BAGGING(Bootstrapping AGGregatING)
-> Ensemble Learning이라고도 불리고, 여러 모델을 만들어 예측값을 각각 구하고, 이 예측값을 결합하여 새로운 예측을 하는 기법
Boosting
-> 데이터에 맞는 여러 컨셉의 모델을 Sequential하게 합쳐 새롱운 모델을 만들고 이를 통해 예측값을 구하는 기법
LG Aimers
1. Explainable AI (XAI)
최근의 딥러닝은 성능이 좋아졌지만 모델이 너무 복잡해져서, 그 결과에 대한 해석이 거의 불가능할 정도이다.
즉, 입력과 출력만 알고 그 과정은 하나의 블랙박스처럼 동작하게 되는 것이다.
1) 왜 필요한가?
- 알고리즘의 예측 결과에 대한 신뢰도 상승
- 오류를 고치는데 유리
2) XAI의 설명 방법
-
Local VS Global
: 개별 데이터의 작동 과정을 설명한다
: 전체적인 데이터의 작동 방향을 설명한다 -
White-Box VS Black-Box
: 모델의 내부구조를 알고 작동 방향을 설명한다.
: 모델의 내부구조를 모르는 상태에서 작동 방향을 설명한다. -
Intrinsic VS Post-Hoc
: 모델을 훈련하기 이전에 모델의 복잡도를 설명이 쉽도록 설계 후 설명한다.
: 모델을 훈련한 후에 특정 함수를 적용해 보며 설명하는 방법
(사후 추론을 통한 설명) -
Model-specific VS Model-agnostic
: 특정 모델 구조에만 적용이 가능한 설명방법
: 모델 구조에 상관없이 어느 모델에도 적용 가능한 설명방법
3) 예시
-
Linear model
: 각 Feature에 대한 가중치를 통해 전체적인 모델을 설명할 수 있다
: Global, White-Box, Intrinsic, Model-Specific -
Decision Tree
: 각 label에 대한 확률을 통해 전체적인 모델을 설명할 수 있다
: Global, White-Box, Intrinsic, Model-Specific -
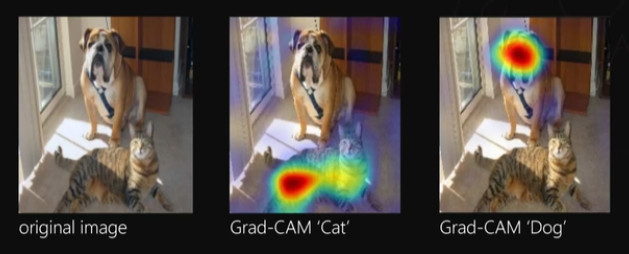
Grad-CAM
: Local, White-box, post-hoc, Model-agnostic
: <아래 그림은 예시>
4) 종류
-
Saliency map-based
: 하나의 이미즈를 모델의 입력으로 넣었을 때, 예측 결과에 대한 설명을 중요하게 적용한 부분을 하이라이트한 히트맵으로 보여주는 방법들
: White-Box모델에 적용할 수 있는 대표적인 방법이다.- Simple Gradient Method
- SmoothGrad Method
- Class Activation Map (CAM)
- Grad-CAM
-
Perturbation-based
: 입력 데이터를 조금씩 바꾸면서 그에 대한 출력을 보고 이 변화에 기반해 설명하는 방법
: Black-Box모델에 적용할 수 있는 대표적인 방법이다- Local Interpretable Model-agnostic Explanations (LIME)
- Randomized Input Sampling for Explanation (RISE)
-
Influence function-based
: 입력 Data Set이 아닌 Training Data Set중에서 해당 모델을 학습시키는데 가장 큰 영향을 미친 Image를 해당 분류에 대한 설명이라고 판단하는 방법
5) XAI에 대한 평가방법
우리는 우리가 고안한 XAI방법에 대해서 다른 방법들에 비해 좋은 설명 방법인지 아닌지 평가할 필요가 있다.
이 방법에는 다음이 존재한다.
-
Human based
- Amazon Mechanical Turk Test (AMT Test)
: Human-based 방법으로 두 XAI방법에 대한 설명을 보고 사람이 어떤게 더 좋은 설명방법이었는지 고르는 방식이다.
- Amazon Mechanical Turk Test (AMT Test)
-
Human Annotation
: 사람이 input data에 대한 annotation을 제공하여 평가하는 방법- Pointing Game
: Human-based-annotation 방법으로 사람이 Bounding box를 제공해주고 XAI의 설명이 이 Bounding box안에 존재하는지 판단하는 방법이다. - Weakly supervised sementic segmentation
- Pointing Game
-
Pixel perturbation
: 픽셀을 교란시키면서, 즉 label을 잘 설명하는 image의 부분을 가리면 score값이 작게 나오고 상관없으면 score값이 크게 나오는 것을 이용- Area Over the MoRF Perturbation Curve (AOPC)
- Insertion and Deletion
-
RemOve And Retrain (ROAR)
: XAI가 중요하다고 판단한 Pixel을 지우고 재학습한 후 모델의 정확도가 얼마나 떨어지는지 확인하는 방법
2. 인과추론
1) 인과성과 딥러닝
강화학습의 과정은 환경에 변화를 주어 원하는 상태로 변화시키는 인과관계로 해석할 수 있다.
또 기계학습의 과정은 입력 데이터의 상관성을 학습시키는 것과 같다.
3. 자율주행관련
현재 자율주행 관련 핵심 키워드
- Autonomous Dring
: 운전자의 개입 없이 주행이 가능할 정도로 고도화 되어야한다. - Connectivity
: 연결형 자율주행을 통해 교통관리의 효과성 극대화 - Electrification
: 높은 에너지 효율성을 통한 최대 주행거리 증가
자율주행의 단계
-
lv0 수동 운전
운전자가 모든 운전을 제어 -
lv1 주행보조: Feet-Off
차량이 자동으로 속도 제어가 가능한 상황 -
lv2 부분적 자율주행: Hands-Off
한정된 환경에서 속도 제어및 조향장치 자동화가 가능한 상황 -
lv3 조건부 자율주행: Eyes-Off
다양한 환경에서 속도 제어및 조향장치 자동화가 가능한 상황
(유사시에만 운전자의 개입이 필요하다.) -
lv4 고도 자율주행: Mind-Off
대부분의 환경에서 속도 제어및 조향장치 자동화가 가능한 상황
(특정한 상황을 제외한 대부분의 상황에서 운전자의 개입이 불필요하다.)
-
lv5 완전 자율주행
운전을 위해서는 운전자가 불필요한 상황
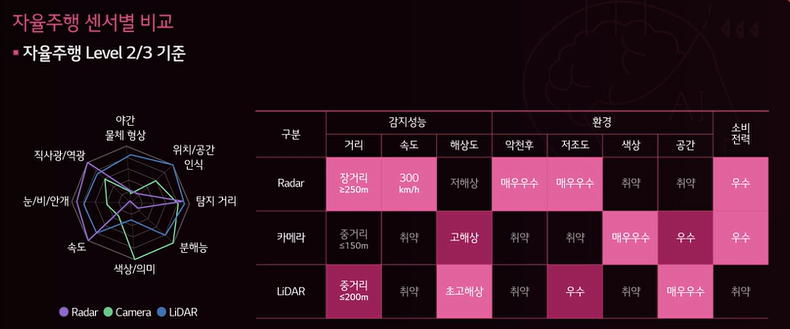
자율주행 센서
-
카메라
: 고화소화, 저조도 개선이 관건 -
레이더
: 안테나 및 신호처리 S/W기술이 관건 -
라이다
-
V2X통신 (lv4이상의 자율 주행의 경우 반드시 필요)
-
오디오 기술 (lv4이상의 자율 주행의 경우 반드시 필요)
레이더란?
RAdio Detection And Ranging(RADAR)의 약어로 Radio Wave를 이용한 사물탐지 기술
레이더 원리
거리측정: ToF원리 이용(송신된 전파가 반사되어 입력되는 시간을 측정)
레이더 종류
사용 목적에 따라
- 군사용 레이더
- IoT 레이더
- 차량용 레이더
- ADAS용 레이더
송신 신호의 변조 방식에 따라
-
Pulsed Radar
: 구형파(사각파)를 이용하는 방식 -
군사용으로 주로 사용
-
진폭을 높여 신호를 멀리 보내는 용도
-
구현하기 어려워 고가의 장비임
-
FMCW Radar
: 연속적인 삼각파를 이용하는 방식 -
차량용(상업용)으로 주로 사용
레이더 필요기술