스케줄링의 목적 및 기준
목적
- 공정성
- 모든 프로세스들이 공평하게 취급되어야 함
- 어떤 프로세스도 무한대기 상태가 되어서는 안됨
- 처리 능력의 최대화
- 단위 시간 내에 최대한의 프로세스들이 수행될 수 있도록 스케줄링 되어야 함
- 응답 시간의 최소화
- 대화식 사용자들에 대한 응답 시간을 최대한 빠르게 해야 함
- 예측 가능
- 주어진 작업은 시스템 내부의 부하(load)에 상관없이 거의 같은 비용, 같은 시간 내에 수행되어야 함
- 오버헤드(overhead)의 최소화
- 자원 사용의 균형 유지
- 스케줄링 메커니즘들은 해당 시스템의 자원들을 쉬게 해서는 안되며, 프로세스들이 사용되지 않는 자원들을 사용하도록 해야 함
- 응답과 이용 간의 균형 유지
- 실시간 시스템
- 응답 시간을 빠르게 하기 위해 충분한 자원을 갖게 되어 자원의 활용도 낮아짐
- 다른 시스템
- 경제성 때문에 효과적인 자원 활용이 더 중요시 됨
- 실행의 무한한 지연을 피할 것
- 무한 지연은 교착 상태 만큼 나쁠 수 있음
- 이를 피하기 위한 방법은 에이징(aging)인데, 이것은 프로세스(infinite postponement)가 오래 기다릴수록 그 우선순위를 높이는 것
- 우선순위제의 실시
- 주요 자원들을 차지하고 있는 프로세스에게 우선권을 주게 함
- 하위 순서를 가진 프로세스가 주요자원을 차지하고 있다고 할지라도 그 자원이 다른 프로세스에게 양보될 수 없다면 스케줄링 기법은 그 프로세스로 하여금 주요자원을 양보하기 보다는 우선적으로 처리토록 함
- 좀더 바람직한 동작을 보이는 프로세스에게 더 좋은 서비스를 제공함
- 예: 페이지 부재(page fault)율이 낮은 프로세스들
- 과중한 부하를 완만히 줄임
- 부하가 과중하면 새로운 프로세스들이 더 생성되지 않도록 하여 과다한 부하를 방지하거나 모든 프로세스들에 대한 서비스를 적당히 줄임으로써 과다한 부하를 감소시킴
-> 이러한 많은 목적들은 서로 상충되는 결과를 발생함으로써 스케줄링을 복잡하게 만드는 원인이 될 수 있음
기준
언급된 스케줄링의 목적들을 실현하기 위한 스케줄링 기법은 아래와 같은 사항들을 고려해야 함
- 입출력 위주의 프로세스인가?
- 연산 위주의 프로세스인가?
- 프로세스가 일괄처리형인가 대화형인가?
- 긴급한 응답이 요구되는가? (실시간 처리 시스템 vs. 일괄처리 시스템)
- 프로세스의 우선순위
- 프로세스가 페이지 부재를 얼마나 자주 발생시키는가?
- 높은 우선순위를 지니는 프로세스에 의해서 얼마나 자주 프로세스가 선점(preempted) 되는가?
- 자주 선점되는 프로세스들은 보다 좋지 않은 대우를 받게 한다.
- 오버헤드 증가시키기 때문
- 프로세스가 받은 실행 시간은 얼마나 되는가?
- 프로세스가 완전히 처리되는 데 필요한 시간은 얼마나 더 요구되는가?
- 모든 프로세스의 평균 대기 시간을 최소화하기 위하여 최소의 실행 시간을 남긴 프로세스부터 먼저 실행시킴
- 그러나 각 프로세스의 처리완료를 위해 필요한 시간을 정확히 예측하기가 어려운 일임
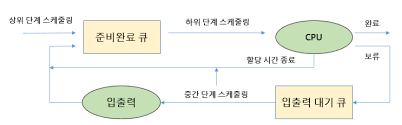
단계별 분류
1. 상위 단계 스케줄링(high level scheduling)
- 작업 스케줄링(Job Scheduling)이라고도 함
- 어떤 작업에게 시스템의 자원들을 차지할 수 있도록 할 것인가를 결정
- 어떤 작업들이 그 시스템에 들어오는 것을 승인하는 것(승인 스케줄링, admission scheduling)
2. 중간 단계 스케줄링(intermediate level scheduling)
- 어떤 프로세스들에게 중앙처리장치를 차지할 수 있도록 할 것인가를 결정
- 시스템 전체의 성능향상을 위하여 허용되는 시스템 부하(load) 내에서 짧은 순간에 프로세스들에 대한 일시적인 활동의 중단 및 재개를 수행
- 그 시스템에서의 작업 승인과 이들 작업들에 대한 중앙처리장치 할당 사이에서 버퍼(buffer) 역할을 함
3. 하위 단계 스케줄링(low level scheduling)
- 중앙처리장치가 다음 프로세스를 받아들일 수 있을 때 어떤 준비완료(ready) 프로세스에게
CPU를 차지할 수 있도록 할 것인가를 결정하고 이 프로세스에게 할당해 줌- 하위 단계 스케줄링은 디스패처(dispatcher )에 의해서 매초 여러 번 작동(디스패처는 주기억
장치 내에 항상 적재되어 있어야 함)
방법 • 환경별 분류
1. 선점/비선점(preemptive/non-preemptive) 스케줄링
비선점
- 하나의 프로세스에 중앙처리장치가 할당되면 그 프로세스의 수행이 끝날 때까지 중앙처리장치는 그 프로세스로부터 빠져 나올 수 없음
- 짧은 작업들이 긴 작업들에 의해서 기다리게 되지만, 모든 프로세스들에 대한 대우는 공정
- 도중에 높은 우선순위의 작업이 입력되더라도 대기 중인 작업들이 영향을 받지 않으므로 응답 시간을 쉽게 예측할 수 있음
선점
- 하나의 프로세스가 중앙처리장치를 차지하고 있을 때 다른 프로세스가 현재 수행 중인 프로세스를 중지시키고 자신이 중앙처리장치를 차지할 수 있는 경우
- 높은 우선순위를 가진 프로세스들이 빠른 처리를 요구하는 시스템에서 유용
- 실시간 시스템에서 인터럽트가 받아들여지지 않음으로써 발생하는 결과는 대단히 좋지 못한 것
- 대화식 시분할 시스템에서는 선점 스케줄링으로 빠른 응답 시간을 보장해 주는 것이 중요함
- 문맥 교환(context switching) 등으로 인한 오버헤드를 초래
- 선점을 효과적으로 하기 위해서는 많은 프로세스들이 주기억장치 내에 있어야 함
- CPU가 사용 가능해질 때마다 준비완료(ready) 상태에 있는 프로세스가 있어야 함
2. 우선순위(priority) 스케줄링
- 각 프로세스에게 우선순위를 부여하여 우선순위가 높은 순서대로 처리하는 방법
- 정적(static) 우선순위
- 실행이 쉽고 오버헤드 적음
- 주위 여건 변화에 적응 않고 우선순위 바뀌지 않음
- 동적(dynamic) 우선 순위
- 변화에 적응
- 각 프로세스에 부여된 처음의 우선순위는 필요에 따라 재구성되어 잠시 동안만 그 순위를 가질 뿐 다시 조정될 수 있음
- 오버헤드 많지만, 시스템의 응답도를 증가시켜 처리 효율을 높임
3. 기한부(deadline) 스케줄링
- 작업들이 명시된 시간이나 기한 내에 완료되도록 계획됨(실시간 시스템)
- 작업들의 결과가 시간 구간 내에 구해지면 매우 효용성이 높지만 제한 시간이 지난 후에 결과가 구해지면 쓸모가 없게 됨
- 적용이 어려운 이유
- 사용자는 사전에 작업이 요구하는 정확한 자원을 제시해야 하나, 그런 정보를 예측하기 어려움
- 시스템은 다른 사용자들에 대한 서비스를 감소시키지 않으면서 기한부 작업을 실행할 수 있어야 함
- 시스템은 기한까지 일을 끝내기 위하여 자신의 자원 안배를 주의 깊게 계획해야 하는데, 새로운 작업들이 계속 입력되고, 또 이러한 작업들이 시스템에 대하여 예기치 못한 요구를 하는 경우에 상당히 어려운 스케줄링이 요구됨
- 많은 기한부 작업들이 동시에 실행된다면 스케줄링이 너무 복잡해짐
- 기한부 스케줄링에 의해서 요구되는 집중적인 자원 운영은 많은 오버헤드를 초래
- 실시간 시스템의 종류
- 경성 실시간 시스템(hard real-time system)
- 중요한 태스크를 정한 시간 내에 완료할 수 있도록 해주는 강한 형태의 실시간 시스템
- 목적: 운영체제가 저장된 자료의 검색에서부터 시작하여 발생된 모든 요청을 완료할 때까지의 시스템 내의 모든 지연이 제한되도록 하는 데 있음
-> 이러한 엄격한 시간 제한은 경성 실시간 시스템에서의 스케줄링에 적용
-> 따라서 경성 실시간 시스템에서 사용되는 스케줄링은 라운드로빈 스케줄링의 동작과 상충되므로, 이 두 가지 스케줄링은 혼용될 수 없음- 연성 실시간 시스템(soft real-time system)
- 시간적 제한이 다소 약한 형태의 실시간 시스템
- 중요한 실시간 태스크가 다른 태스크보다 높은 우선순위를 얻고, 태스크가 완료될 때까지 이 우선순위를 계속 유지
- 커널은 경성 실시간 시스템에서처럼 반응이 올 때까지 지연이 제한될 필요가 있다. 실시간 태스크는 커널이 그것을 수행하도록 무기한 기다릴 수 없음
- Deadline 스케줄링을 지원하지 않기에, 산업용 제어나 로봇 공학에 사용되지 못함
-> 하지만 가상현실, 해저탐사 등과 같은 더욱 진보된 과학 프로젝트 등의 분야에 유용- 연성 실시간 시스템은 다른 형태의 시스템과 혼용할 수 있도록 하는 것이 목표이다.
- 실시간 스케줄링 방식
- 정적 스케줄링 방식
- 시스템에 의해 실행되는 태스크의 집합이 미리 정의되어 있는 경우를 의미
-> 주기적인 연성 실시간 태스크 집합에 유용- 동적인 스케줄링 방식
- 태스크의 발생 시간이나 특성을 미리 예측할 수 없을 경우에 유용하며, 태스크 발생이 가변적이어서 태스크 수는 실행 시에 정해짐
- 멀티미디어 시스템의 경우 긴급한 태스크가 보장된 주기의 시간 내에 서비스를 보장받기 위해서는 경성 실시간 스케줄링이 요구됨
- RM(Rate Monotonic) 알고리즘
- 대표적인 정적 스케줄링 방식
- 각 태스크 주기가 짧을수록 더 높은 우선순위를 부여
- 태스크를 실행하는 프로세스들은 자신의 우선순위를 갖고 있으며 이 우선순위를 기준으로 높은 태스크가 먼저 스케줄링 됨
- EDF(Earliest –Deadline First) 알고리즘
- 대표적인 동적 스케줄링 방식
- 임계 시간이 가장 근접한 태스크를 가장 먼저 수행하는 방식
4. 다중 프로세서(Multiple Processor) 스케줄링
- 여러 개의 중앙처리장치가 사용 가능하게 되면, 스케줄링 문제는 더욱 복잡해짐
- 프로세서들의 형태
- 이질 시스템
- 각 프로세서는 자신의 큐가 있으며 자신의 스케줄링 알고리즘을 갖음
- 각 프로세서는 고유한 구조 형태를 가짐
- 해당 프로세서의 명령어로 작성된 프로그램은 그 프로세서에서만 실행
- 동질 시스템
- 부하 공유(load sharing)를 하게 됨
- 각 프로세서마다 별개의 큐를 제공하는 것이 가능하나 큐가 비어 있는 프로세서는 쉬게 되며, 다른 프로세서들은 매우 바쁘게 되므로 공동의 큐를 사용
- 프로세스들은 한 개의 공동 큐로 들어가서 실행 가능한 프로세서에서 스케줄 됨
- 스케줄링 방식
- 각 프로세서가 스스로 스케줄링하며, 공동 준비 큐를 조사하여 실행할 프로세서를 선택
- 한 프로세서가 다른 프로세서를 위한 스케줄러로서 지정되어 주-종 구조(master –slave structure)를 구성
