2.1. 연립일차방정식의 시스템(Systems of Linear Equations)
-
일반적으로 연립일차방정식의 해는 세 가지 경우 중 한 경우가 된다.
- 해가 없는 경우
- 해가 하나 존재하는 경우
- 무수히 많은 해가 존재하는 경우
-
연립선형방정식의 계수들을 모아서 한꺼번에 한 벡터로 표현하여 풀 수 있다.


2.2. 행렬(Matrices)
단위행렬(Identity Matrix)
- 대각선 원소가 모두 1이고 나머지 원소가 모두 0인 정사각행렬이다.
- 행렬의 곱셈에서 항등원 역할을 한다.
(항등원: 어떤 연산에 대해, 그 연산을 적용했을 때도 원래 값이 변하지 않는 값)
역행렬(Inverse Matrix)
- 행렬 의 역행렬 은 와 곱했을 때 단위행렬이 되는 행렬을 말한다.
- 모든 행렬이 역행렬을 가지는 것은 아니다. 역행렬이 존재하려면 행렬이 정사각행렬이어야 하고, 행렬식(det)이 0이 아니어야 한다.
전치행렬(Transpose Matrix)
- 행렬 의 전치행렬 은 행과 열을 뒤바꾼 행렬이다.
- 즉 의 (i, j) 원소는 의 (j, i) 원소가 된다.
대칭행렬(Symmetric Matrix)
- 전치행렬과 원래 행렬이 같은 행렬을 말합니다. 즉, 행렬 가 를 만족하면 는 대칭행렬입니다.
- 대칭행렬의 원소는 주대각선을 기준으로 대칭입니다.
행렬의 연칙
- 결합법칙
- 덧셈의 결합법칙:
- 곱셈의 결합법칙:
- 분배법칙
2.3. 연립일차방정식의 풀이(Solving Systems of Linear Equations)
일반해와 특수해
- 특수해는 연립일차방정식의 해 중 하나의 값을 의미한다.
- 일반해는 특수해와 하나로 특정화 되지 않는 일반해의 형식으로 얻을 수 있다.
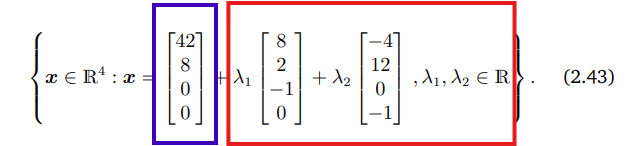
- 일반적인 접근법은 다음과 같은 3가지 단계로 구성되어 있다.
- 의 특수해를 찾는다
- 의 모든 해를 찾는다.
- 위의 두 단계의 모든 해를 종합하여 일반해의 형태로 전환한다.
성분 변환(Elementary transformation)
연립일차방정식을 해결하기 위해 행렬을 간소화 하는 과정에서 사용되는 세 가지 기본적인 연산으로, 이 연산들을 통해 “행 사다리꼴(Row Echelon Form)으로 변환하여 쉽게 해를 구할 수 있다.
- 두 행을 교환 (Row Swap)
- 행렬에서 두 행의 위치를 서로 바꾼다
- ex) 과 를 교환하는 연산은 로 표기한다.
- 한 행에 상수를 곱함 (Scaling a Row)
- 한 행의 모든 성분에 동일한 상수를 곱한다.
- ex) 을 3배하는 연산은 로 표기합니다.
- 한 행에 다른 행의 배를 더함 (Row Addition/Subtraction)
- 한 행에 다른 행의 배를 더하거나 빼서 변형한다.
- ex) 에 의 2배를 더하는 연산은 로 표기합니다.
가우시안 소거법(Gaussian elimination)
가우시안 소거법은 선형 방정식의 해를 구하기 위한 방법이다.
- 전진 소거 (Forward Elimination)
- 성분 변환을 통해 행렬을 행 사다리꼴로 변환한다.
- 행 사다리꼴은 상삼각 행렬 형태로 아래 삼각형 부분의 모든 성분이 0인 형태를 말한다.
- 역대입 (Back Substitution)
- 마지막 방정식부터 시작해 차례로 이전 방정식의 값을 구하고, 그 값을 이용해 나머지 변수들을 하나씩 구한다.
ex)
연립일차방정식
전진 소거 후의 행렬
역대입을 통한 변수 계산
행 사다리꼴 행렬 (Row-Echelom Form)
- 모든 0이 아닌 행은 0으로만 이루어진 행보다 위에 있어야 한다.
- 즉, 모든 0으로 이루어진 행은 행렬의 하단에 위치해야 합니다.
- 각 행에서 가장 왼쪽에 있는 0이 아닌 수(pivot 또는 leading entry)는 윗줄에 있는 pivot보다 오른쪽에 위치해야 한다.
- 각 행에서 pivot은 그 윗줄에 있는 pivot보다 오른쪽에 있어야 합니다. 즉, pivot이 왼쪽에서 오른쪽으로 "사다리"처럼 내려가는 형태가 됩니다.
- pivot 열의 값은 0이 아니며, 그 아래에 있는 값들은 모두 0이어야 한다.
- 각 pivot이 위치한 열에서는 그 아래의 모든 성분이 0이어야 합니다.
ex)
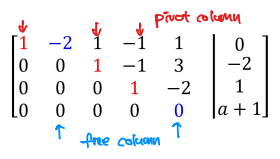
- pivot(basic) variable:
- free variable:
기초 변수(Basic Variable)
- 행 사다리꼴 행렬의 pivot 칼럼(각 행에서 첫 번째로 0이 아닌 항목이 있는 열)에 해당하는 변수들이다.
- 자유 변수의 값에 종속되어, 자유 변수가 정해지면 그 값이 정해지는 변수를 말한다. → 방정식에서 다른 변수에 의해 값이 결정되는 변수를 말한다.
- 기초 변수는 선형 시스템의 특정 해를 결정하는 데 사용된다.
자유 변수(Free Variables)
- 기초 변수가 아닌 나머지 변수들을 말한다.
- 자유 변수는 값을 자유롭게 선택할 수 있으며, 선택한 값에 따라 기초 변수의 값이 결정된다.
- 자유 변수는 선형 시스템의 해가 무수히 많은 경우 그 해를 표현하는 데 사용된다. 선형 방정식 시스템에서 독립적인 방정식 수가 변수의 수보다 적을 때 발생한다.
기약 행 사다리꼴(Reduced Row-Echelon)
Reduced Row-Echelon은 직관적인 방법으로 일반해를 결정할 수 있게 하기 때문에 매우 중요한 역할을 한다.
가우시안 소거법은 선형 방정식을 성분 변환을 통해 Reduced Row-Echelon 형태로 바꾸기 위한 하나의 알고리즘이다.
- Row-Echelon Form이다.
- 모든 pivot이 1이다.
- 피벗은 해당 열의 0이 아닌 유일한 항목이다.
음의 -1 트릭(The minus-1 Trick)
행 연산 중에서 한 행에 상수를 곱하는 연산의 일환으로, 특히 -1을 곱해 값을 뒤집거나 0을 만들기 위해 사용되는 기법이다.
가우시안 소거법을 이용한 역행렬 계산
가우시안 소거법을 통해 행렬을 기약 행 사다리꼴(Reduced Row Echelon Form)으로 변환하면서, 역행렬을 구할 수 있다.
- 시작 행렬 작성
주어진 행렬 와 동일한 크기의 단위행렬 을 나란히 놓습니다.$$ \left[ A \mid I \right] = \begin{pmatrix} a & b & 1 & 0 \\ c & d & 0 & 1 \end{pmatrix} $$ - 행 연산을 통해 를 단위행렬로 변환
가우시안 소거법을 사용하여 A를 단위행렬로 바꾸어줍니다. 이때, 단위행렬이었던 부분이 변형되며 역행렬 이 됩니다. - 결과 확인
최종적으로 의 형태가 완성됩니다. 여기서 오른쪽에 있는 행렬이 역행렬 이 됩니다.
2.4. 벡터 공간(Vector Spaces)
벡터 공간(Vector space)
벡터 공간은 벡터의 집합으로, 벡터의 덧셈과 스칼라 곱셈이라는 두 가지 연산을 만족해야 합니다.
(여기서 , 는 벡터이고, 는 스칼라입니다.)
- 덧셈에 대해 닫힘성
벡터 공간 내의 두 벡터를 더한 결과는 다시 벡터 공간 내의 벡터이다.$$ \mathbf{u} + \mathbf{v} \in V $$ - 스칼라 곱에 대해 닫힘성
스칼라 값과 벡터 공간 내의 벡터를 곱한 결과는 다시 벡터 공간 내의 벡터이다.$$ c\mathbf{v} \in V $$
벡터 부분 공간(Vector Subspace)
벡터 부분 공간은 벡터 공간의 부분 집합으로, 그 자체가 또 하나의 벡터 공간이다. 벡터 부분 공간은 벡터 공간의 성질을 그대로 물려받으며, 벡터 덧셈과 스칼라 곱에 대해 닫혀 있어야 한다.
군(Groups)
집합과 그 집합 위에서 정의된 하나의 이항 연산(두 요소를 결합하여 새로운 요소를 만드는 연산)을 다룬다. 군은 네 가지 기본 성질을 만족하는 구조로 정의된다.
- 폐쇄성(Closure)
- 집합 내의 두 원소에 대해 연산을 수행했을 때 그 결과가 다시 그 집합 내에 존재해야 한다.
- 예: a∗b∈G (여기서 G는 군, a,b는 G의 원소)
- 결합법칙(Associativity)
- 세 원소의 연산 순서는 결과에 영향을 미치지 않는다.
- 예: (a∗b)∗c=a∗(b∗c)
- 항등원(Identity Element)
- 군 내에 어떤 원소 e가 존재하여, 그 원소와 다른 원소를 연산해도 원래의 원소가 유지된다.
- 예: a∗e=a (항등원 e)
- 역원(Inverse Element)
- 각 원소는 자기 자신과 연산했을 때 항등원을 만들어내는 역원이 존재한다.
- 예: a∗a−1=e (여기서 a−1는 a의 역원)
군의 예로는 정수 집합에서 덧셈 연산을 예로 들 수 있다. 모든 정수는 덧셈에 대해 항등원(0)과 역원(음수)을 가지므로, 이는 군을 이룬다.
일반 선형군(General Linear Group)
정사각 행렬의 군으로, 주어진 차원에서 역행렬이 존재하는 모든 정사각 행렬의 집합을 가리킨다.
GL(n,F)는 차원 n과 체 F(일반적으로 실수 또는 복소수)를 가진 모든 n×n 행렬로 구성되며, 그 행렬들의 곱셈에 대한 군이다.
이 집합 내의 모든 행렬은 역행렬을 가지고, 행렬 곱셈이 군의 연산이다.
2.5. 선형독립성(Linear Independence)
- 선형 독립성(Linear Independence): 한 집합의 벡터들이 서로 선형 결합으로 표현되지 않으면 선형 독립이다.
- 선형 종속성(Linear dependence): 한 벡터가 다른 벡터들의 선형 결합으로 표현될 수 있으면 그 벡터들은 선형 종속적이다.
2.6. 기저와 랭크(Basis and Rank)
- 기저(Basis): 벡터 공간을 생성하는 최소 집합으로, 선형 독립인 벡터들로 구성된다.
- 랭크(Rank): 행렬의 랭크는 행렬의 기저를 이루는 벡터의 개수로 정의된다.
2.7. 선형 사상(Linear Mappings)
- 선형 사상: 두 벡터 공간 사이의 선형 변환을 의미하며, 덧셈과 스칼라 곱을 보존하는 함수이다.
- 단사(Injective): 서로 다른 입력이 서로 다른 출력을 낳는 사상.
- 전사(Surjective): 모든 출력이 적어도 하나의 입력과 연결된 사상.
- 전단사(Bijective): 단사이면서 동시에 전사인 사상.
- 변환 행렬(Transformation Matrix): 선형 변환을 행렬 곱으로 나타낸 것이다.
2.8. 아핀 공간(Affine Spaces)
아핀 공간은 벡터 공간의 확장된 개념으로, 원점을 고정하지 않은 공간이다. 벡터 공간과 달리 평행 이동이 가능하다.