싱글 스레드의 강력함, IO Multiplexing
📚 글을 쓰게 된 이유
최근 Redis나 Node.js의 Event Loop 그리고 톰캣의 NIO 등, 최신 기술인데 싱글 스레드로 작동하는 것이 신기했다. 아무리 멀티 스레드의 Context Switching 같은 오버헤드가 크다 해도 요즘 발달한 CPU 스케줄링을 잘 활용하여 멀티 스레드가 유리하다 생각했기 때문이다.
그리고 조금 찾아보니 IO Multiplexing 기술의 강력함에 대해 흥미를 가져 글을 정리하게 됐다.
간단하게 한 줄 요약하자면, IO 같은 무거운 작업은 전문가가 맡도록 하자!
하드웨어에서 Multiplexer (Mux), Demultiplexer (Demux)
멀티플렉서라고 이미 하드웨어에서 여러 채널의 정보를 하나의 장치가 처리하도록 만든 기술이 있다. 이 이름을 따서 IO Multiplexing 기술이라 부른다고 한다.
- 아날로그 또는 디지털 신호를 하나의 채널에서 수신해서 여러 출력선 중 하나로 전달
- 장점
- 비용 절감 하나의 연결마다 연결선이 필요한 것이 아닌 여러 연결을 하나의 채널에서 처리할 수 있으므로 비용이 효율적이다
- 비용 절감 하나의 연결마다 연결선이 필요한 것이 아닌 여러 연결을 하나의 채널에서 처리할 수 있으므로 비용이 효율적이다
- 이를 응용하면 여러 신호를 관리하는 Bus 구조가 있다
Socket 이란? - “Everything Is a File”
- Linux/Unix 에선 Socket도 하나의 FD 인터페이스로 관리된다고 하여 나온 말
- Low Level File Handling 기반으로 Socket 기반 데이터 송수신이 가능함
- 즉, I/O 작업은 Server 내에서 읽기/쓰기 뿐만 아니라 서버-클라이언트 간 네트워크 통신에도 적용되는 개념이다.
Linux 계열의 Multiplexing 기법
1. 기본 개념
- IO 작업은 user space에서 직접 수행할 수 없기 때문에 user process가 kernel에 IO 작업을 “요청” 하고 “응답”을 받는 구조
- 응답을 어떤 순서로 받는지 (Synchronous , Asynchronous)
어떤 타이밍에 받는지 (Blocking , Non-blocking) 에 따라 여러 모델로 분류
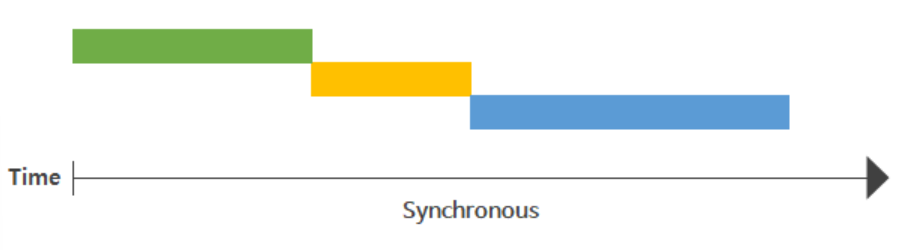
Synchronous, 동기
- 모든 IO 요청, 응답이 순서가 있다 → 작업의 순서를 보장
- 일련의 Pipeline을 준수하는 구조에서 효율적
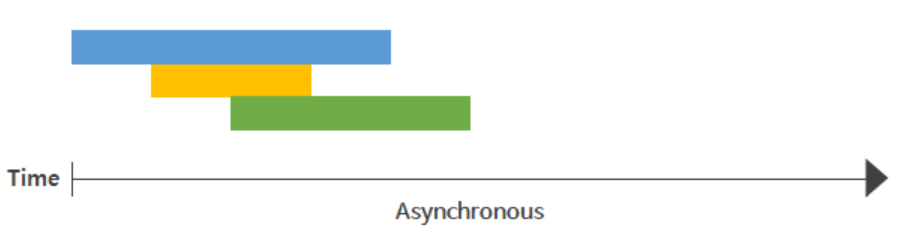
Asynchronous, 비동기
- kernel에 IO 작업을 요청해두고 다른 작업 처리 가능 → 작업의 순서 보장하지 않음
- 작업 완료를 kernel space에서 통보해줌
- 각 작업들이 독립적, 작업 별 지연이 큰 경우 효율적
Blocking, 블로킹
- 요청한 작업이 끝나는 것을 기다리다가 응답 결과를 반환받음
- 작업을 기다림
Non-Blocking, 논 블로킹
- 작업 요청 이후 결과를 필요할 때 전달받음
- 작업을 기다리지 않음
- 중간중간 상태 확인 가능 (Polling)
Sync, Async, Block, Non-Block 혼동
- 어떤 작업을 기다리느라 Blocking된 동안 다른 작업이 끼어들 수 있으면 Asynchronous
IO 모델 종류
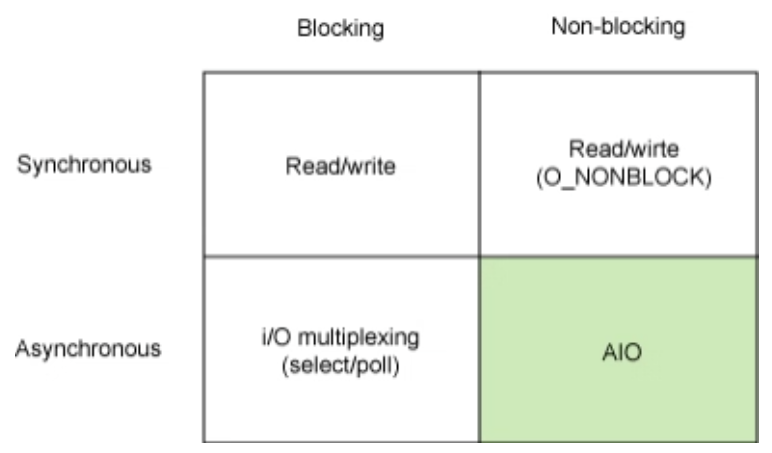
- 위에 IO 멀티플렉싱이 Asnyc - Blocking 으로 소개되지만, 구현 방식에 따라 구분이 달라질 수 있다.
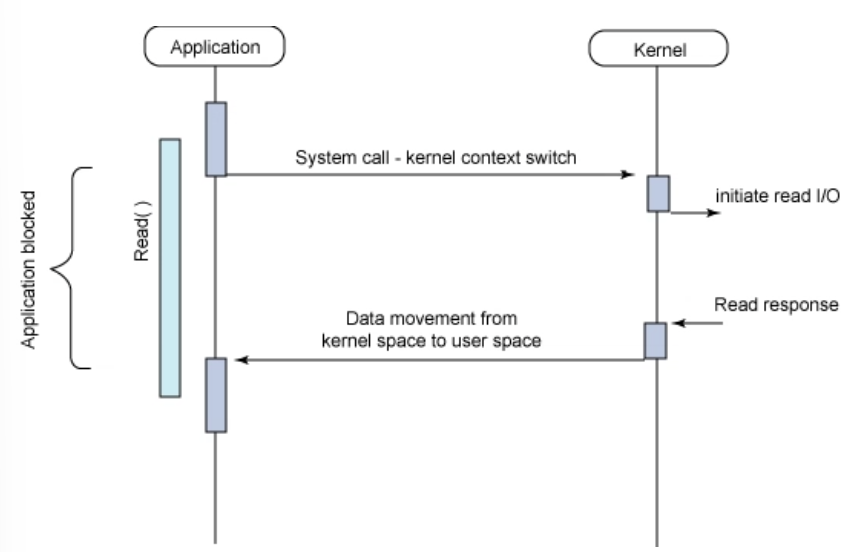
Synchronous Blocking IO
- 가장 흔한 IO 모델, user space에서 process가 kernel에게 IO를 요청 (system call)한 후, kernel의 작업 결과 반환까지 중단된 채 대기
- 이때 user space의 process는 CPU를 점유하지 않은 채 대기
Synchronous Non-Blocking IO
- Non-block 동작을 위해 socket 생성 시
O_NONBLOCK옵션을 줘서 구성 - socket으로 IO system call을 하게 되면 block되는 것이 아닌 즉시 결과를 반환받음
- 읽을 데이터가 없으면 -1
- 일반적으로 EAGAIN , EWOULDBLOCK
- Synchronous 동작이기에 기다리지는 않지만, 처리할 소켓 상태를 계속 물어보는 Busy Waiting (폴링 방식)
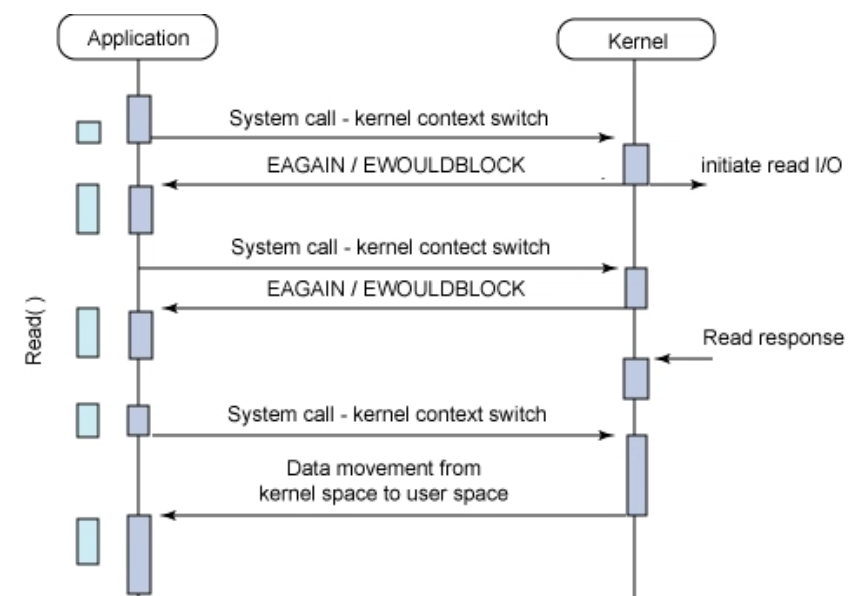
-
user process는 여전히 IO 완료만 기다리며 context switching만 빈번하게 일어남
-
Synchronous 모델에서 여러 작업을 동시에 처리하려면 멀티쓰레드로 동작해야 한다. 하지만 IPC나 동기화 (Semaphore, Mutex 등)을 고려해야 하기 때문에 복잡함
-
이 때문에 위 방식보다 Multiplexing , 다중화 기법이 각광받음❗
IO Multiplexing (멀티플렉싱, 다중화)
-
"파일"이란 유저 공간에서 커널 공간에 진입하는 인터페이스(다리) 역할
-
Multiplexing (다중화) : 여러 개의 신호나 데이터 스트림을 하나의 채널에서 관리하는 하드웨어 기법에서 영감을 받음 (저비용 고효율)
- 즉, IO Multiplexing이란 소프트웨어에서 “한 프로세스가 여러 파일(File)을 관리” 하는 기법
-
Server-Client 구조에서 server에서 여러 socket을 관리하여 클라이언트가 접근할 수 있게 구성된다. socket 또한 IP와 PORT 메타 정보를 가지는 파일
- 이러한 socket을 기존엔 클라이언트가 요청을 하면 서버가 쓰레드를 할당해서 처리 -> 클라이언트 요청마다 쓰레드를 할당하는 비효율적인 쓰레드 사용,
-
IO Multiplexing 기술은 하나의 스레드가 소켓의 FD를 감시하고 관리해주고 바로 처리할 수 있는 상태만 골라준다.
- 어떤 상태로 대기하냐에 따라 select, poll, epoll (linux), kqueue (bsd), iocp (windows) 기법이 있다
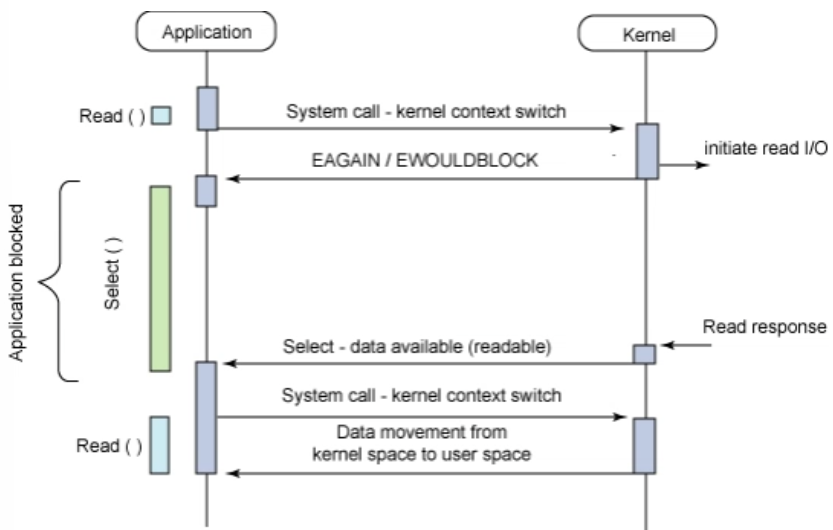
Asynchronous Blocking IO 모델
- Block? Non-Block 아닌가?
- 처음 Read()의 응답이 즉각적으로 미완료 상태를 반환하여 Non-blocking socket 동작을 보여주지만, kernel이 미완료 응답을 반환하면 user process에서 FD가 준비가 될 때까지 대기하므로 Application 레벨에서 Blocking
정리하자면, IO Multiplexing 기법으로 여러 IO 작업을 따로 맡겨서 관리할 수 있다.
출처: https://notes.shichao.io/unp/ch6/
select()
- fd_set을 통해 최대 1024개의 FD를 관리
- 특정 FD가 사용 가능한 지 확인하기 위해 모든 FD를 루프돌아야함
- select 함수가 동기인지 비동기인지 검사하는 간단한 TCP 서버 코드
#include <stdio.h> #include <stdlib.h> #include <string.h> #include <unistd.h> #include <arpa/inet.h> #include <sys/socket.h> #include <sys/time.h> #include <sys/select.h> #include <time.h> #define BUF_SIZE 100 // 간단한 TCP 서버를 구현한 C 프로그램 // @function 동시에 여러 클라이언트와 통신할 수 있고, // 받은 데이터를 다시 클라이언트에게 돌려주는(echo) 기능 수행 int main(int argc, char *argv[]) { int serv_sock, clnt_sock; // fd : file descriptor struct sockaddr_in serv_addr, clnt_addr; // server and client address struct timeval timeout; fd_set reads, cpy_reads; // collection of file descriptor int fd_max, fd_num; socklen_t addr_size; // size of client socket int i, str_len; char buf[BUF_SIZE]; // num of arg should 2 if (argc != 2) { printf("Usage : ./program_name <port>\n"); exit(1); } // make server socket (IPv4) serv_sock = socket(PF_INET, SOCK_STREAM, 0); if (serv_sock == -1) // if making socket fail { perror("error : failed socket()"); } // 서버 주소 설정 및 소켓 바인딩 memset(&serv_addr, 0, sizeof(serv_addr)); // 메모리 초기화 serv_addr.sin_family = AF_INET; // 주소 체계 저장 serv_addr.sin_port = htons(atoi(argv[1])); // 인자로 받은 port 번호 // 소켓에 주소 할당 // sockaddr* : sockaddr_in / sockaddr_un 이든 형변환 if (bind(serv_sock, (struct sockaddr *)&serv_addr, sizeof(serv_addr)) == -1) { perror("error : failed bind()"); return 0; } // 연결 대기 및 큐 생성 if (listen(serv_sock, 5) == -1) { // 클라이언트 연결 대기 & 요청 queue에 저장 perror("error : failed listen()"); return 0; } // select I/O FD_ZERO(&reads); // fd_set 구조체를 0으로 초기화 FD_SET(serv_sock, &reads); // 서버 소켓을 fd_set에 추가하여 select() 함수에서 감시할 수 있도록 설정 fd_max = serv_sock; // 현재 열려있는 fd 중 가장 큰 값 저장 // 클라이언트 연결 처리 while (1) { // 이전 상태 저장 cpy_reads = reads; timeout.tv_sec = 5; timeout.tv_usec = 50000; // 시간 측정을 위해 현재 시간을 기록 printf("Before select: %ld seconds\n", time(NULL)); // 소켓에 입력이 있는지 감시 // select(nfds, readfds, write, err, timeout) // @param nfds 감시할 fd 최대값 + 1 // @param &cpy_reads 감시할 fd_set // @param &timeout 타임아웃 설정 if ((fd_num = select(fd_max + 1, &cpy_reads, 0, 0, &timeout)) == -1) { printf("fd_num : %d\n", fd_num); perror("select() error"); break; } // select 함수가 끝난 후의 시간 출력 printf("After select: %ld seconds\n", time(NULL)); // bit 값이 1인 필드 없음 = 발견된 read data 없음 if (fd_num == 0) continue; // 발견되면 fd 다 훑음 = O(n) for (i = 0; i < fd_max + 1; i++) { // select가 반환한 fd 중 입력이 있는 소켓 탐색 if (FD_ISSET(i, &cpy_reads)) { if (i == serv_sock) { // data 발생한 fd 찾으면 printf("putin serv_sock\n"); addr_size = sizeof(clnt_addr); // queue에서 연결 요청 하나씩 꺼내서 해당 client와 server socket 연결 clnt_sock = accept(serv_sock, (struct sockaddr *)&clnt_addr, &addr_size); FD_SET(clnt_sock, &reads); if (fd_max < clnt_sock) // loop 돌아야 하므로 fd 큰쪽으로 맞춤 fd_max = clnt_sock; printf("connected client : %d \n", clnt_sock); } else { str_len = read(i, buf, BUF_SIZE); // 클라이언트로부터 데이터 수신 if (str_len <= 0) { FD_CLR(i, &reads); close(i); printf("close client : %d \n", i); } else { // client로echo 응답 write(i, buf, str_len); } } } } } close(serv_sock); return 0; }
pselect()
- timeval 구조체로 timeout을 관리하던 것과 달리 timespec 구조체로 구현되어 나노초까지 컨트롤
- select와 달리 sigmask 인자 추가로 signal에 의한 비정상 동작을 방지
poll()
- 관리 가능한 최대 FD 수가 1024에서 무한 개로 검사
- select는 모든 FD를 루프도는 반면, poll은 실제 FD 개수만큼 루프를 돔
ppoll()
- select - pselect 와 마찬가지로 timeout과 signal 처리 로직 개선
epoll (linux)
- FD 관리 무한 , 앞에와 달리 FD 상태를 kernel이 관리하여 상태가 바뀐 것을 통지 해줌
- fd_set을 검사하기 위해 루프를 돌 필요가 없어졌다!
- 변화가 감지된 FD의 수가 아닌 FD 목록을 반환
- Level-Triggered
- 이벤트 발생한 이후 계속 버퍼에 저장해서 보관
- Edge-Triggered
- 이벤트 발생했을 때만 통보
Asynchronous Non-Blocking IO (AIO)
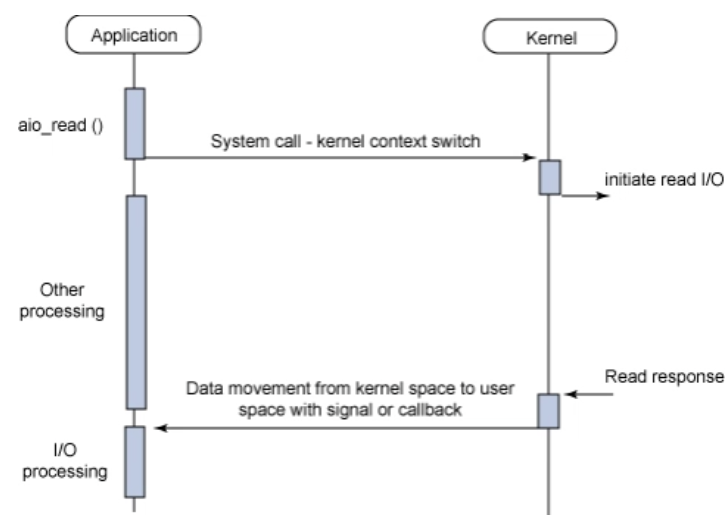
- 굉장히 효율적인 통신을 구현할 수 있을 것 같다!! → 실제에서 잘 안보이는 이유
- IO 작업을 위한 thread 유지, 관리 비용 + 확장성 떨어짐 + 완료 통지 방식에 대한 문제가 있다고 한다.
결론: 싱글 스레드임에도 처리 속도가 빠를 수 있는 이유
- 비동기 IO
- 프로그램이 파일에게 열도록 요청 → 커널이 엑세스 권한 부여 → 글로벌 파일 테이블에 항목 생성 → 소프트웨어에 해당 파일의 위치를 제공
- 시스템에서 열려 있는 모든 파일에 대해 하나 이상의 File Descriptor가 존재하는데, 이를 관리해주는 전용 채널을 만드는 것이다.
네트워크 IO Multiplexing model
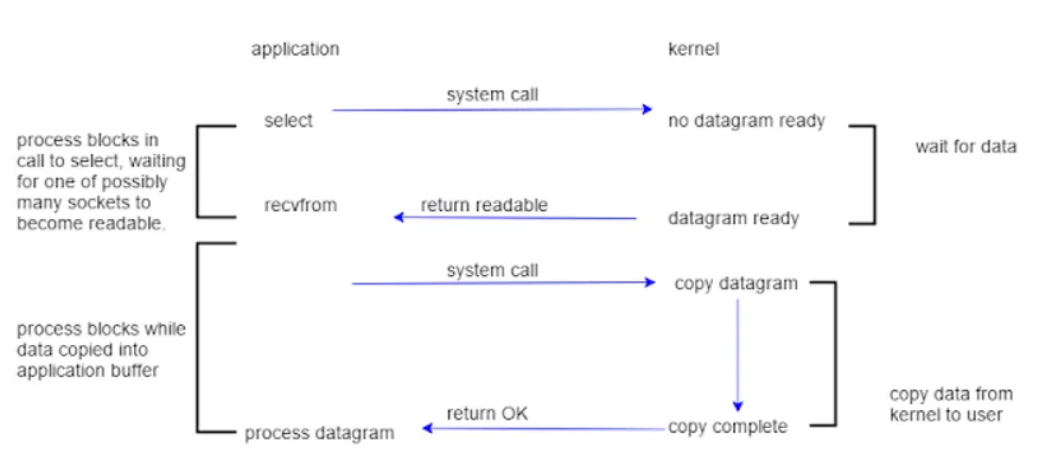
-
이 과정은 I/O Multiplexing 방식에서, 다수의 소켓 중 하나 이상의 소켓이 읽기 가능한 상태가 되었을 때 이벤트를 받기 위한 전형적인 방식이다.
select는 다수의 소켓에 대해 어떤 것이 데이터를 읽을 준비가 되었는지 확인하는 시스템 호출이고, 데이터가 준비되면 recvfrom 호출을 통해 커널에서 애플리케이션의 버퍼로 데이터를 복사해 온다. -
두 번의 블로킹이 발생하는데, 첫 번째는 select 호출에서 데이터가 준비될 때까지 대기하는 것, 두 번째는 recvfrom 호출에서 데이터를 복사하는 동안의 대기이다.
-
이 과정을 통해 애플리케이션은 효율적으로 네트워크 I/O 작업을 수행할 수 있게 되며, 특히 다수의 소켓에 대한 비동기 작업을 수행할 때 유용하다고 한다.
- 출처