Local Mapping
중복되는 Key Frame과 Tracking 후에 생성된 Map Point들을 최적화하고, 새로 들어오는 Key Frame을 아래의 순서로 처리하는 과정

Key Frame 삽입
- 새로운 Key Frame이 생성되면 이 Key Frame의 Bag of Words를 계산
- 이를 바탕으로 새로운 Key Frame과 원본 영상 프레임의 Map point를 비교함
- 그 후,
Covisibility Graph를 Update함

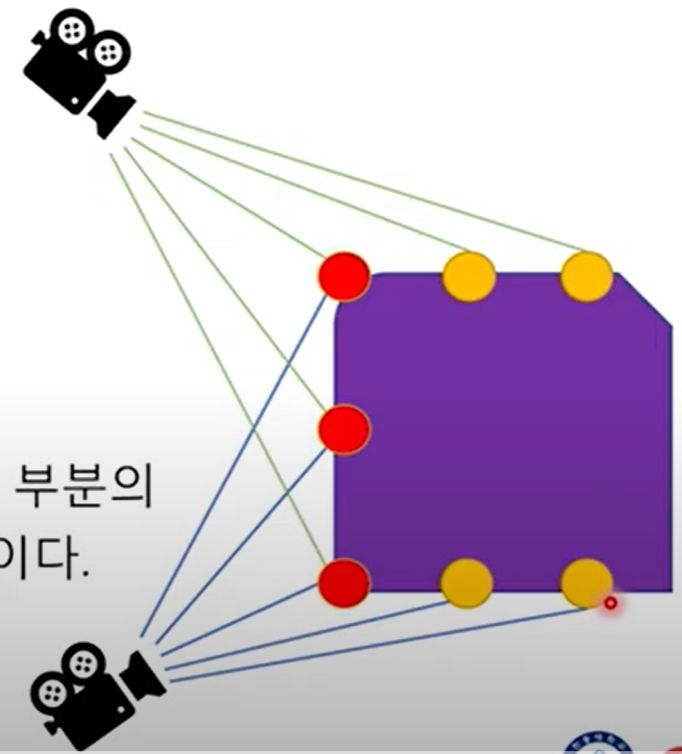
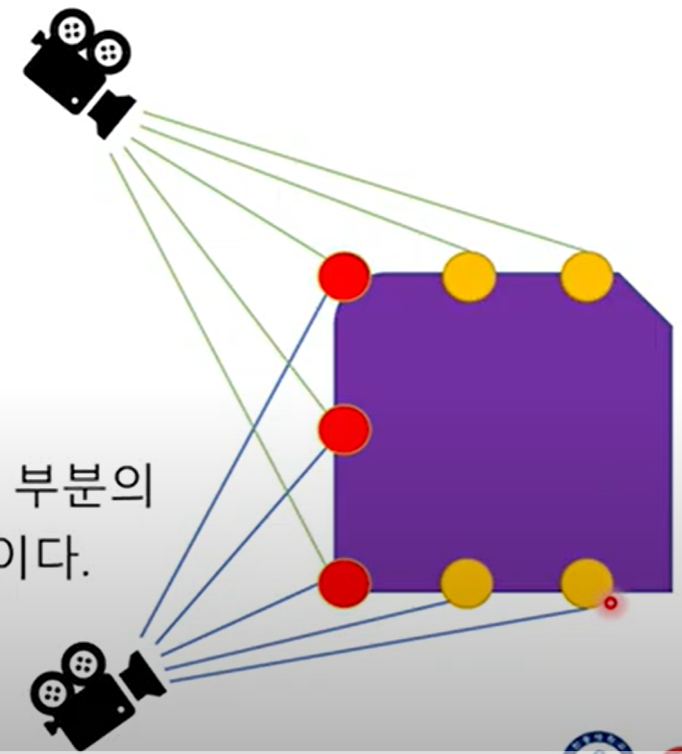
- covisibility Graph:
아래 그림에서 보았을 때, 노란 점은 한 시점에서만 해당 부분이 보이며, 붉은 점의 경우 두 시점에서 해당 부분을 볼 수 있음을 알 수 있다.
이와 같이 두 대 이상의 시점에서 겹치는 부분의 개수를 표현하는 것이 Covisibility graph이다.
- covisibility Graph:
작성 중~

자율 주행 개발자가 목표입니다.