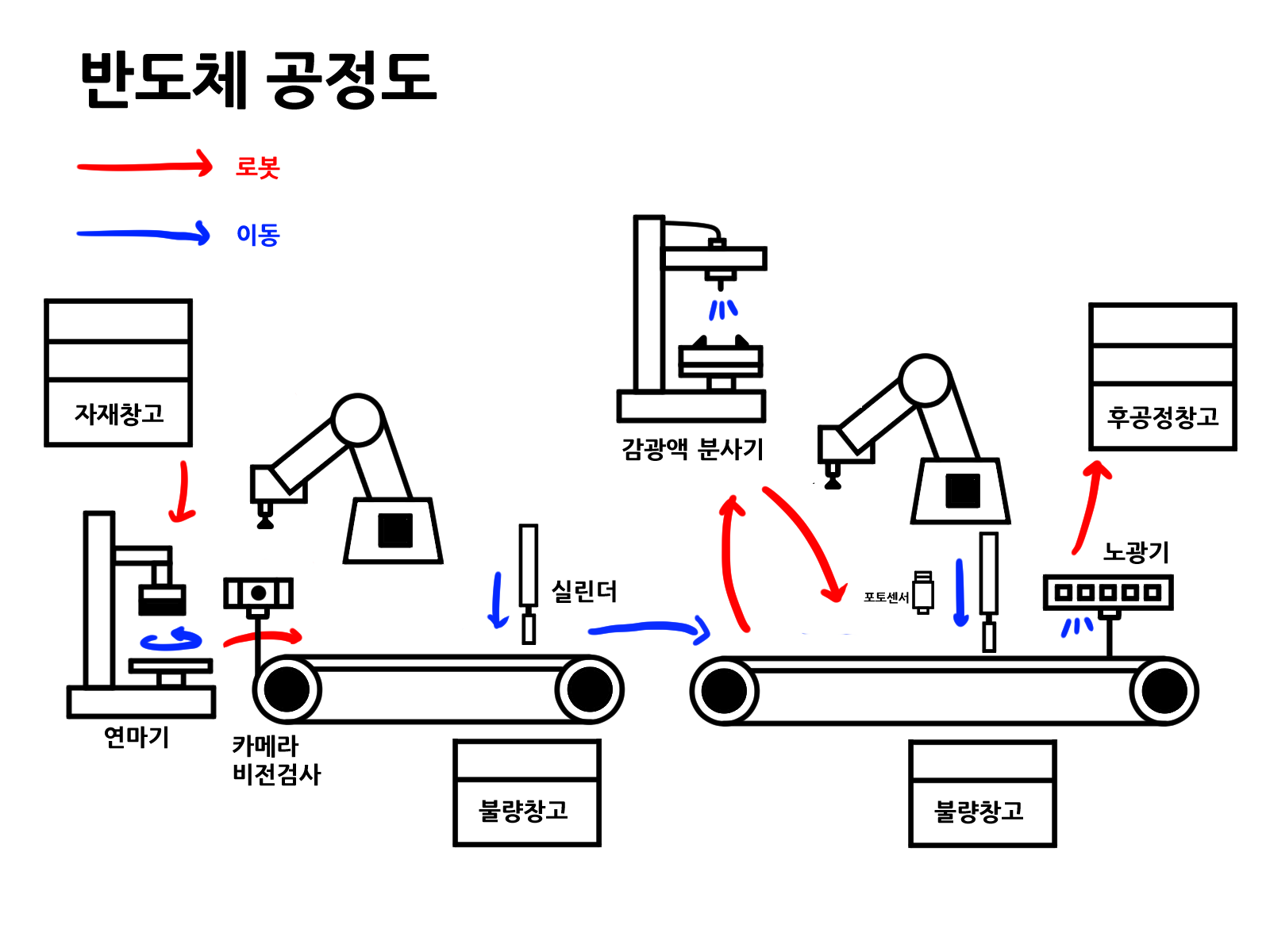
위의 설명을 바탕으로 최대한 이해가 되도록 그림을 그려봤다만.......
시간이 오래 걸린 것치곤 그닥 직관적인 그림은 아니다. 솔직히 못 그렸다.
참고용으로만 봐주길 바란다.
순서상으로 자재창고 > 연마기 > 비전검사(불량 검출) > 감광액 분사기 > 포토센서 검사(불량 검출) > 노광기 > 후공정 창고순으로 진행된다는 것만 이해해주면 될 것 같다.
우리가 구현하지 않은 후반의 공정은 다른 조가 구현해야하기에 후공정 창고에 물품을 따로 넣는 방식으로 만들고자 계획하고 있다. 또 바뀔 수도 있지만.
그리고 검사를 총 2번 하는데 비전검사는 모양과 흠집을 검사하고, 센서 검사는 색깔을 검사하는 환경을 구성하려고 한다. 센서 검사는 감광액의 정상 도포 여부를 확인한다는 컨셉인데 시간이 된다면 비전검사로 대체하는 것을 고려해보고 있다.
2. 기술스택
아래는 기술 스택인데 교육과정 내내 배워왔던 걸 활용할 거 같다.
앞으로 쓸 일지 자체에는 엄청 중요한 부분은 아니므로 간단하게 표만 나열해놓겠다.
| 구분 | 사용 기술 / 도구 |
|---|---|
| PLC | Mitsubishi |
| DB / SQL | Oracle, MySQL (예상) |
| 부품 도면 설계 | SolidWorks |
| 전장 설계 | Eplan |
| Digital Twin | S-Prodis (OPC UA 서버 활용) |
| SCADA | CIMON |
| 로봇 제어 | DoBot Studio, C# |
| 비전 검사 AI | OpenCV (Python), C# |
기술스택 보다보니까 디지털트윈 복습을 따로 안할 걸 깨달았다.
찝찝하지만 어차피 2주 후 정도에 또 할테니까 그때 글 쓰는 걸로 해야겠다.
그럼 2025-11-02 복습 끝
