✅ 오늘 한 일
- Project BCA
- Udemy Unity Lighting 강의 수강
🎮 Project BCA
로봇 팔 모델 수정
Animation Rigging Package 고려 > 알아보니 부적합 > 모델도 기물을 적절하게 집기 힘든 구조 > 모델을 수정하고 축을 rotation만으로 제어하기로
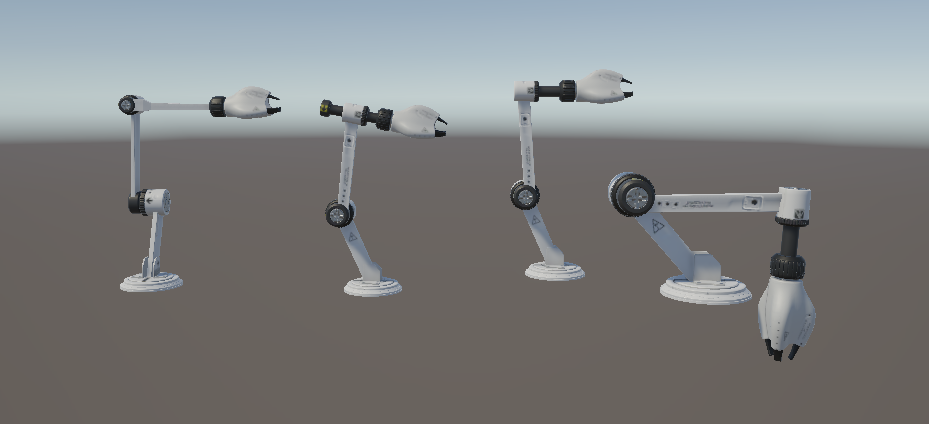
로봇 팔이 체스 기물을 잡을 수 있도록 모델을 여러 번 수정해보았으나,
어떻게 해야 모든 위치에서 직각으로 집을 수 있는지 원리를 파악하지도 않고 무작정 하다보니 결국 모두 실패.
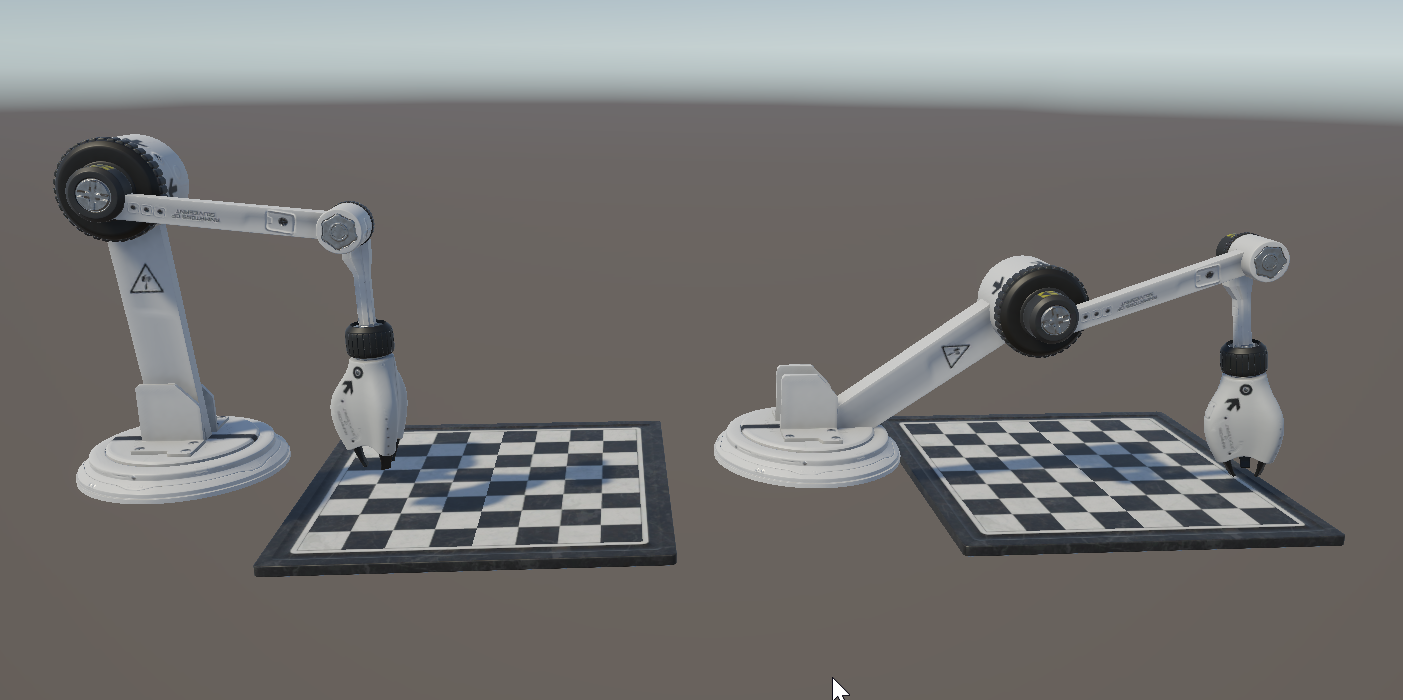
로봇 팔을 중심으로 원호를 그리며 생성되는 단면은 모두 동일
가장 가까운 e8~g8과 가장 먼 a1만 갈 수 있으면 나머지는 연속적으로 가능 (아마도)

https://www.youtube.com/watch?v=OHazT3y0WpI
실제 구현된 체스 로봇 참고
축 3개면 대충 될 것으로 생각
기존 모델에서 마지막 회전축의 방향을 돌려 원하는 축으로 만듦, 3축 완성
하지만 손이 길어서 움직였을 때 각도도 부자연스럽고, 멀리 가지도 못함
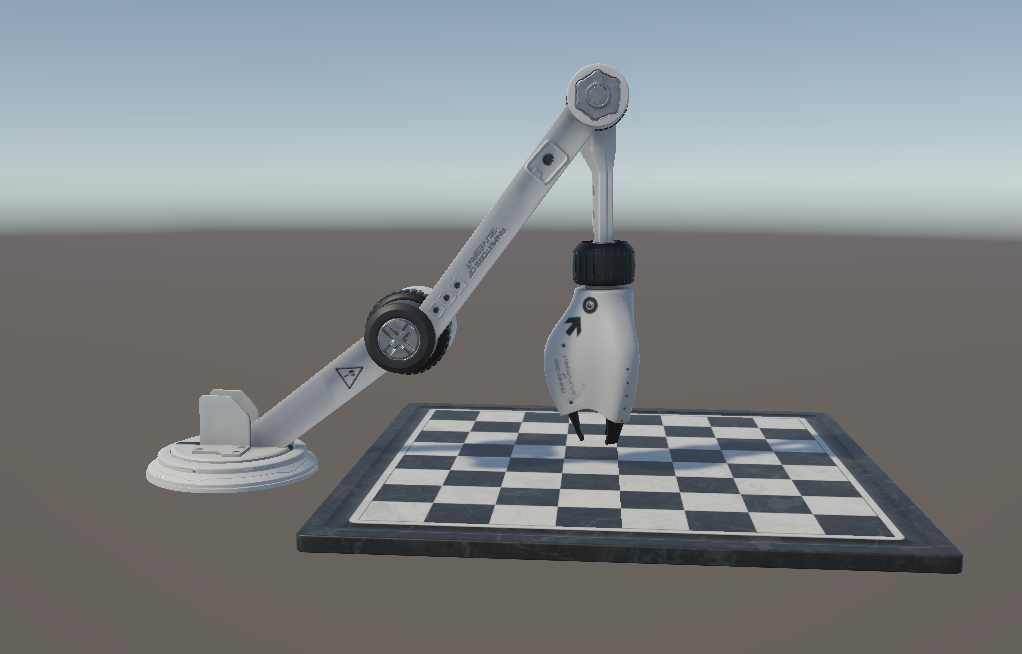
이를 해결하기 위해 손목 부분을 짧게 했더니 디자인적으로 이상해보였음
아래 부분 크기를 키워 해결

모델링은 끝
제어할 코드 나중에 만들기
🎞️ Udemy Course : Unity Lighting
섹션 1.8 ~ 1.10
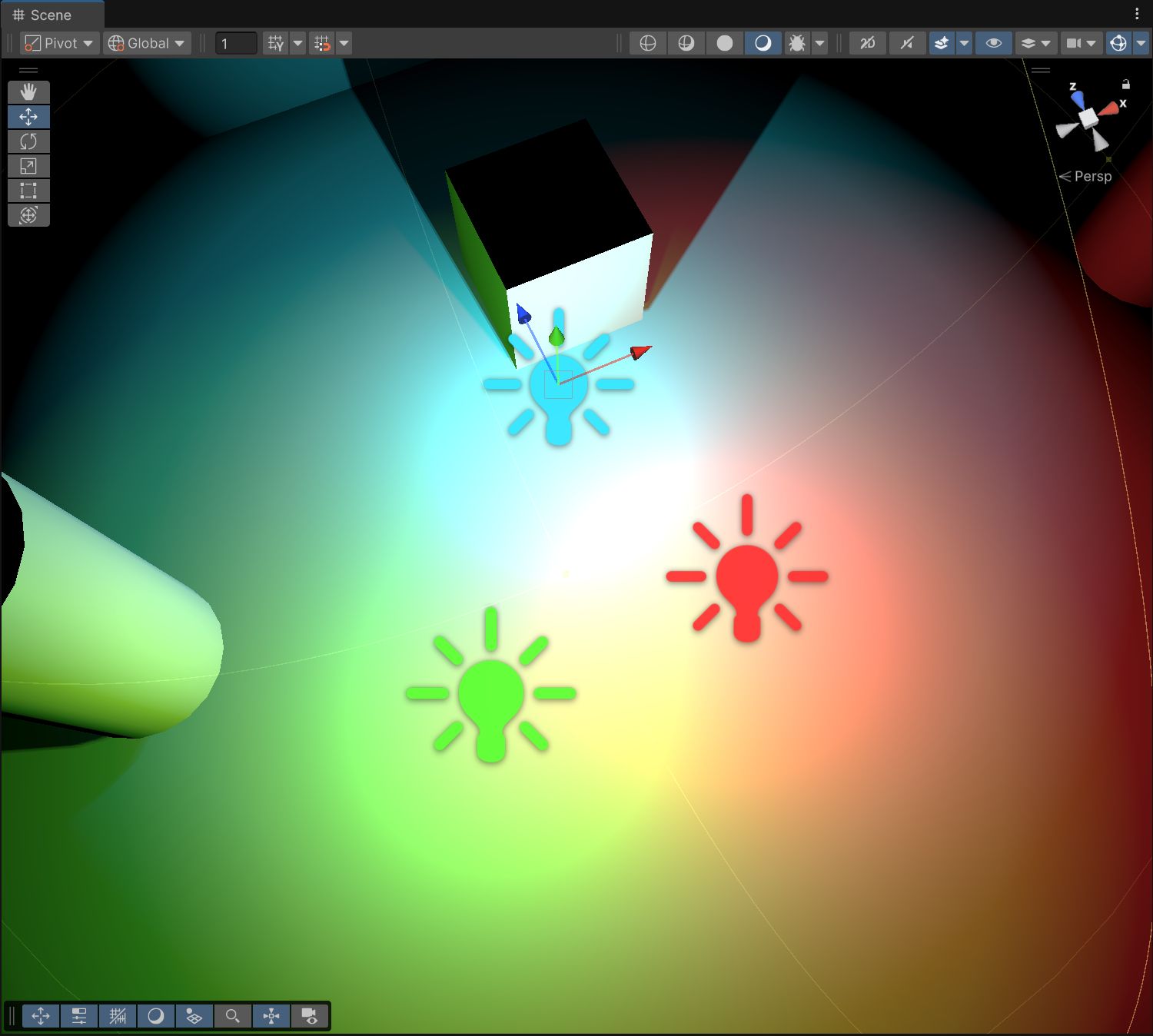
point light는 중심에서 가장 밝고 외곽으로 갈 수록 영향을 못 미침
색은 그냥 섞이는게 아니라 강도도 더해짐
게임 오브젝트 지금 보고 있는 곳으로 가져오기 : GameObject > Align with view (Ctrl + Shift + F)
씬 뷰 좌측 상단 Global을 Local로 바꾸면 해당 오브젝트이 rotation한 대로 축이 변경됨
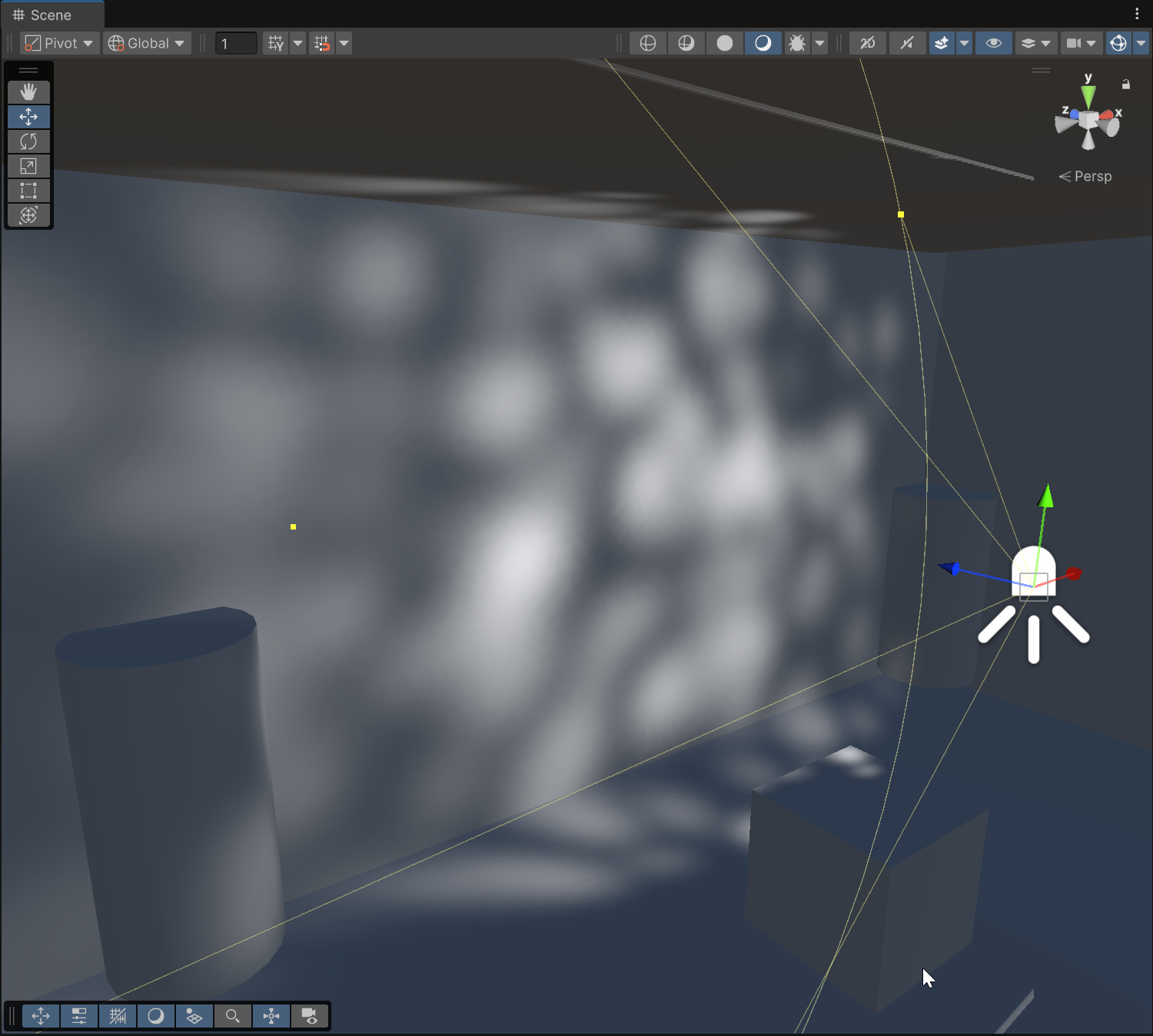
라이트에 쿠키 넣을 때 텍스쳐 설정
- Texture Type : Cookie
- Light Type : 사용할 빛 종류
- Alpha Is Transparency : 체크
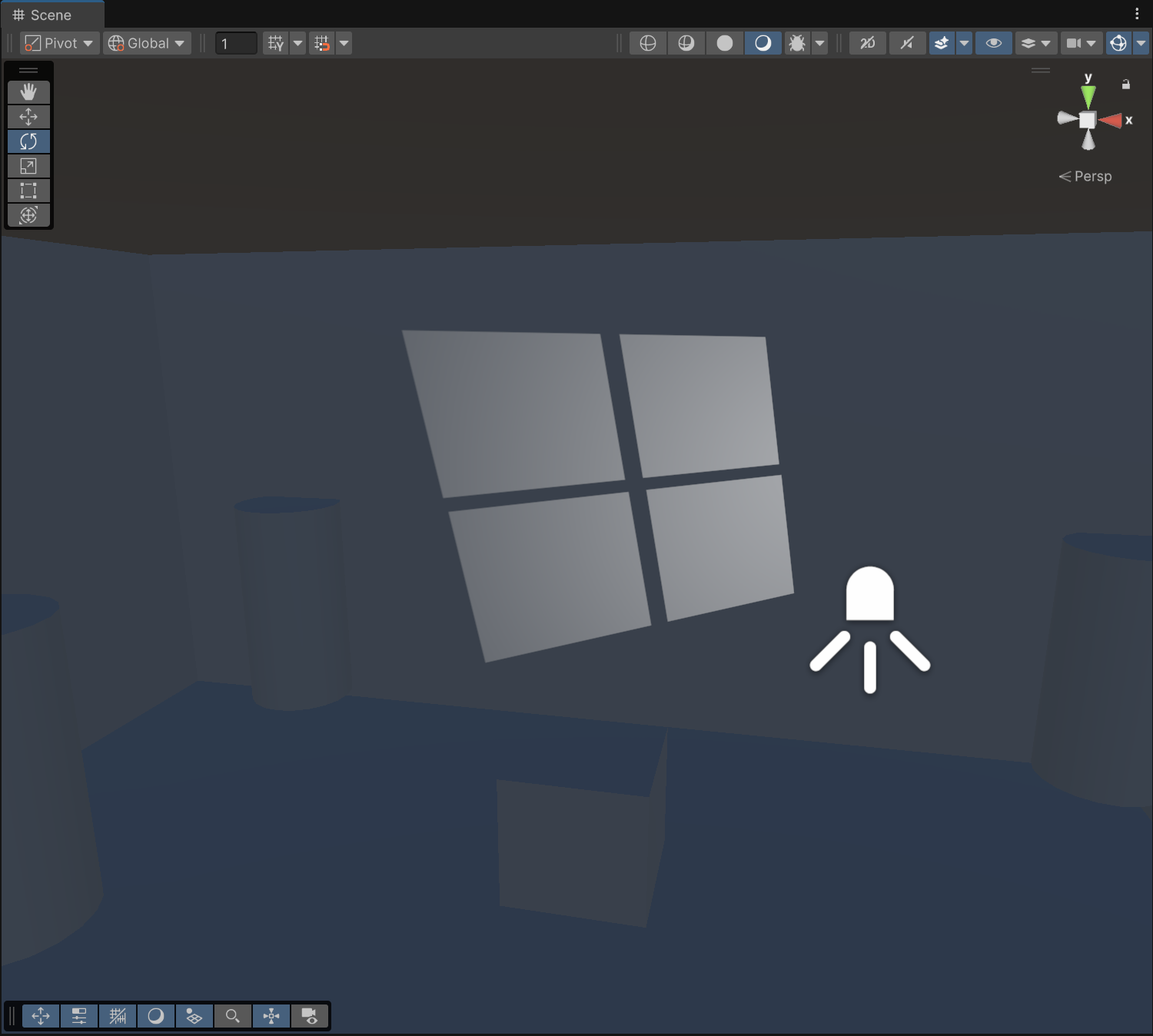
- Wrap Mode : Spot Light 쓸 때만 Clamp
- 텍스쳐마다 가끔 Alpha Source를 바꾼다던가 Remove PSD Matte를 해야 한다던가 하는 경우도 있는듯