공원 산책
문제 설명
지나다니는 길을 'O', 장애물을 'X'로 나타낸 직사각형 격자 모양의 공원에서 로봇 강아지가 산책을 하려합니다. 산책은 로봇 강아지에 미리 입력된 명령에 따라 진행하며, 명령은 다음과 같은 형식으로 주어집니다.
["방향 거리", "방향 거리" … ]
예를 들어 "E 5"는 로봇 강아지가 현재 위치에서 동쪽으로 5칸 이동했다는 의미입니다. 로봇 강아지는 명령을 수행하기 전에 다음 두 가지를 먼저 확인합니다.
주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
위 두 가지중 어느 하나라도 해당된다면, 로봇 강아지는 해당 명령을 무시하고 다음 명령을 수행합니다.
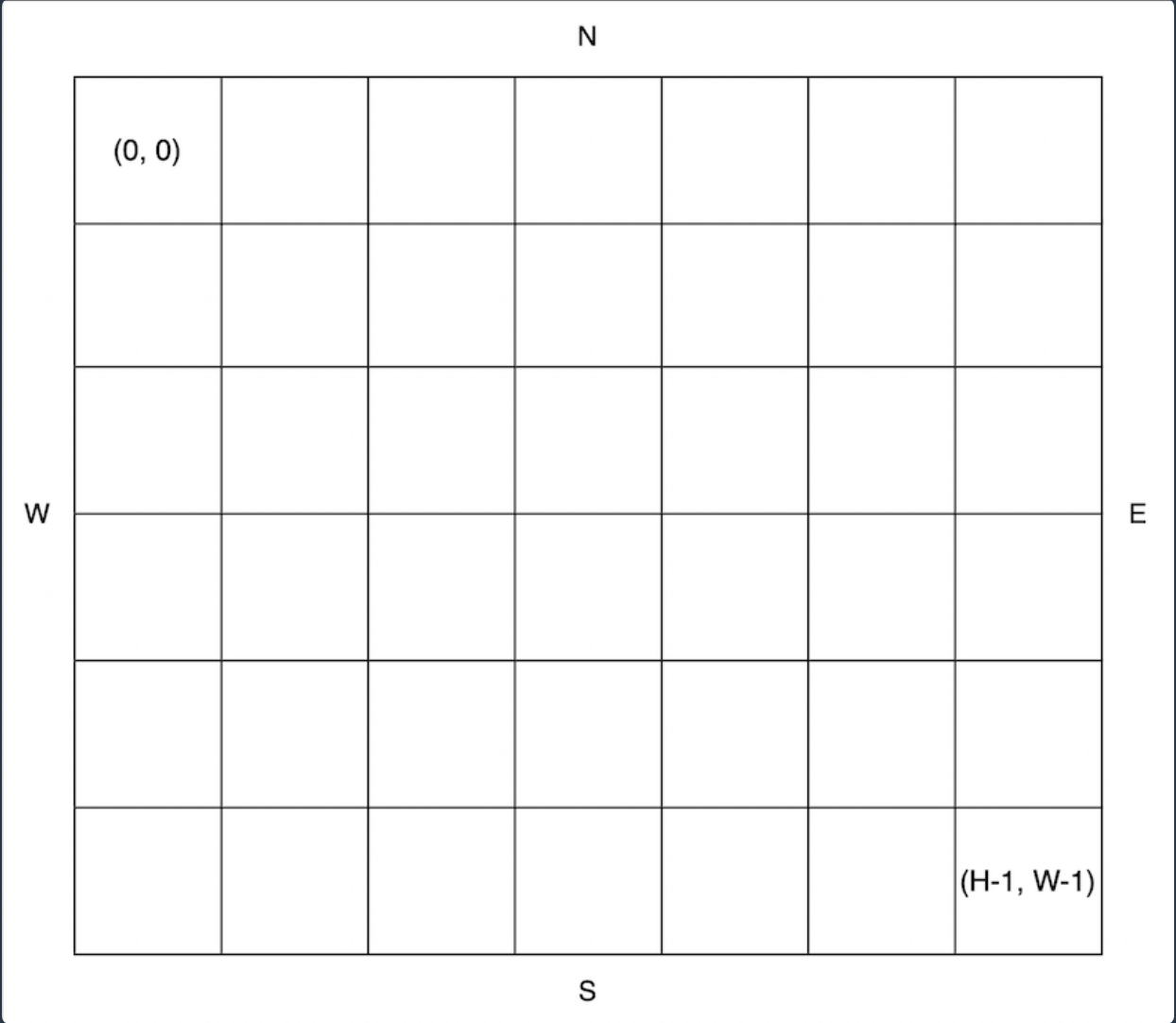
공원의 가로 길이가 W, 세로 길이가 H라고 할 때, 공원의 좌측 상단의 좌표는 (0, 0), 우측 하단의 좌표는 (H - 1, W - 1) 입니다.
공원을 나타내는 문자열 배열 park, 로봇 강아지가 수행할 명령이 담긴 문자열 배열 routes가 매개변수로 주어질 때, 로봇 강아지가 모든 명령을 수행 후 놓인 위치를 [세로 방향 좌표, 가로 방향 좌표] 순으로 배열에 담아 return 하도록 solution 함수를 완성해주세요.
제한 사항
- 3 ≤ park의 길이 ≤ 50
- 3 ≤ park[i]의 길이 ≤ 50
- park[i]는 다음 문자들로 이루어져 있으며 시작지점은 하나만 주어집니다.
- S : 시작 지점
- O : 이동 가능한 통로
- X : 장애물
- park는 직사각형 모양입니다. - 1 ≤ routes의 길이 ≤ 50
- routes의 각 원소는 로봇 강아지가 수행할 명령어를 나타냅니다.
- 로봇 강아지는 routes의 첫 번째 원소부터 순서대로 명령을 수행합니다.
- routes의 원소는 "op n"과 같은 구조로 이루어져 있으며, op는 이동할 방향, n은 이동할 칸의 수를 의미합니다.
- op는 다음 네 가지중 하나로 이루어져 있습니다.
- N : 북쪽으로 주어진 칸만큼 이동합니다.
- S : 남쪽으로 주어진 칸만큼 이동합니다.
- W : 서쪽으로 주어진 칸만큼 이동합니다.
- E : 동쪽으로 주어진 칸만큼 이동합니다.
- 1 ≤ n ≤ 9
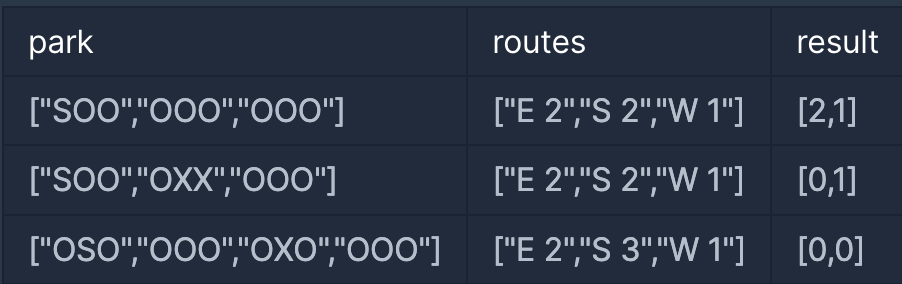
입출력 예
입출력 예 설명
입출력 예 #1
입력된 명령대로 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동하면 [0,0] -> [0,2] -> [2,2] -> [2,1]이 됩니다.
입출력 예 #2
입력된 명령대로라면 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동해야하지만 남쪽으로 2칸 이동할 때 장애물이 있는 칸을 지나기 때문에 해당 명령을 제외한 명령들만 따릅니다. 결과적으로는 [0,0] -> [0,2] -> [0,1]이 됩니다.
입출력 예 #3
처음 입력된 명령은 공원을 나가게 되고 두 번째로 입력된 명령 또한 장애물을 지나가게 되므로 두 입력은 제외한 세 번째 명령만 따르므로 결과는 다음과 같습니다. [0,1] -> [0,0]
제출 코드
function solution(park, routes) {
let current_row = 0;
let current_col = 0;
const park_height = park.length;
const park_width = park[0].length;
// 시작 위치 찾기
for (let i = 0; i < park_height; i++) {
for (let j = 0; j < park_width; j++) {
if (park[i][j] === "S") {
current_row = i;
current_col = j;
}
}
}
// 방향별 이동 정의
const direction_map = {
"N": [-1, 0],
"S": [1, 0],
"W": [0, -1],
"E": [0, 1]
};
// 명령 수행
for (let i = 0; i < routes.length; i++) {
const [direction, distance_str] = routes[i].split(" ");
const distance = Number(distance_str);
const [move_row, move_col] = direction_map[direction];
let next_row = current_row;
let next_col = current_col;
let can_move = true;
// 이동 가능 여부 미리 검사
for (let step = 0; step < distance; step++) {
next_row += move_row;
next_col += move_col;
// 공원 벗어나는지 확인
if (next_row < 0 || next_row >= park_height || next_col < 0 || next_col >= park_width) {
can_move = false;
break;
}
// 장애물 확인
if (park[next_row][next_col] === "X") {
can_move = false;
break;
}
}
// 문제가 없을 때만 실제 이동
if (can_move) {
current_row = next_row;
current_col = next_col;
}
}
return [current_row, current_col];
}