Waymo Open Motion Dataset (WOMD)
들어가기전에: Waymo Open Motion Dataset (WOMD) 란?
- WOMD라고도 부름
- 여섯 도시에서 채집된 로그
- 학습 486 995, 검증 44 097, 테스트 44 920
- 각 시나리오에는 150m by 150m HD roadgraph가 잘려서 포함되어 있음
nuplan VS WOMD
| 항목 | WOMD v1.2.1 | nuPlan (2025‑06 기준) |
|---|---|---|
| 총 주행 시간 | 약 574 시간 (세그먼트 103 k × 20 s) | 약 1 282 시간 (로그 15 k × 평균 300 s) |
| 도시 수 | 6개 샌프란시스코·피닉스·LA·시애틀·디트로이트·마운틴뷰 | 4개 라스베이거스·보스턴·피츠버그·싱가포르 |
| 센서·주석 | WOMD v1.2.1 | nuPlan |
|---|---|---|
| LiDAR | 1개 중거리 + 4개 단거리 → 포인트클라우드 임베딩 제공 (원본 점 구름은 제공 X) | 동일 구성 + 원본 점 구름(10 Hz) 128 h 분량 제공 |
| 카메라 | 8대 360° 영상 → 이미지 임베딩만 제공 | 6–7대 멀티뷰 원본 영상(부분 제공) |
| 객체 클래스 | 3종 (차·보행자·자전거) | 9종 + 교통신호 상태·차선 ID |
| 지도 정보 | 고해상도 Lane Graph (차선 중심선, 경계) | Lane Graph + 미션 루트(출발·목적지), 교차로 태그 |
Waymo Sim Agents Challenge
어떤 데이터셋 split으로 평가해?
- WOMD 검증·테스트 split에 포함된 (검증 44 097, 테스트 44 920 )
- 수만 개의 시나리오를 모두 돌려 얻은
- 시나리오‑별 점수를 단순 평균한 값
- 시뮬레이션은 자동차 제어 Loop(50~100 ms) 안에 끝나야 한다 .
내 학습 모델 굴리는 방법
- input
- 과거 1초 log
- HD map
- output
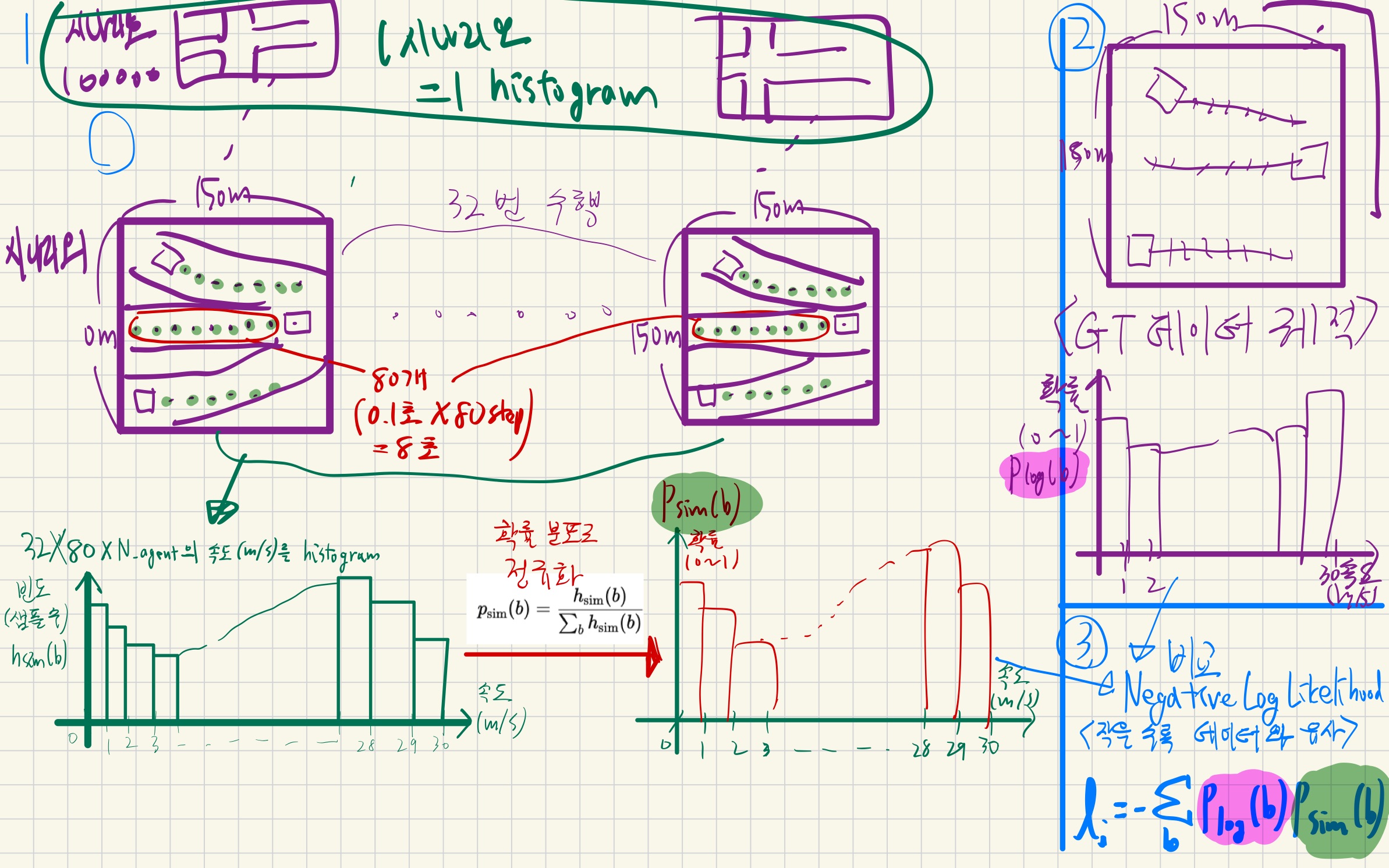
- multi agent에 대해, closed loop로 1 step씩 80 step(0.1초 간격 이므로 8초) 미래 궤적을 생성함.
- 위 행동을 32번 반복함
- multi agent에 대해, closed loop로 1 step씩 80 step(0.1초 간격 이므로 8초) 미래 궤적을 생성함.
하드웨어, FPS 조건?
- 학습·추론에 쓰는 GPU·CPU 종류나 개수에는 아무 제한이 없습니다.
2. 평량적 평가 metric
2.1. Realism Meta Metric (RMM)
- 실제 교통 데이터와, 우리 학습 모델의 데이터가 얼마나 유사한가? 를 평가.
- 실제 교통 데이터의 분포를 얼마나 잘 모사했는가?
- 데이터 분포 모사가 목적이지, 안전하고 빠르게 가는 차량을 만드는게 목적이 아님
- 예: 충돌을 0으로 만드는 편법은 오히려 Distribution Mismatch를 키워 Map·Kinematic 점수를 깎을 수 있습니다
Realism Meta 측정 방식
- Realism Meta 는 총 28개 항목에 대해서 종합적으로 평가하는 metric
- 28개 항목은 아래 3가지 카테고리로 나누어짐
- Kinematic (8개)
- 속도·가속도·각속도처럼 ‘차가 어떻게 움직였나’
- Interactive (9개)
- 충돌 횟수, TTC 같이 ‘차들끼리 어떻게 상호작용했나’
- Map-based (11개)
- 차선 이탈, 도로 밖 주행 등 ‘지형 규칙을 얼마나 지켰나’
- 위 28개 항목에 대해 점수()를 각각 매긴 후, weighted() sum을 수행합니다.
- 다만 를 어떻게 계산하는건지, 어려움. 아래에 설명합니다.
가장 쉬운 선속도에 대한 를 설명
총 평가 항목
| 그룹 | # | 이름(축약) | 직관적 설명 | 단위 | ||
|---|---|---|---|---|---|---|
| Kinematic | 1 | Linear Speed | 순간 속도 ( | \mathbf{v} | ) | m/s |
| 2 | Linear Accel | ( | \dot{\mathbf{v}} | ) | m/s² | |
| 3 | Linear Jerk | ( | \ddot{\mathbf{v}} | ) | m/s³ | |
| 4 | Angular Speed | 요(rate) ( | \omega | ) | rad/s | |
| 5 | Angular Accel | ( | \dot{\omega} | ) | rad/s² | |
| 6 | Angular Jerk | ( | \ddot{\omega} | ) | rad/s³ | |
| 7 | Heading Change Rate | 1‑스텝 헤딩 차 | rad | |||
| 8 | Heading Accel | rad | ||||
| Interactive | 9 | Nearest‑Dist | 가장 가까운 객체까지 거리 | m | ||
| 10 | Collisions | 충돌 여부(0/1) | - | |||
| 11 | TTC | Time‑to‑Collision | s | |||
| 12 | Inv‑TTC | 보조항목 | 1/s | |||
| 13 | Relative Speed | 앞차와 속도 차 | m/s | |||
| 14 | Overtake Count | 추월 횟수 | # | |||
| 15 | Cut‑in Count | 차선 끼어들기 횟수 | # | |||
| 16 | Follow‑Headway | 앞차 기준 시간 간격 | s | |||
| 17 | Gap Closing Rate | 거리 감소 속도 | m/s | |||
| Map‑based | 18 | Road‑Edge Dist | 도로 가장자리 거리 | m | ||
| 19 | Off‑road Flag | 도로 이탈 여부 | - | |||
| 20 | Centerline Dist | 차선 중심선 거리 | m | |||
| 21 | Lane‑Change Count | 차선 변경 횟수 | # | |||
| 22 | Traffic‑Light Stop | 정지선 지킴 여부 | - | |||
| 23 | Stop‑Sign Compliance | 정지표지 준수여부 | - | |||
| 24 | Speed‑Limit Violation | 제한속도 초과 비율 | % | |||
| 25 | Wrong‑Way Flag | 역주행 여부 | - | |||
| 26 | Intersection‑Encroach | 교차로 중앙 침범 거리 | m | |||
| 27 | Turn‑Heading Error | 회전 각 편차 | rad | |||
| 28 | Trajectory‑Smoothness | 궤적 곡률 변화 | 1/m |
(28개 평가 항목
- 실제 구현은 9 개 ’코어’ 지표를 사용한 초기 버전과, 위처럼 28 개로 확장한 V1(2023.12) 양쪽이 존재
- 9 개 코어 항목(선속·선가속·각속·각가속·최근접 거리·충돌·TTC·도로 가장자리 거리·오프로드)은 모든 버전 공통
2.2. 참고: minADE (최소 평균 변위 오차)
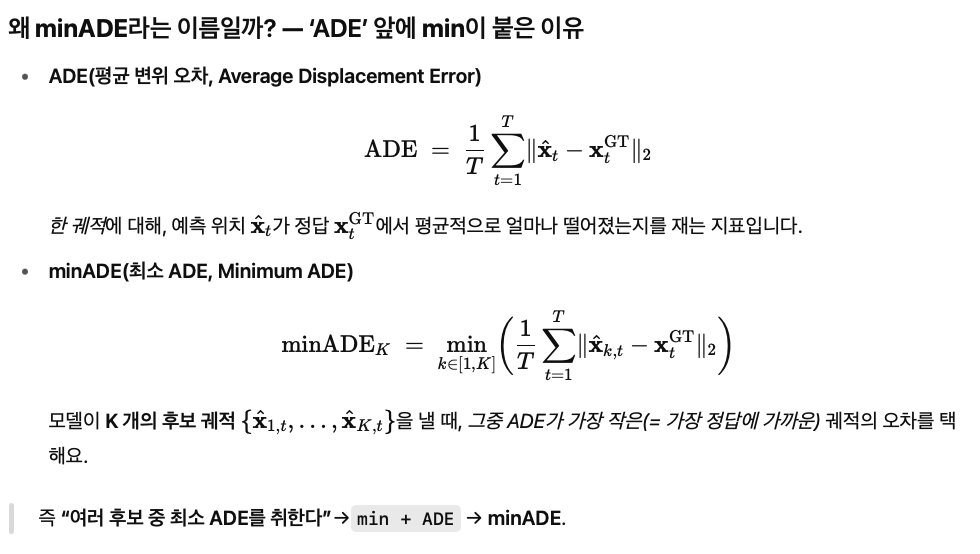
뭘 측정하는거야?
- 가장 잘 맞는 후보가 1개라도 포함돼 있다면 minADE 점수가 높게 나오므로, minADE는 “포괄성(coverage)”을 측정합니다.
- 한계가 있는 metric이라고 합니다.

ad_official