1. 논문의 주제와 목적, 학술적으로 기여하는 부분
주제: vibrotactile 기술과 관련된 기초적인 지식을 다룬다.
목적: vibrotactile display를 설계(design)하고자 하지만 햅틱 분야의 배경 지식이 없는 디자이너들을 위한 가이드라인을 제공한다.
학술적으로 기여하는 부분: 위 논문은 디자이너들이 Vibrotactile display를 설계하는데 필요한 지식, 대표적으로 vibrotactile perception 등을 제공하는 것에 의의를 둔다.
2. 논문의 디테일한 내용
1. Vibrotactile Perception
A. The Four-Channel Theory
Four-Channel Theory는 털이 없는(glabrous) 인간의 피부에 존재하는 4가지 주요 신경 채널을 보여준다. 각 채널은 서로 다른 기계 수용기(End Organ)에 연결되어 있으며, 각기 다른 종류의 자극에 반응한다. 그리고 각각의 신경 채널은 감지할 수 있는 주파수의 범위가 존재한다. 그 중에서도 PC 채널은 10~500Hz 범위 내의 고주파 진동 자극을 감지하는 데 특화되어 있다. 그리고 PC 채널은 다른 신경 채널과는 달리 spatial summation, temporal summation이라는 특징을 가지고 있다. 그리고 sensory adaptation이 빠르기 때문에 가해진 자극에 대해 빠르게 무뎌지며, 기계 수용기가 자극을 감지할 수 있는 피부 표면의 범위인 receptive field는 넓다는 것을 확인할 수 있다.
Receptive field가 작을수록 촉각 자극의 위치를 더 정밀하게 인식할 수 있다. Spatial resolution 높음. (인접한 두 자극을 개별적인 자극으로 인식할 수 있다.) 반대로 Receptive Field가 크면 자극의 정확한 위치 구분이 어렵다.
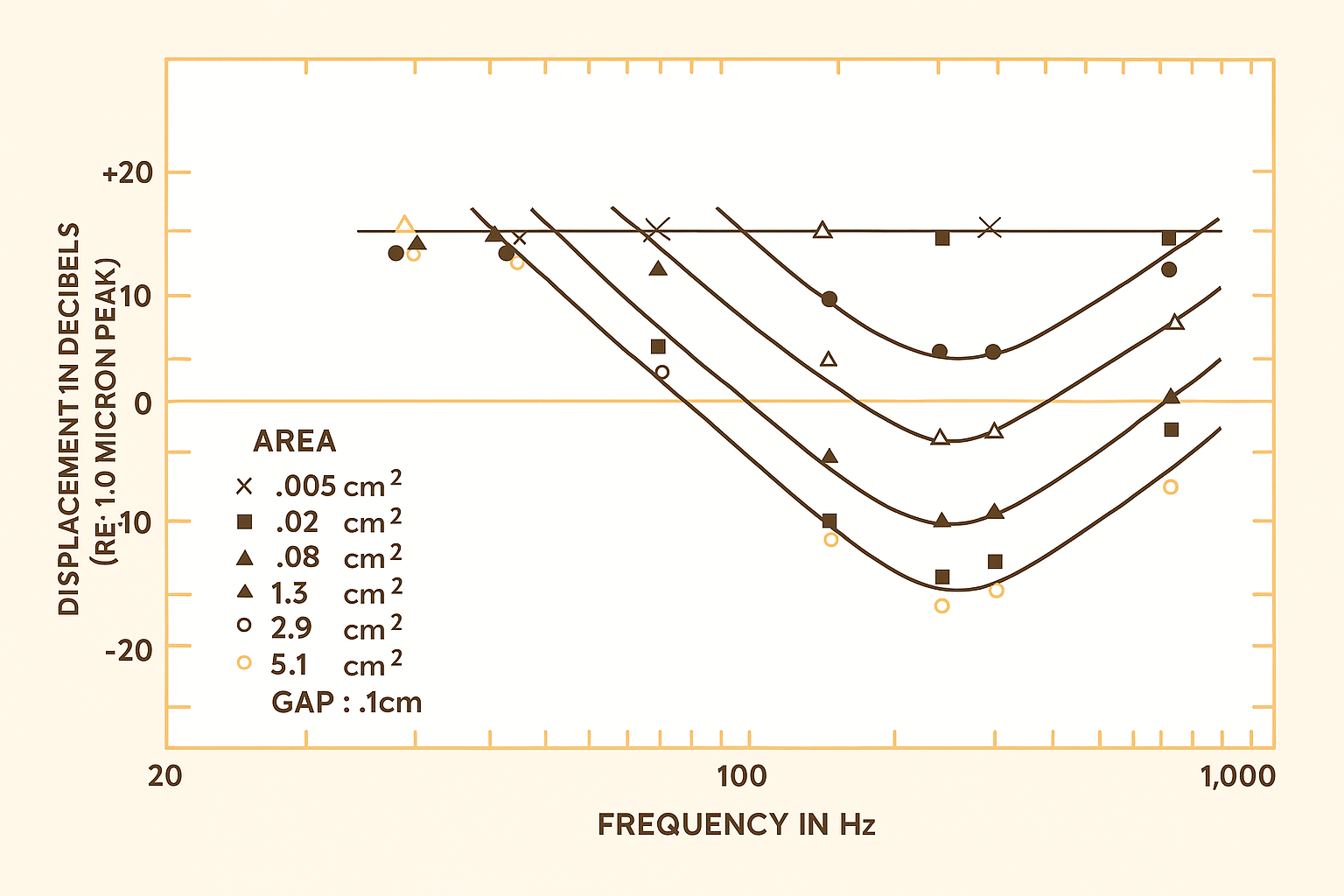
Spatial summation은 자극 접촉 면적이 넓어질수록 더 많은 수용기가 동시에 활성화 되어서 AL이 낮아진다는 것을 나타낸다. 그래프에서 0dB일 때는 진동변위가 1마이크로 미터일 때이다.
dB = 20log(측정된 진동변위/1마이크로미터)
Temporal summation은 진동 지속시간이 길어질수록 AL가 감소한다는 것을 나타낸다. 0dB일 때가 자극 지속시간이 1초일 때의 절대역치와 같은 절대역치 값이다.
1000ms부터는 진동 지속시간이 길어져도 saturation(포화)상태로 더 이상 AL 감소하지 않는다.
dB = 20log(AL/AL1s)
B. Single Body Site
‘Single Body Site’ 파트에서는 자극이 가해지는 위치가 하나인 상황을 고려한다. 절대역치(AL)는 사람이 자극을 인지하기 위해서 필요한 최소한의 자극의 세기이다. AL은 자극의 주파수에 강하게 의존한다. 그리고 Four-Channel Theory에서 봤던 각각의 신경 채널은 특정 주파수 대역에 특화되어서 해당 범위에서는 AL이 낮다. (공명주파수)
만약 30Hz 자극이 주어진다면 RA1 채널을 통해서 flutter(미세하게 떨리는 감각)를 감지할 수 있다. 150Hz와 같이 더 높은 주파수를 가진 진동 자극이 주어진다면 PC채널과 SA2 채널 모두 활성화될 수 있다.
두 자극간의 차이를 감지할 수 있는 최소한의 자극의 세기 차이는 JND(Just Noticeable Difference)라고 말한다. Difference Threshold라는 말과 혼용해서 자주 쓰인다. Weber’s law에 따르면 기준 자극의 세기가 커질수록 JND도 함께 커진다. (JND = wIr) 예를 들어서, 100g의 돌멩이가 있고 JND가 10g이라고 가정하자. 그렇다면 웨버 상수 w는 10%가 된다. 동일한 자극 조건에서 200g(기준자극)의 돌멩이가 있다고 한다면 웨버 상수는 동일하므로 JND는 20g이 된다.
Vibrotactile perception의 경우, weber’s law에 대해서 예외적인 경우가 나타날 수 있다. Weber’s law에 따르면, 기준 자극의 세기가 커지면 JND도 비례해서 커지므로 웨버 상수 w는 일정하게 유지되야 한다. 실제로 그래프를 보면 AL보다 큰 자극들(20부터)에 대해서는 웨버 상수 w가 거의 일정하게 유지된다. 하지만 기준 자극의 세기가 절대 역치(AL)에 가까운 영역(0~20dB)에서는 웨버 상수 w 값이 일정하지 않고 감소함을 확인할 수 있다. 이는 기준자극의 세기가 증가함에 따라서 일정한 비율로 JND가 함께 증가하지 않고 상대적으로 느리게 증가했음을 의미한다. 따라서 그래프 상에서 대략 0~20dB 구간의 기준 자극의 세기에서는 상대적으로 더 적은 자극의 차이만으로도 기준 자극과의 차이를 느낄 수 있다. 이처럼 Weber’s law는 near miss라 불리는 예외가 있을 수도 있다. 하지만, 대부분 맞기 때문에 장치를 디자인 하거나 DL를 찾는 실험을 수행할 때 Weber’s law 법칙을 사용할 수 있다.
(y축에서 분모는 기준 자극의 세기, 분자는 JND 따라서 웨버 상수w)
(dB = 20log(비교자극의 세기 / AL))
그리고, 인지된 자극의 세기와 실제 자극의 세기 사이의 관계는 Steven’s power law로 설명할 수 있다.
I는 실제 자극의 세기를 말하고, 좌항은 인지된 자극의 세기를 말한다. AL 이상의 I가 주어지면 우리는 steven’s power law에 따라 특정 자극의 세기를 인지하게 된다. e는 인지되는 자극의 세기의 증가 속도를 나타내며 0.35에서 0.86사이의 값을 갖는다. 그리고 e는 자극의 주파수와 같은 자극의 조건에 따라 달라질 수 있다. k는 절대값의 크기를 조절하는 스케일링 상수이다.
촉각, 시각, 청각 3가지의 민감도를 연속적인 두 자극을 구분하기 위해서 필요한 최소한의 시간 차이를 기준으로 표현할 수 있다. 이때 청각(0.01ms)이 제일 민감하고 그리고 촉각(5ms), 시각(25ms) 순으로 민감하다.
그리고 인간은 진동 자극의 진폭 변화로 인한 시간적 리듬의 차이를 잘 구분하고 인지할 수 있는 능력을 가지고 있다. 이러한 특성을 활용하면, 의미 있는 리듬을 가진 진동 자극을 디자인을 할 수 있다. 예를 들어 리듬 패턴에 따라 신호의 의미를 다르게 전달하는 추상적인 정보 전달에도 활용될 수 있다고 생각한다.
높은 주파수를 가지며, 부드러운 진동 감각을 만드는 사인파 함수가 있다고 하자. 이 사인파 함수에 낮은 주파수를 가진 envelop 함수를 곱하면 낮은 주파수의 거친 감각을 제공하는 진동 자극을 만들 수 있다. 이를 Amplitude modulation(진폭 변조)이라고 한다. Amplitude modulation은 특히 제한된 대역폭(bandwidth)을 가진 actuator(출력할 수 있는 진동의 주파수가 제한되어 있다.)를 사용할 때 유용하다. 따라서 sin파와 envelop 함수가 곱해져서 생성된 진동 자극은, 고주파인 sin파를 통해서 다양한 감각을 표현할 수 있고, envelop 함수를 통해 자극의 주파수를 actuator의 bandwidth 내에 있도록 할 수 있다.
s(t)=A(t)⋅sin(2πft), sin파는 범위가 -1에서 1이니까 하나는 +A(t), 다른 하나는 -A(t)
C. Multiple Body Site
Two point Threshold는 두 자극이 동시에 주어졌을 때, 개별 자극으로 느껴지기 위해서 필요한 최소한의 거리를 말한다.
(아래 두 개는 이해가 안 돼서 구글링함)
Point Localization Threshold는 두 자극을 순차적으로 각각 다른 위치에 주고, 피험자가 두 자극의 위치가 같은지 다른지를 판단하게 하여 측정한다. 여기서 구별 가능해지는 최소 거리가 Point Localization Threshold이다.
Grating Orientation Discrimination Threshold는 피험자에게 평행한 선 형태의 격자판을 피부에 누른다. 그 후 피험자에게 격자의 방향이 수직인지 수평인지 판별하도록 요청한다. 간격을 점차 좁히면서, 정확히 판별할 수 있는 최소 간격을 찾고 이 간격을 Grating Orientation Discrimination Threshold라고 한다.
일련의 tactors를 사용해서 몸 위에서 자극이 연속적으로 움직이는 듯한 촉각 착각(Perceptual illusions)을 만들 수 있다. 대표적인 예시로 cutaneous rabbit이라는 Perceptual illusions이 있다. tactor1에서 세번의 짧은 진동(short pulses)를 주고, 약간의 시간 차이를 두고 tactor2, 이어서 tactor3에서도 동일한 자극을 순차적으로 가하면, 사용자는 tactor1에서 tactor3 위치까지 토끼가 올라가는(뛰어가는) 듯한 느낌을 준다.
그외에도 phantom sensation이라는 Perceptual illusions이 있다. 이는 두 개의 tactor 사이에서 만들어지는 Perceptual illusions으로, 각각의 tactor가 전달하는 자극 세기를 조절함으로써 실제로는 직접적인 자극을 가하지 않는 중간 지점에서도 자극이 느껴지는 착각을 유도할 수 있다.
Tactor는 피부에 직접적인 자극을 주는 인터페이스.
D. Active and Passive Touch
수동적인 터치와 능동적인 터치를 구분해서 생각하는 것은 중요하다고 한다.
수동적인 터치는 사용자의 능동적인(자발적인) 움직임 없이 촉각 자극이 사용자에게 전달되는 것이다. 대표적인 예시로 핸드폰에 전화가 올 때 발생하는 진동을 들 수 있다. 반면 능동적인 터치는 사용자의 움직임에 반응(response)하여 촉각 자극이 발생하는 상황을 가리킨다. 대표적인 예시로 사용자가 터치 스크린을 눌렀을 때 발생하는 진동 피드백은 사용자의 행동에 반응한 능동적인 터치에 해당한다.
2. Vibrotactile Actuators
A. Linear Electromagnetic Actuators
Vibrotactile 자극을 만들기 위해서 가장 흔하게 사용되는 물리적 현상으로 전자석(electromagnet)이 있다. 전자석에 전류를 흘려주면 자기장이 만들어지고 전류를 끊으면 자기장이 사라지는 일시적인 자석이다. 자기장을 형성하는 전자석 주변에 강자성체나 영구자석을 배치하면 물리적인 방향이나 전류의 방향에 따라서 자석이 끌어당겨지거나 밀려나는 힘을 받게 된다. 이를 통해 촉각 진동 (tactile vibration)을 만들어낼 수 있다. 그리고 이러한 원리는 스피커에도 적용이 된다.
참고로 앞에서 전자석과 함께 언급한 원리는 스피커에도 적용이 된다고 한다. 공기의 진동을 만들어서 소리를 전달하는 방식이다.
이러한 원리를 적용하여 tactile 진동을 만들어내는 actuator로, solenoid와 voice coil이 있다.
Solenoid는 움직일 수 있는 강자성체를 코일이 감싸는 구조이다. 상업적인 애플리케이션으로 널리 사용되고 다양한 크기로도 만들어진다. 다만 전류를 끊으면 코일은 자기장을 만들 수 없기 때문에 강자성체를 붙잡는 힘이 없어진다. 따라서 강자성체를 시작 위치로 돌려놓기 위해서는 spring이 필요하다. 논문에서는 spring의 static stiffness (뻣뻣함 정도)와 공명 주파수에 반드시 주의를 해야한다고 강조한다. 실제로 Solenoid actuator(시스템 전체)에 공명 주파수 대역의 전압을 제공한다면 적은 전압으로도 큰 진동 출력을 얻을 수 있기 때문이다.
Solenoid의 단점으로는 두 가지가 있다.
첫 번째로는 전달되는 감각이 일관성이 없을 수 있다. 왜냐하면 강자성체에 가해지는 힘은 자기장 영역 안에서의 위치에 의존하기 때문이다. 상대적으로 코일 안에서의 자기장이 가장 강하고, 위치가 벗어날수록 자기장 세기는 약해지므로 자극 강도가 위치에 따라 달라질 수 있다.
두 번째로 Solenoid는 작동 중 발열이 발생할 수 있다는 단점이 있다.
Voice coil은 움직일 수 있는 영구자석을 코일이 감싸는 구조이다.
voice coil actuator은 Solenoid와 달리 출력되는 진동의 세기가 일관되고 모델링이 쉽다는 장점이 있다. Voice Coil 구조는 설계 방식에 따라 다양한 형태가 존재한다.
첫 번째는 Bushing(부싱)이 내장된 구조로, 편리하지만 정지 마찰(static friction)이 커서 약한 진동을 잘 전달하지 못하고 진동 감각이 왜곡될 수 있다.
두 번째는 Ball Bearing(볼 베어링)을 사용하는 방식으로 마찰이 적지만, 베어링 자체의 움직임에서 발생하는 기생 진동(parasitic vibration)이 문제를 일으킬 수 있다. 기생 진동은 의도하지 않았지만 부수적으로 발생하는 불필요한 진동을 의미한다.
마지막으로, bushing이 없는 구조는 디자이너가 직접 움직이는 부품들을 정렬해야 하기에 훨씬 복잡하다. 그리고 영구자석과 같이 움직이는 요소를 중심으로 돌려보내기 위해서 스프링을 필요로 한다.
그외에도 다양한 voice coil actuators이 존재한다. 예를 들어, EAI (Engineering Acoustics Inc.)는 피부에 직접 접촉하여 진동을 전달하는 C2 tactor가 있으며, 250Hz의 공진 주파수를 갖는다. EAI는 동일한 제조 회사에서 100Hz보다 낮은 주파수의 진동을 만드는 tactor 또한 만들었다. 그 외에도 Haptuator, Linear resonant actuator, 소형 전자기 진동 장치인 tactaid도 있다.
Tactile Labs는 50Hz 이상의 주파수의 진동을 만드는데 최적화된 Haptuator를 만들었다. Haptuator는 손으로 쥐는 장치에 삽입되도록 설계 되었다. Linear resonant actuators(LRAs)는 voice coil 기반의 actuator로 200Hz의 공명 주파수를 가진다. 마지막으로 AEC가 만든 Tactaid는 소형 전자기 진동 장치로, 현재는 단종된 상태다.
이처럼 전자기력을 이용하여 선형으로 진동하는 actuators에는 다양한 구조와 특성을 가진 actuators가 존재한다. 따라서 만들고자 하는 장치의 필요에 따라 더 적합한 actuator를 선택할 수 있다.
B. Rotary Electromagnetic Actuators
DC모터는 전압이나 전류가 가해지면 전자기력을 통해 회전을 하게 된다. 만약 회전자(코일)의 무게 중심이 중심축을 벗어나 있다면, 회전할 때 원심력(radial force)가 발생하고 이를 통해서 진동이 만들어진다. 비균일 질량 분포를 가지는 회전자가 있는 DC 모터를 ERM(Eccentric Rotating Mass)이라고 한다. ERM 모터에 가하는 전압이 세기가 세지면 회전하는 속도가 빨라져서 강한 진동이 느껴지고, 전압의 세기가 약해지면 회전하는 속도가 느려져서 약한 진동이 느껴진다. 이때 DC 모터에 가해지는 전압의 세기는 정해진 (주파수, 진폭)의 한 쌍과 1:1로 맵핑된다. 다시 말해서, DC 모터가 출력하는 진동의 주파수와 진폭을 임의로 설정하지 못한다. 그리고 약한 전압을 DC모터에 가해서는 내부적인 static 마찰 때문에 회전하지 못하며, 특정 진동 신호를 만들어 내는데까지 시간 지연이 될 수 있다.
(radial force: 회전 운동 시스템에서 중심을 향하거나 중심에서 나가는 방향으로 작용하는 힘이다.)
ERM(Eccentric Rotating Mass) 모터는 구조에 따라 여러 종류로 나뉘는데.
shafted motors, encapsulated cylindrical motors, shaftless motors로 나뉜다. 이들 모두 구조가 단순하고 신뢰성이 높지만, 주파수와 진폭을 임의로 조절하지 못한다는 제약이 있다.
C. Nonelectromagnetic Actuators
압전 효과(piezoelectric effect)를 이용해서 vibrotactile sensation(촉각 자극)을 만들 수 있다. 압전 효과는 압력이 가해졌을 때 전기가 생성되는 현상으로, 이 효과는 가역적(reversible)이기 때문에 정방향 압전 효과와 역방향 압전 효과가 있다. 정방향 압전 효과는 압력을 가함으로써 전하가 생성되는 효과이고, 역방향 압전 효과는 전압을 가하면 기계적인 변형을 얻을 수 있는 것을 말한다. 따라서 정방향 압전 효과를 이용하면 압전 소재(piezoelectric material)을 센서로서 이용이 가능하다. 촉각 자극(vibrotactile display)를 만드는데 역방향 압전 효과가 사용된다. Ceramic piezoelectric actuators가 역방향 압전 효과를 이용하는 대표적인 예시이다.
다층 구조로 disk 형태를 가진 ceramic piezoelectric actuators가 사용된다. 전압과 같은 입력이 들어오면 매우 빠르게 반응하며 임의의 진동 파형을 만들 수 있다. 단, 100 V 이상의 전압을 필요로 한다.
압전 소재(piezoelectric material): 압전 효과를 나타내는 물질
전압: 전하를 이동시키는 전기적 압력,
전류: 전하가 흐르는 양, 시간당 흐르는 전자 수
최근에는 압전 효과를 이용하는 EAP(electroactive polymer) actuators가 만들어졌다. 논문에는 언급되어 있지 않지만 electronic(전자식) type과 ionic(이온형) type이 있다. electronic(전자식) type은 반응이 빠르고 큰 힘을 발생시키지만, 높은 전압을 필요로 한다. 반면에 ionic(이온형) type은 낮은 구동 전압으로도 큰 변형(piezoelectric material)을 만들어 낼 수 있다.
형상 기억 합금(SMA, Shape Memory Alloy) actuators는 온도를 높이면 합금의 모양이 변형되고, 온도를 낮춰주면 다시 원래 모양으로 되돌간다. SMA actuators는 소형화할 수 있고, 매우 강한 힘을 낼 수 있다. 하지만 반응 속도가 느리고, SMA actuators가 생성 가능한 진동의 주파수가 낮다는(10Hz보다 작음) 단점이 있다. 그리고 에너지 소비도 많다.
공압 액추에이터(Pneumatic actuators)는 압축된 공기의 힘을 이용해서 촉각 자극을 생성한다. 피스톤 운동, 공기 주입(air injection) 또는 흡입(suction) 등의 방식으로 피부에 자극을 전달할 수 있다. 단점은 대역폭이 낮으며, 별도의 공기펌프 장치가 필요하다.
3. Vibrotactile Displays
A. Monolithic Vibrotactile Displays (Vibrating an entire rigid object)
Monolithic Vibrotactile Displays는 하나의 단단한 인터페이스(물체) 전체를 진동시키는 vibrotactile display이다. Monolithic Vibrotactile Displays로 진동을 주기 위해서는 2가지 주요 조건이 필요합니다. 첫 번째로 actuator는 반드시 진동시킬 물체의 프레임에 단단히 부착되어야 한다. 그렇지 않다면 진동 자극이 사용자에게 효과적으로 전달되지 않을 것이다. 두 번째는 물체(인터페이스)가 충분히 단단해야 한다. 유연한 재질일 경우 actuator 근처에서 구부러질 수 있고, 이는 진동이 장치의 넓은 영역으로 퍼지는 것을 방해할 수 있다.
Actuator의 크기와 입력 세기(activation level)을 고정했을 때, 만들어지는 진동의 세기는 물체의 질량에 반비례한다. 즉 전체 인터페이스의 무게가 무거울수록 진동 효과는 약해진다. 따라서 디자이너들은 장치의 무게를 줄이는 전략을 고려해야 한다.
(입력 세기(activation level)로는 actuator에 가해지는 전압/전류 등..)
B. Localized Vibrotactile Displays (Vibrating one or more small zones)
Localized Vibrotactile Displays는 전체가 아닌 인터페이스 상의 하나 혹은 그 이상의 일부 작은 영역만을 진동시키는 인터페이스이다.
Localized Vibrotactile Displays를 설계하는데 4가지를 고려해야 한다.
첫번째로 actuator와 시스템 본체 간에는 가볍고 유연한 연결 구조가 필요하다.
(시스템 본체는 actuator가 붙는 물체)
두번째로는 벨트 가죽과 같은 뻣뻣한 소재는 진동을 제대로 전달하지 못하기 때문에 신축성 있는 천이나 탄력있는 밴드를 시스템 본체로 사용하는 것이 진동 전달에 효과적이다.
세번째로 전선은 피부에 감각을 주거나 움직임을 방해하지 않도록 해야하며, ultraflexible stranded cables을 사용하는 것이 좋다.
마지막으로 해당 시스템은 피부에 부드럽게 밀착되도록 설계되어야 한다. 특히 날카로운 가장자리나 불편함을 주는 표면이 없도록 주의해야 한다. 특히 착용형 시스템(장치)는 사용자의 신체 크기나 움직임이 다양하므로 재배치가 가능한 가능한 tactors (자극 위치를 유연하게 조절할 수 있도록 설계된 actuator)가 가장 좋은 해결책이다.
4. Applications: Physical Information Delivery
A. Material Properties
물리적 정보에는 물체의 형상, 질감, 강도, 온도, 힘 등이 포함된다.
가상환경에서 현실성을 높이기 위해, 이 물리적 정보들을 진동 자극으로 전달할 수 있다. 이를 구현하기 위해서 grounded dc motor나 linear voice coil이 사용된다. 물리적 정보를 진동을 통해서 전달하는 것은 펜과 같이 손으로 잡는 인터페이스가 물리적 상호작용의 느낌을 더해준다.
(Application: 사용 목적 또는 기능 전체 (예: 가상 수술, 원격 조작))
B. Contact Location
물리적인 정보를 전달하는 display 중에서 Virtualtactile display가 있다.
Virtualtactile display는 가상 환경에서의 접촉이 신체의 어느 부위에 발생했는지를 사용자에게 전달하는 데도 쓰일 수 있다. 대표적인 예시로 TactaVest를 논문에서 소개한다. TactaVest는 군사 훈련 시뮬리에션에서 사용되어 가상의 물체와의 충돌 부위를 진동으로 알려준다.
5. Applications: Abstract Information Delivery
추상 정보 전달은 진동이나 압력과 같은 촉각 자극을 신호처럼 사용해서, 사용자가 의미를 해석하게 하는 것이다. 시각이나 청각을 사용할 수 없거나 감각 기능이 저하된 경우에 추상적 정보 전달이 유용하다. 혹은 사용자의 시각, 청각 정보가 이미 과도하게 사용되고 있는 상황에서도 필요로 합니다.
논문에서는 다양한 추상 정보 전달의 실제 응용 사례를 소개한다.
추상 정보 전달을 통해 시각 장애인들이 글을 읽는데 도움을 주는 optacon, 음성을 다수의 진동으로 변환하여 정보를 전달하는 청각 장애인을 위한 vocoder, 그리고 벨트 등에 부착된 tactors를 통해 방향을 진동으로 안내하는 네비게이션 시스템, 차량 운전 중 충돌 위험(위험한 위치)이 감지되면 해당 위치를 반영해서 특정 위치에 진동 자극을 제공하는 사례도 있다.
개인적으로 흥미로웠던 예시는 추상 정보를 제공하는 (haptic icons)/tactile icons였다. 이러한 아이콘은 걸려오는 전화가 긴급한 전화인지 또는 누구에게서 온 전화인지와 같은 추상적인 정보를 진통 패턴으로 전달한다. 관련 연구에 따르면 사람은 80개 이상의 tactile icons를 구별할 수 있다고 한다. 그리고 진폭, 주파수, envelope, 그리고 리듬과 같은 요소들을 조합하여 tactile icon을 디자인할 수 있다.
진동뿐 아니라 청각이나 시각 등의 감각을 함께 사용하여 추상적인 정보를 제공하는 multimodal icons도 있다.
이전 아이디에이션에서 내가 제안했던 차량 다이얼 기어에 햅틱 기술을 적용한 아이디어도 이러한 추상 정보 전달에 해당한다고 볼 수 있다. 사용자가 진동 자극을 신호로 받아서 의미를 해석하도록 설계한 점에서 abstract information delivery의 한 형태에 해당한다.
6. Applications: Multimedia
마지막으로는 다중매체에 촉각 자극을 적용하는 경우를 살펴보겠습니다.
영화 그리고 게임과 같은 Multimedia에 촉각 자극을 결합함으로써 보다 현실감 있는 경험을 제공할 수 있다. 예를 들어, 영상과 소리에 맞춰서 진동을 전달하는 4D 영화가 대표적인 사례이다.
이러한 Multimedia 컨텐츠에 촉각 자극을 결합하기 위해서는, 진동 자극을 설계해야 하며, 보통 이를 프로그래밍하거나 수동으로 하나씩 설계를 해야한다. 그러나 소프트웨어 툴을 사용해서 촉각 자극을 설계 할 수도 있으며 이러한 제작 과정을 이를 Authoring이라고 한다.
3. 논문의 결과 및 분석 (Discussion)
해당 논문은 실험을 통해 새로운 개념을 제안하지 않는다. 대신 vibrotactile perception에서부터 actuators, displays, 물리적 정보전달, 추상적 정보 전달 (presentation of physical and abstract information), and 멀티미디어 응용 사례(applications to multimedia)에 이르기까지 vibrotactile 기술 전반에 대한 개요를 제공한다. 앞서 말했듯이 tactile rendering system을 설계하려는 디자이너들에게 기초적인 지식 기반을 제공한다.
4. 논문 평가 및 보완점 분석
Temporal summation을 설명하는 부분에서 Saturation(포화)에 대한 개념적 설명이 있었으면 더 좋지 않았을까라는 생각을 한다.
논문 출처
