Visual SLAM이란?
SLAM(Simultaneous localization and mapping),
동시적 위치 추정 및 지도 작성으로, 임의 공간에서 이동할 때 주변을 탐색하면서 이동한 공간의 지도를 작성하고 자신의 위치를 파악하는 기술Localization: 위치 추정
Mapping: 지도 작성
- 카메라 영상 정보를 센서로 활용하는 SLAM
- 가격이 싸지만 계산 비용이 높음
- 종류
- Monocular: 1개의 단안 카메라
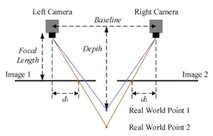
- Stereo: 2개의 고정된 카메라
- RGB-D: depth 정보를 얻을 수 있는 카메라
ORB SLAM의 개념
Monocular camera를 이용한 Visual SLAM의 한 종류로 다음과 같은 특징을 갖고 있다.
Feature-based
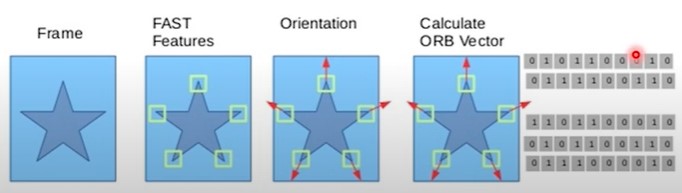
- ORB(Oriented FAST and Rotated BRIEF)
특징점 검출 방식을 사용- Feature Based 방식: 영상에서 특징점 추출
- Direct 방식: 영상의 픽셀 정보를 그대로 이용
Monocular camera
- 1개의 단안 카메라를 센서로 이용
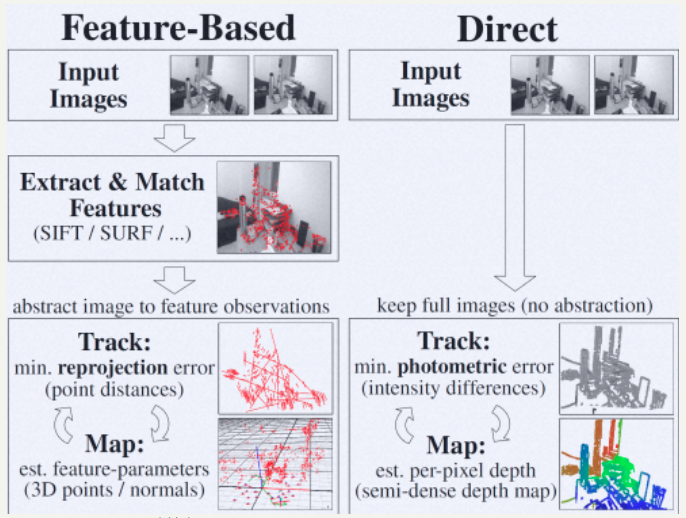
Feature 방식과 Direct 방식
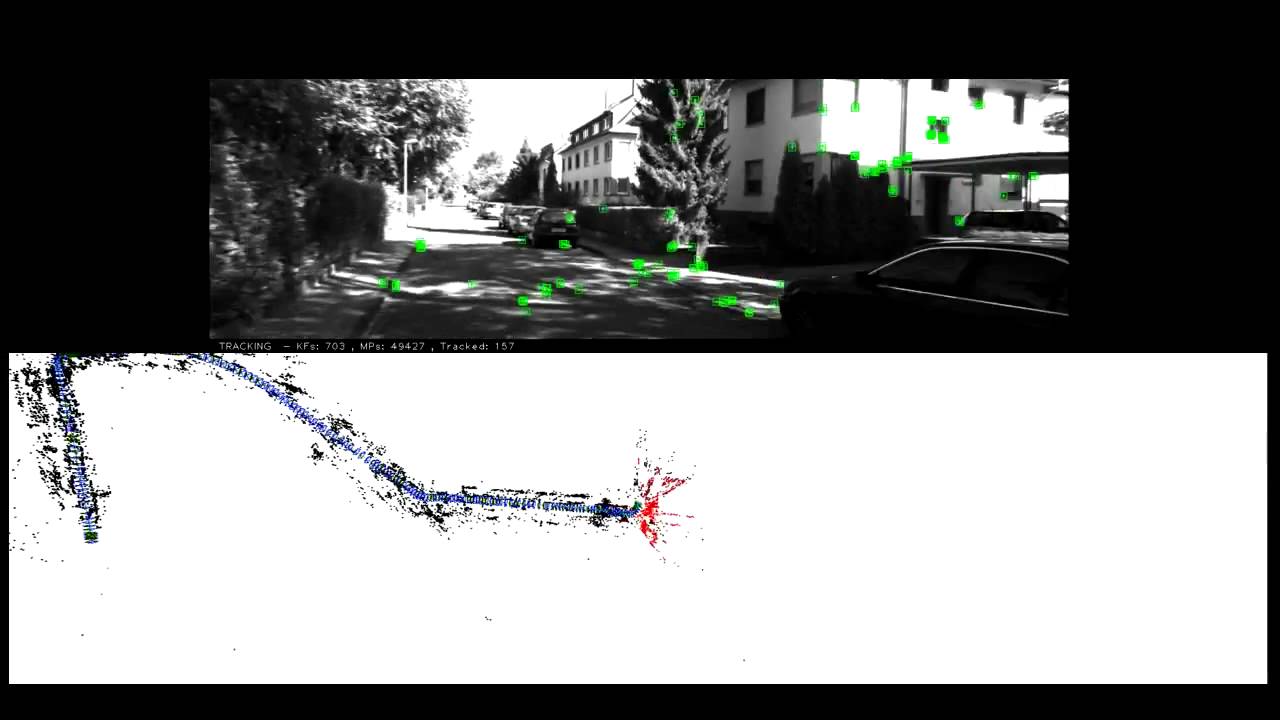
ORB SLAM의 구조
- Parallel three thread
- Tracking
- Local mapping
- Loop closing3개의 thread를 병렬로 사용하므로 매우 빠름
Tracking
- Find where you are by map!
- ORB Keypoint들로 카메라의 위치를 추정하는 과정
Local mapping
- 각각의 keyframe들의 정보를 지도에 mapping 시키는 과정
- 2D point -> 3D point

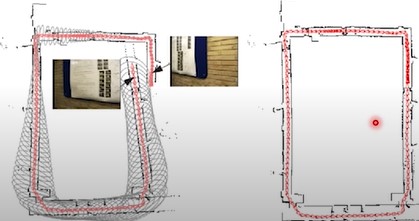
Loop closing
- Drift 현상 때문에 어긋난 경로를 다시 교정하는 작업
- Drift 현상: 원래 위치로 돌아왔음에도 불구하고 지도가 어긋나는 현상
Reference
https://www.youtube.com/watch?v=mth-SMWnfas&list=PLoJdZ7VvEiRNUxlIXlgy7Fh8ziyt4Hw50

자율 주행 개발자가 목표입니다.
글 잘 봤습니다.