소스코드
https://github.com/BLUEVERY8/OOM_Self-driving-car.git
ROS 배포판: ROS2 foxy
시뮬레이션 환경: gazebo 11
개발 환경: ubuntu 22.04
프로젝트 개요 | 문제 정의
프로젝트 개요 | 시험장 환경
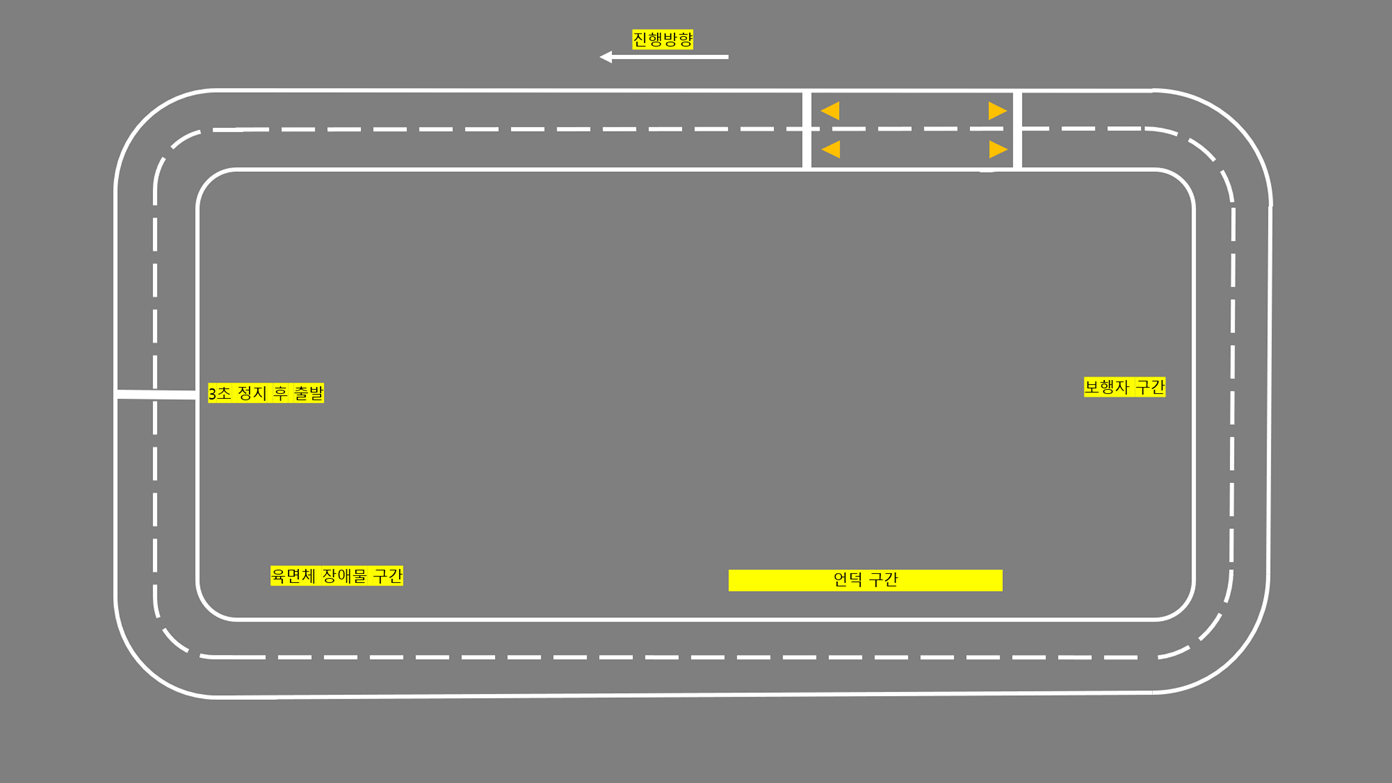
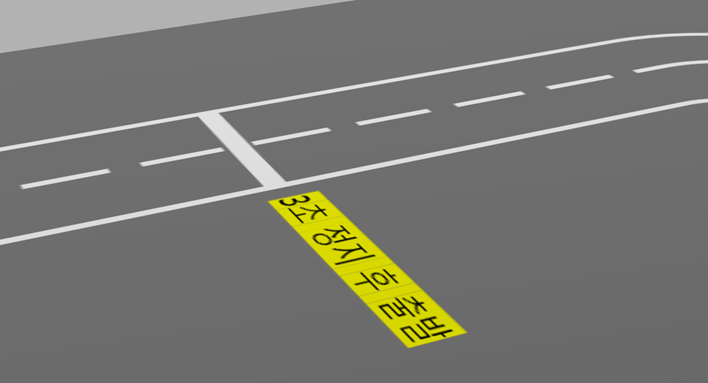
정지선
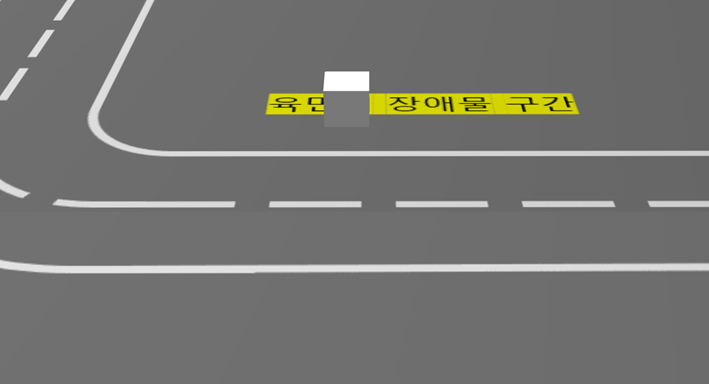
장애물
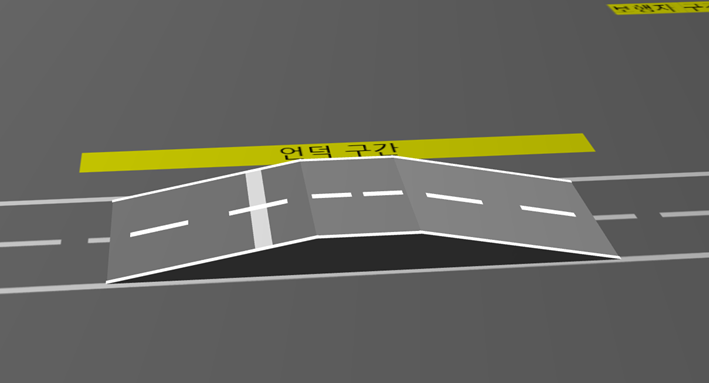
언덕 정지선
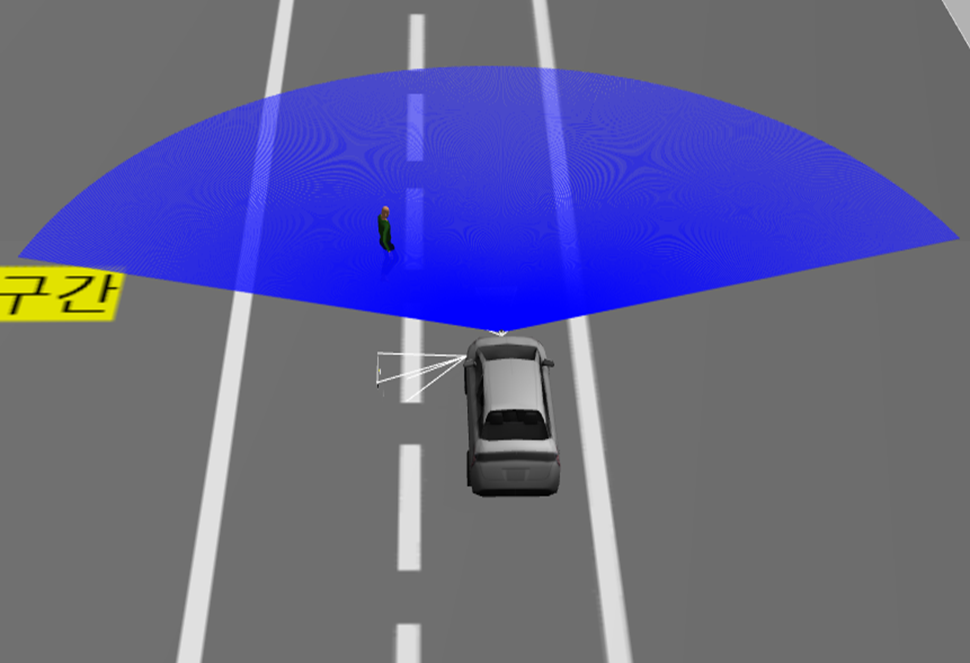
보행자


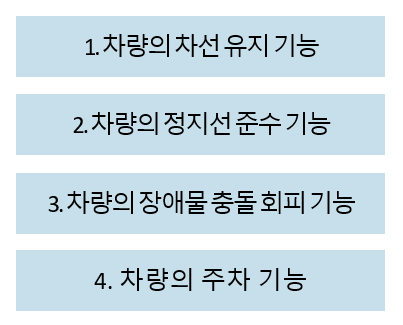
프로젝트 목표 | 기능 요구사항

<car_sim.launch.py>
# 차량 지정
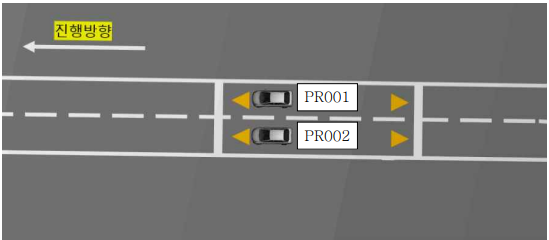
car = 'PR001'launch 파일에서 변수를 통해 차량을 지정한다.
# 지정된 차량 정보를 전달하는 노드
starter = Node(
package='ros2_term_project',
executable='starter',
name='starter',
arguments=[car],
output='screen'
)<starter 노드>
# 지정된 차량 정보가 올바른지 확인
if self.test_car == 'PR001' or self.test_car == 'PR002':
msg.car = self.test_car
self.car_info_publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg.car)
else:
self.get_logger().error('"%s": 해당 차량이 존재하지 않습니다.' %self.test_car)starter 노드가 받은 차량 정보를 토픽을 통해 controller 노드에 전달
def car_info_listener_callback(self, msg: Target):
# 지정 차량
car = msg.car
self.get_logger().info('I heard: "%s"' % msg.car)
time.sleep(5)
# 차량에 속도 정보를 전달할 publisher
self.twist_publisher_ = self.create_publisher(Twist, '/demo/' + car + '_cmd_demo', 10)
# 차량 출발
twist = Twist()
for i in range(200):
twist.linear.x = 6.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
# 카메라, 라이다 정보를 처리하는 노드들에 차량 정보 전달
car_info_msg = String()
car_info_msg.data = car
self.car_info_publisher.publish(car_info_msg)지정된 차량에 맞게 차량 제어할 publisher 생성

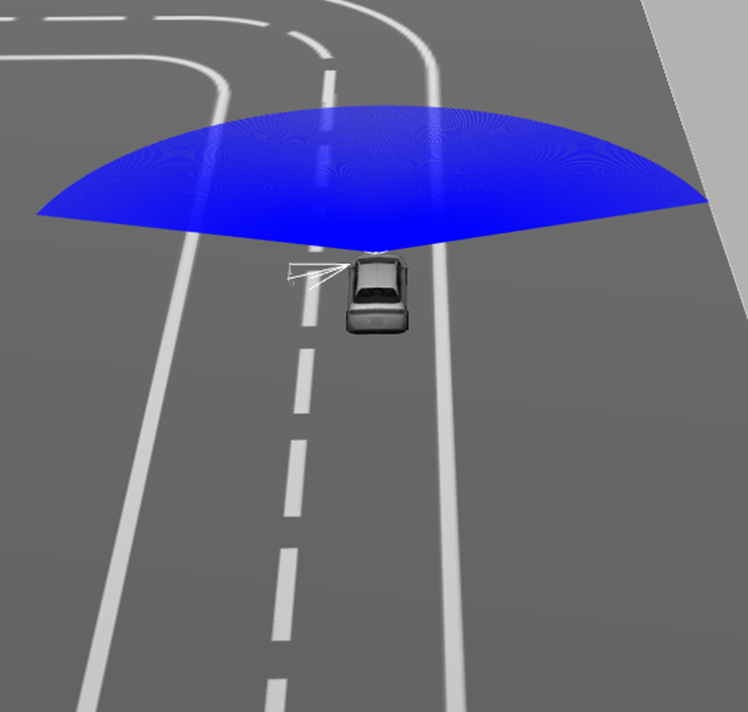
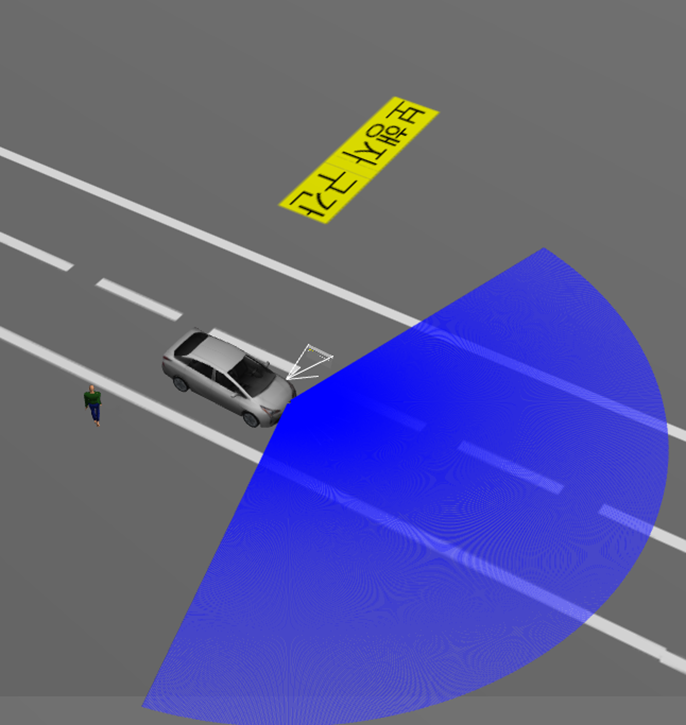
사이드 카메라를 통해 차선을 인식
<line_tracker.py>
def process(self, img: numpy.ndarray) -> None:
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_white = numpy.array([0, 0, 200])
upper_white = numpy.array([180, 255, 255])
# 흰색 식별
mask = cv2.inRange(hsv, lower_white, upper_white)
h, w, d = img.shape
search_top = int(h / 2)
# 마스킹
mask[0:search_top, 0:w] = 0
# 차선 검출
M = cv2.moments(mask)
if M['m00'] > 0:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
cv2.circle(img, (cx, cy), 20, (0, 0, 255), -1)
# BEGIN CONTROL
err = cy - 3*h/4
self._delta = err
# END CONTROL흰색 차선을 식별하고 차선의 위치를 통해 차량의 위치를 파악한다.
<line_follower 노드>
def lane_image_callback(self, image: Image):
# ros image를 opencv image로 변환
img = self.bridge.imgmsg_to_cv2(image, desired_encoding='bgr8')
# 이미지를 기반으로 차선 검출
self.line_tracker.process(img)
# 회전 속도 조절
twist = Twist()
msg = String()
twist.angular.z = (-1) * self.line_tracker._delta / 110
# 방향 조정 최대치 설정
if twist.angular.z > 0.7:
twist.angular.z = 0.7
# 회전 인식
if twist.angular.z > 0.08:
msg.data = '회전'
else:
msg.data = '직진'
# 회전 시 감속
if twist.angular.z > 0.3:
twist.linear.x = 3.0
else:
twist.linear.x = 6.0
self.drive_issue_publisher_.publish(msg)
self.twist_info_publisher_.publish(twist)파악된 차량의 위치를 바탕으로 차량의 속도와 진행 방향을 조정한다.

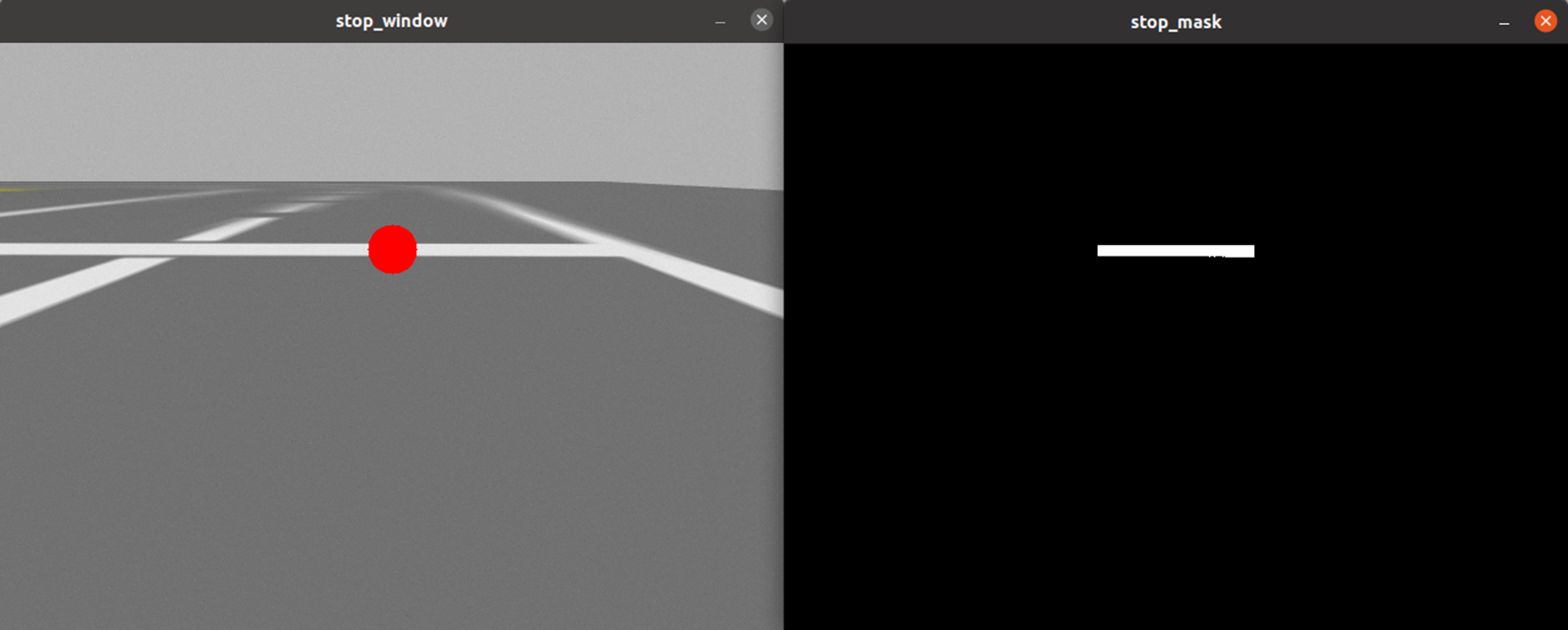
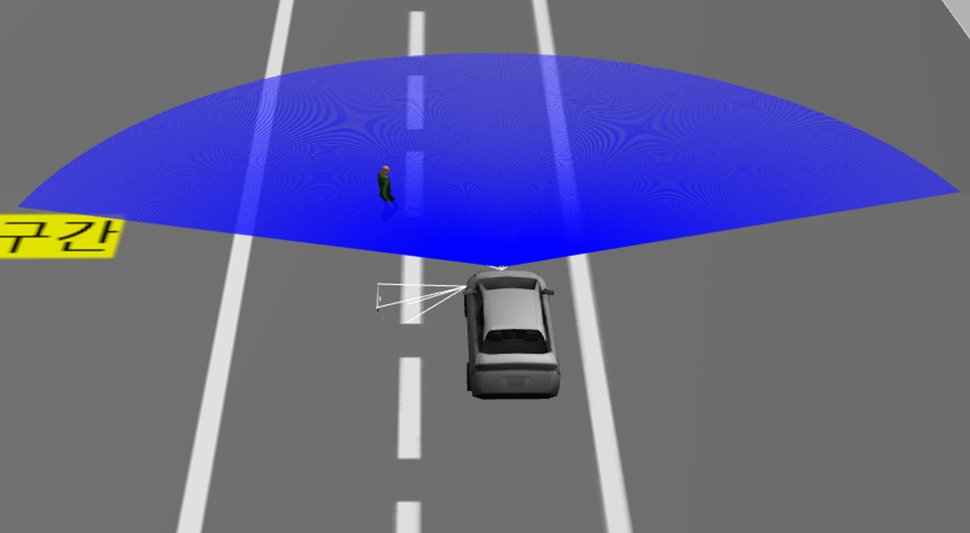
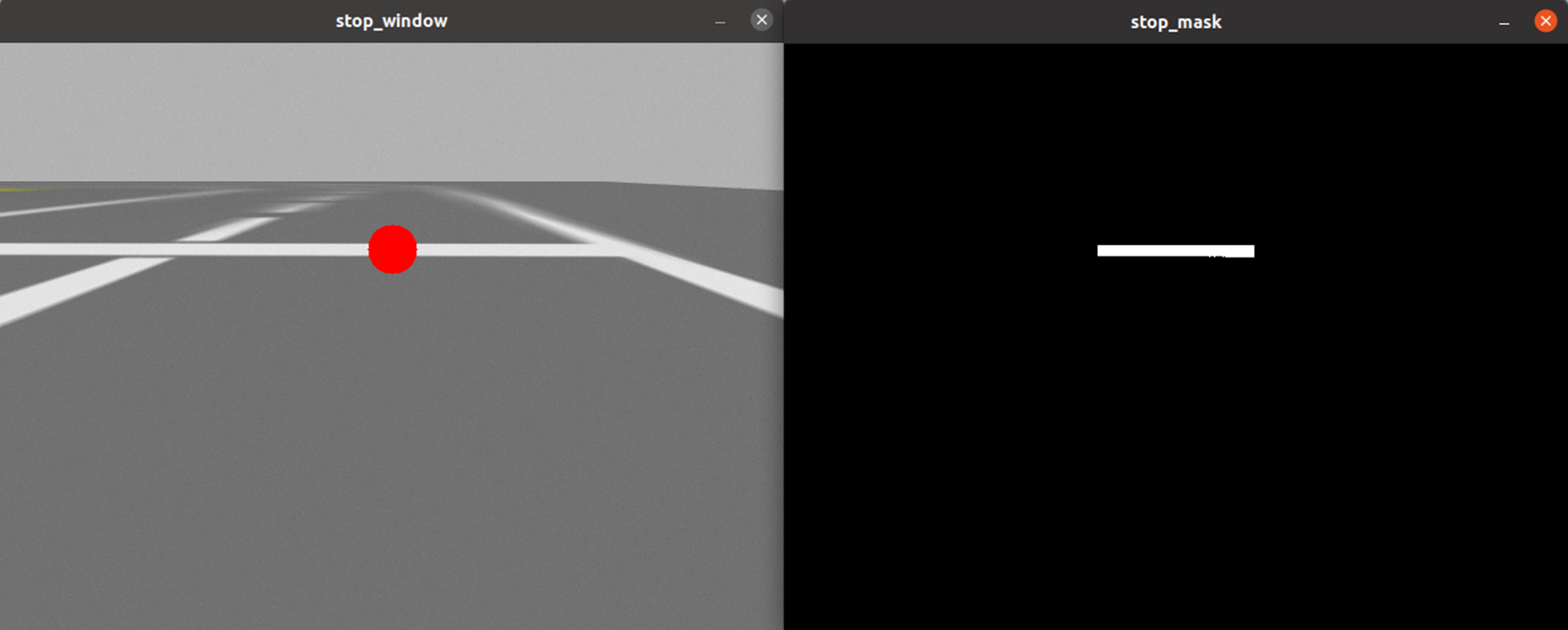
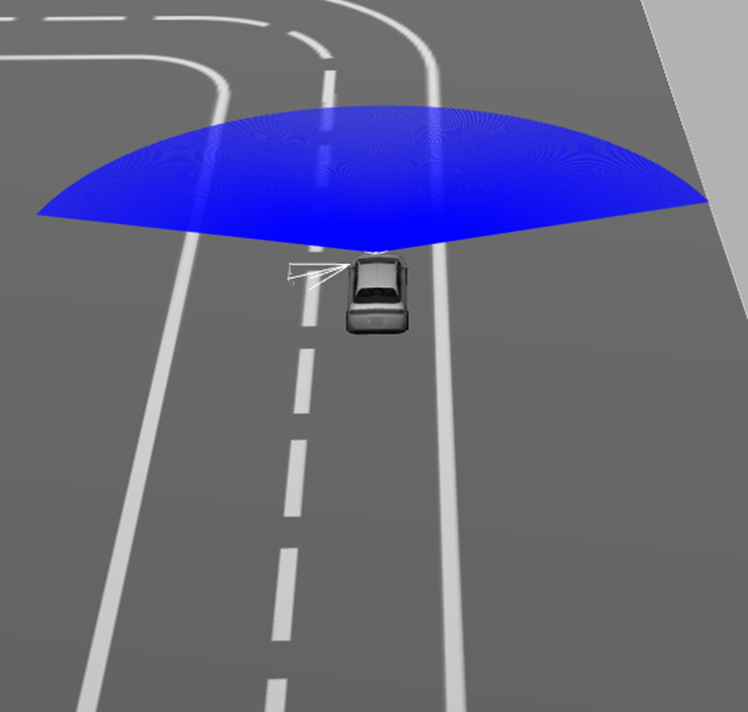
전방 카메라를 통해 정지선 인식
<line_tracker.py>
def process(self, img: numpy.ndarray) -> None:
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_white = numpy.array([0, 0, 200])
upper_white = numpy.array([180, 255, 255])
self._delta = None
# 흰색 식별
mask = cv2.inRange(hsv, lower_white, upper_white)
h, w, d = img.shape
search_top = int(13*h / 40)
search_bot = int(25*h/40)
# 마스킹
mask[0:search_top, 0:w] = 0
mask[search_bot:h, 0:w] = 0
mask[0:h, 0:int(2 * w / 5)] = 0
mask[0:h, int(3 * w / 5):w] = 0
# 정지선 검출
M = cv2.moments(mask)
if M['m00'] > 0:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
cv2.circle(img, (cx, cy), 20, (0, 0, 255), -1)
# BEGIN CONTROL
err = abs(cx - w / 2)
self._delta = err
# END CONTROL검출된 흰색 선의 중심이 카메라의 중심에 있는지로 정지선 인식
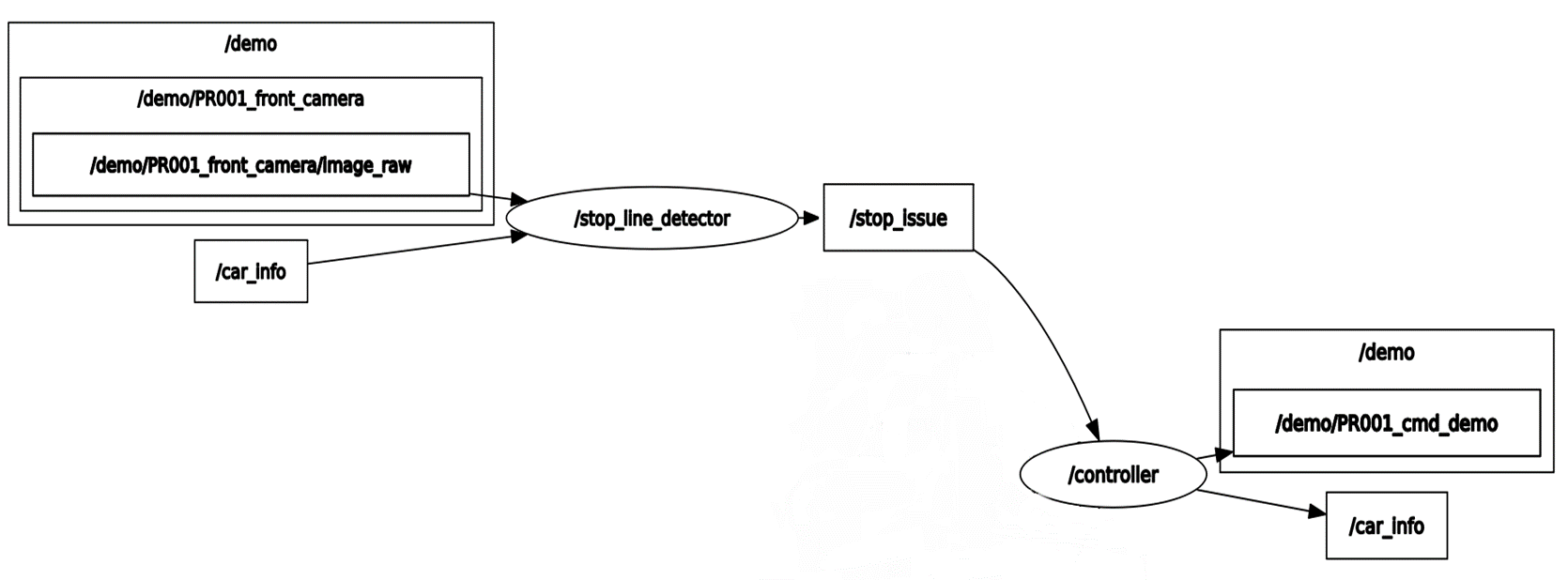
<stop_line_detector 노드>
def stop_line_image_callback(self, image: Image):
# ros image를 opencv image로 변환
img = self.bridge.imgmsg_to_cv2(image, desired_encoding='bgr8')
# 이미지를 기반으로 정지선 검출
self.stop_line_tracker.process(img)
# 정지선 확인
if self.stop_line_tracker._delta is not None and self.stop_line_tracker._delta < 3.0:
msg = String()
msg.data = '정지'
self.stop_issue_publisher_.publish(msg)
else:
msg = String()
msg.data = ''
self.stop_issue_publisher_.publish(msg)정지선 인식 결과를 바탕으로 controller 노드에게 메시지 전달
<controller 노드>
def stop_issue_listener_callback(self, msg: String):
# 언덕 정지선
if msg.data == '정지' and not self.turn and not self.stop and self.count == 1:
self.stop = True
self.count += 1
twist = Twist()
twist.angular.y = 0.0
# 차량이 밀리지 않도록
for i in range(3500):
twist.linear.x = 1.3
self.twist_publisher_.publish(twist)
time.sleep(0.001)
self.stop = False
# 차량 출발
for i in range(2000):
twist.linear.x = 6.0
self.twist_publisher_.publish(twist)
time.sleep(0.001)
# 평지 정지선
if msg.data == '정지' and not self.turn and not self.stop and self.count == 0:
self.stop = True
self.count += 1
twist = Twist()
# 3초간 정지
for i in range(400):
twist.linear.x = 0.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
# 차량 출발
for i in range(200):
twist.linear.x = 6.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
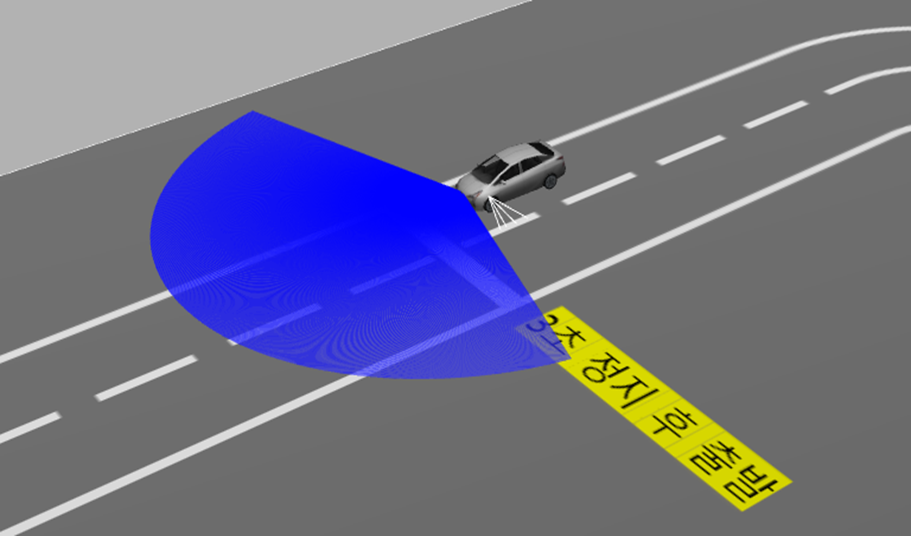
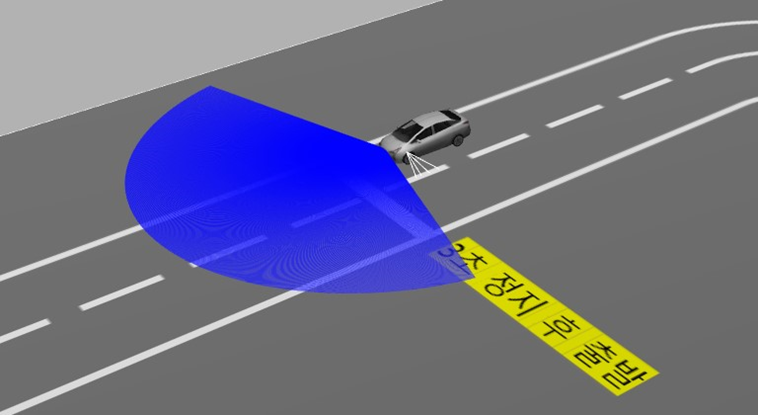
self.stop = False테스트 트랙 한정으로 정지선 순서로 언덕구간 구분
언덕 구간에서는 차량이 뒤로 밀리지 않도록 계속하여 선속도를 1m/s로 전달
정지선 앞에서는 3초간 정지 후 출발

def scan_callback(self, scan: LaserScan):
msg = String()
min_distance = min(scan.ranges)
if min_distance < 12:
self.get_logger().info('min_distance: %f' % min_distance)
# 주행 범위에 장애물이 감지되면
if min_distance <= 8.5:
msg.data = '장애물 감지'
self.obstacle_issue_publisher_.publish(msg)
self.wait = True
time.sleep(1)
return
if not self.wait:
msg.data = ''
self.obstacle_issue_publisher_.publish(msg)
self.wait = False
# 장애물이 지나갔을 시
if self.wait and min_distance > 7.5:
for i in range(20):
msg.data = '이동 가능'
self.obstacle_issue_publisher_.publish(msg)
time.sleep(0.1)
self.wait = False
msg.data = ''
self.obstacle_issue_publisher_.publish(msg)
self.destroy_node()
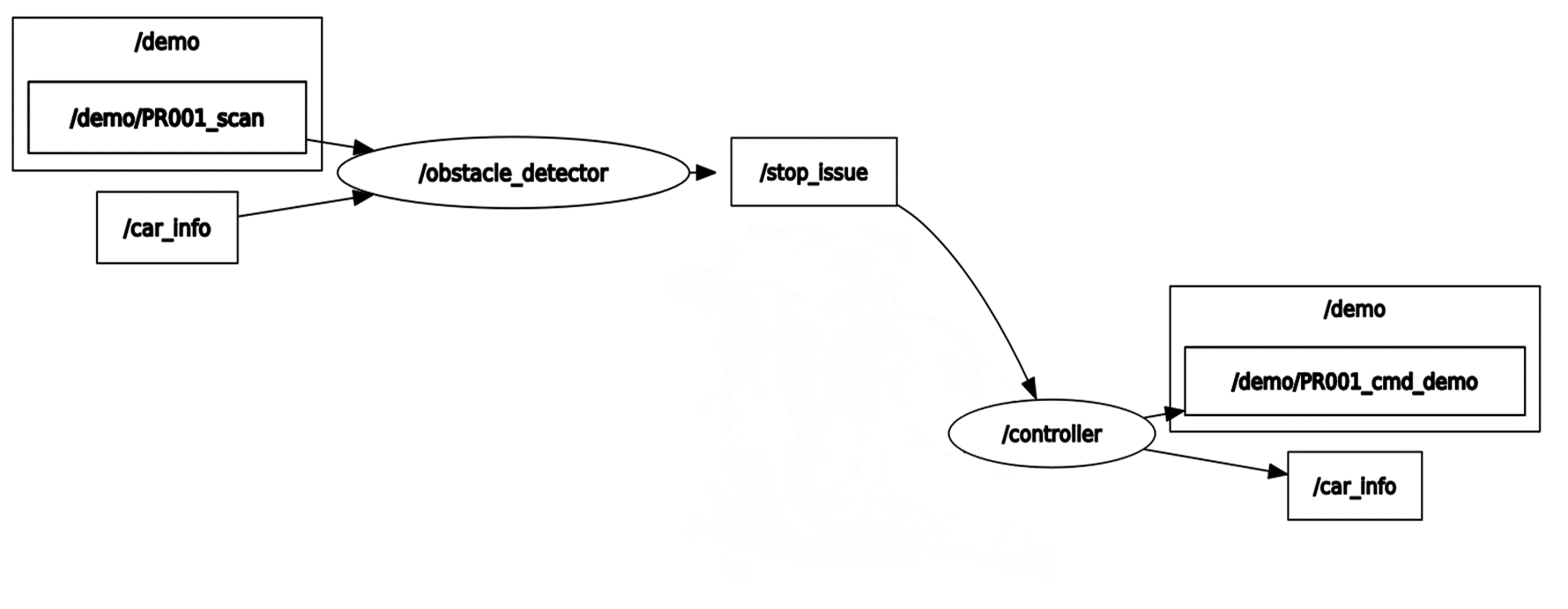
return라이다를 통해 8.5m 이내에 물체가 감지되면 차량을 제어하는 controller 노드에 정지 메시지를 보내도록 했습니다.
정지 후 물체가 7.5m 밖으로 이동하게 되면 다시 이동할 수 있도록 하였습니다.
<controller 노드>
def obstacle_issue_listener_callback(self, msg: String):
# 장애물이 범위를 빠져나갔을 때
if msg.data == '이동 가능' and self.obstacle_found:
self.obstacle_found = False
twist = Twist()
for i in range(200):
twist.linear.x = 6.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
return
if msg.data == '장애물 감지' and not self.obstacle_found:
self.obstacle_found = True
twist = Twist()
for i in range(10):
twist.linear.x = 0.0
twist.angular.y = 0.0
self.twist_publisher_.publish(twist)
time.sleep(0.1)controller 노드는 전달받은 메시지에 따라 차량을 제어한다.

<actor_detect.py>
def process(self, img: np.ndarray) -> None:
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 보행자의 파란 바지
lower_blue = np.array([110, 30, 30])
upper_blue = np.array([130, 255, 255])
self._delta = None
# actor 식별
mask = cv2.inRange(hsv, lower_blue, upper_blue)
h, w, d = img.shape
search_top = int(35*h / 120)
# 마스킹
mask[0:search_top, 0:w] = 0
mask[0:h, 0:int(w / 15)] = 0
mask[0:h, int(14 * w / 15):w] = 0
# 보행자 위치 식별
M = cv2.moments(mask)
if M['m00'] > 0:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
cv2.circle(img, (cx, cy), 20, (0, 0, 0), -1)
# BEGIN CONTROL
err = abs(cx - w / 2)
self._delta = err
# END CONTROL전방 카메라로 보행자의 파란 바지를 인식하여 보행자의 위치를 판단
<actor_detect_processor 노드>
def actor_image_callback(self, image: Image):
msg = String()
# ros image를 opencv image로 변환
img = self.bridge.imgmsg_to_cv2(image, desired_encoding='bgr8')
# 이미지를 기반으로 보행자 감지
self.actor_detector.process(img)
# 보행자 감지
if self.actor_detector._delta is not None and self.actor_detector._delta <= 230:
msg.data = '보행자 감지'
self.actor_issue_publisher_.publish(msg)
self.wait = True
if not self.wait:
msg = String()
msg.data = ''
self.actor_issue_publisher_.publish(msg)
self.wait = False
# 보행자가 지나갔을 때
if self.wait and self.actor_detector._delta is not None and self.actor_detector._delta > 230:
for i in range(20):
msg.data = '이동 가능'
self.actor_issue_publisher_.publish(msg)
time.sleep(0.1)
self.wait = False
if self.wait and self.actor_detector._delta is None:
for i in range(20):
msg.data = '이동 가능'
self.actor_issue_publisher_.publish(msg)
time.sleep(0.1)
self.wait = False보행자의 위치에 따라 정지 또는 주행에 대한 메시지를 차량을 제어하는 controller 노드에 전달
<controller 노드>
def actor_issue_listener_callback(self, msg: String):
#보행자가 지나갔을 시
if self.obstacle_found and msg.data == '이동 가능':
self.obstacle_found = False
self.get_logger().info('보행자 통과')
twist = Twist()
for i in range(200):
twist.linear.x = 6.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
if msg.data == '보행자 감지' and not self.turn:
self.obstacle_found = True
twist = Twist()
for i in range(10):
twist.linear.x = 0.0
self.twist_publisher_.publish(twist)
time.sleep(0.1)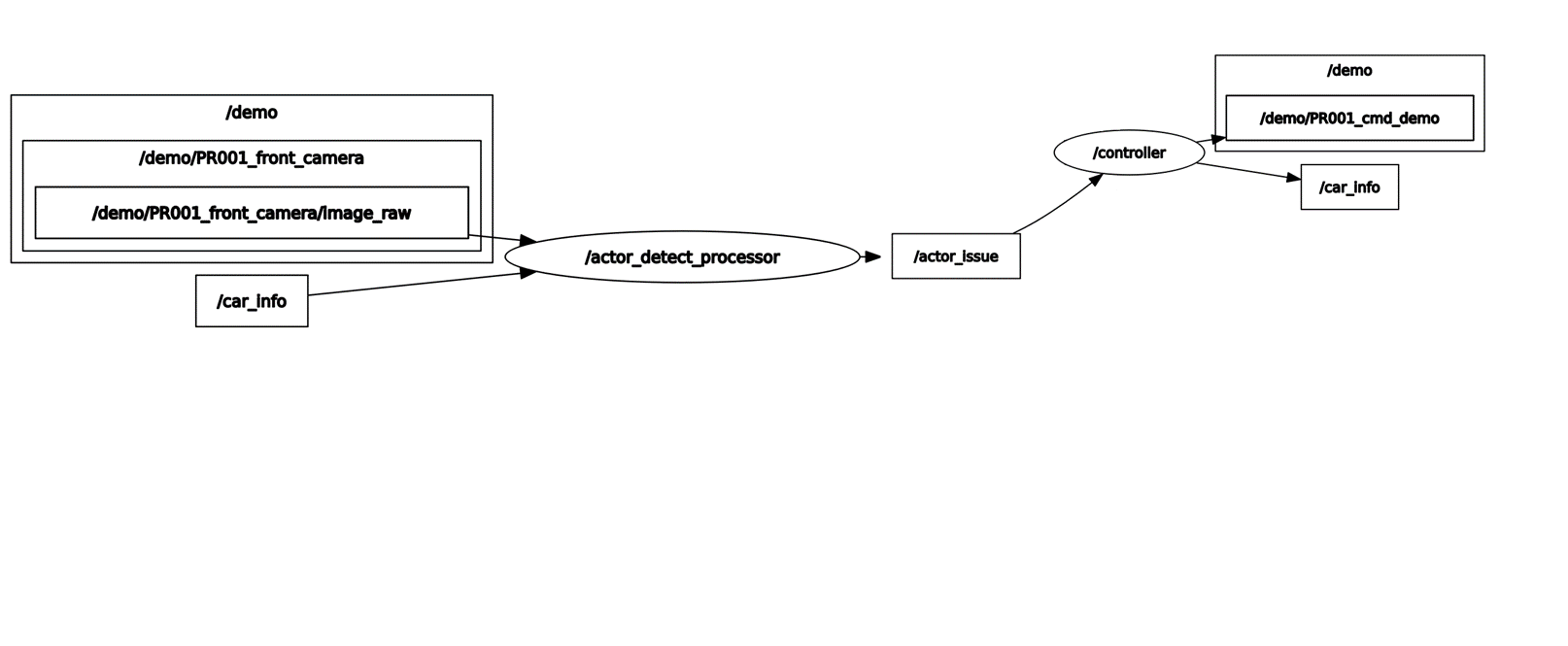

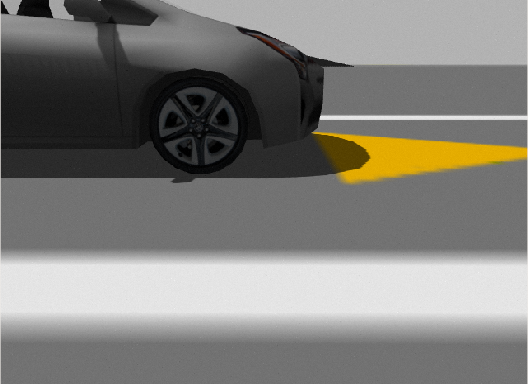
<end_line_tracker.py>
def process(self, img: numpy.ndarray) -> None:
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 노란색 종료 지점 마크
lower_yellow = numpy.array([20, 200, 200])
upper_yellow = numpy.array([30, 255, 250])
# 노란색 식별
mask = cv2.inRange(hsv, lower_yellow, upper_yellow)
h, w, d = img.shape
search_bot = int(4*h / 7)
# 마스킹
mask[search_bot:h, 0:w] = 0
mask[0:h, 0:int(w / 4)] = 0
mask[0:h, int(2 * w / 3):w] = 0
# 종료선 검출
M = cv2.moments(mask)
if M['m00'] > 0:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
cv2.circle(img, (cx, cy), 20, (255, 0, 0), -1)
# BEGIN CONTROL
err = abs(cx - w/2)
self._delta = err
# END CONTROL전방 카메라를 통해 종료 지점에 있는 노란색 마크를 인식
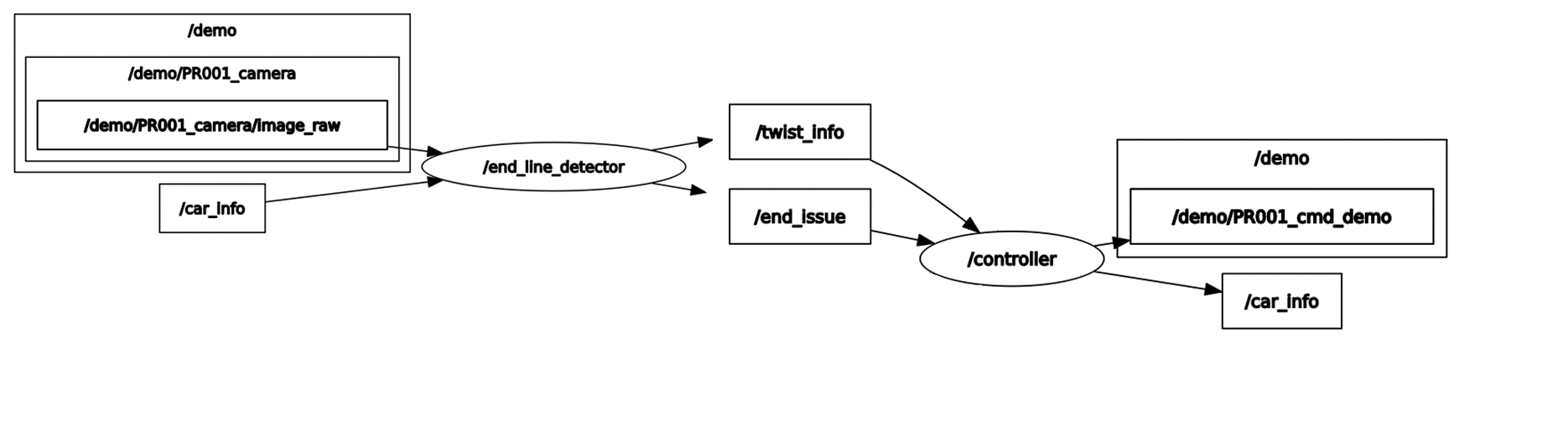
<end_line_detector 노드>
def end_line_image_callback(self, image: Image):
# ros image를 opencv image로 변환
img = self.bridge.imgmsg_to_cv2(image, desired_encoding='bgr8')
# 이미지를 기반으로 종료선 검출
self.end_line_tracker.process(img)
#종료선 확인
if self.end_line_tracker._delta is not None and self.end_line_tracker._delta < 30:
msg = String()
msg.data = '종료'
self.end_issue_publisher_.publish(msg)일정 거리에 종료 마크가 인식되면 차량을 제어하는 controller 노드에 종료 메시지를 전달
<controller 노드>
def end_issue_listener_callback(self, msg: String):
if msg.data == '종료' and not self.turn:
self.stop = True
twist = Twist()
# 정지선 1m 이내 정차
for i in range(200):
twist.linear.x = 2.0
self.twist_publisher_.publish(twist)
time.sleep(0.01)
twist.linear.x = 0.0
twist.angular.z = 0.0
self.twist_publisher_.publish(twist)
self.get_logger().info('종료')
# 테스트 종료
self.destroy_node()
return정지선 1m 이내에 정차하고 controller 노드를 정지하며 테스트 종료

<test_track.world>
<plugin name='PR001_ackermann_drive' filename='libgazebo_ros_ackermann_drive.so’>
<max_speed>6</max_speed>
차량은 ackermann drive 방식을 사용하는 prius hybrid 모델을 사용하였으며 플러그인을 통해 최대 속도를 6m/s로 제한하였다.

<sensor name='PR002_camera' type='camera'>
<always_on>1</always_on>
<visualize>1</visualize>
<update_rate>30</update_rate>
<camera name='picam'>
<horizontal_fov>1.0856</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.03</near>
<far>100</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name='PR002_camera_driver' filename='libgazebo_ros_camera.so'>
<ros>
<namespace>demo</namespace>
<remapping>image_raw:=PR002_image_raw</remapping>
<remapping>camera_info:=PR002_camera_info</remapping>
</ros>
<cameraName>PR002_camera</cameraName>
<frameName>camera_rgb_optical_frame</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>카메라는 전방 카메라와 측면 카메라 2대로 구성했으며, 전방 카메라는 장애물 인식, 정지선 인식, 종료 지점 인식을 위해 사용되며, 측면 카메라는 차선 유지를 위해 사용되어진다.

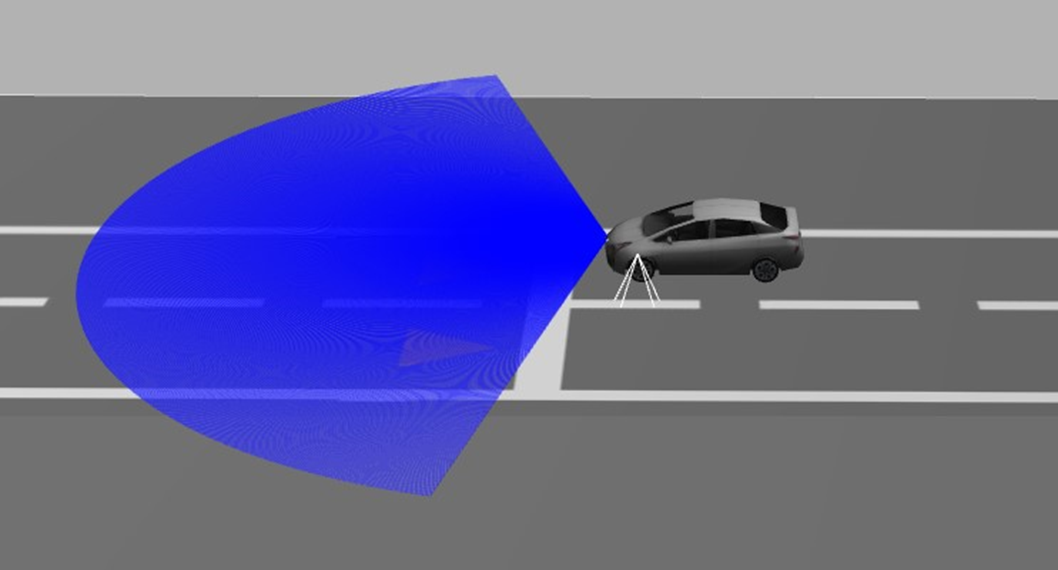
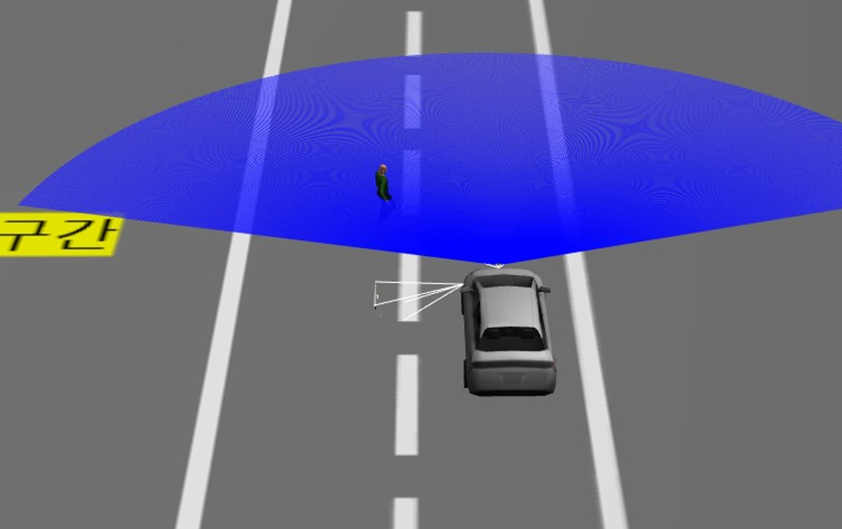
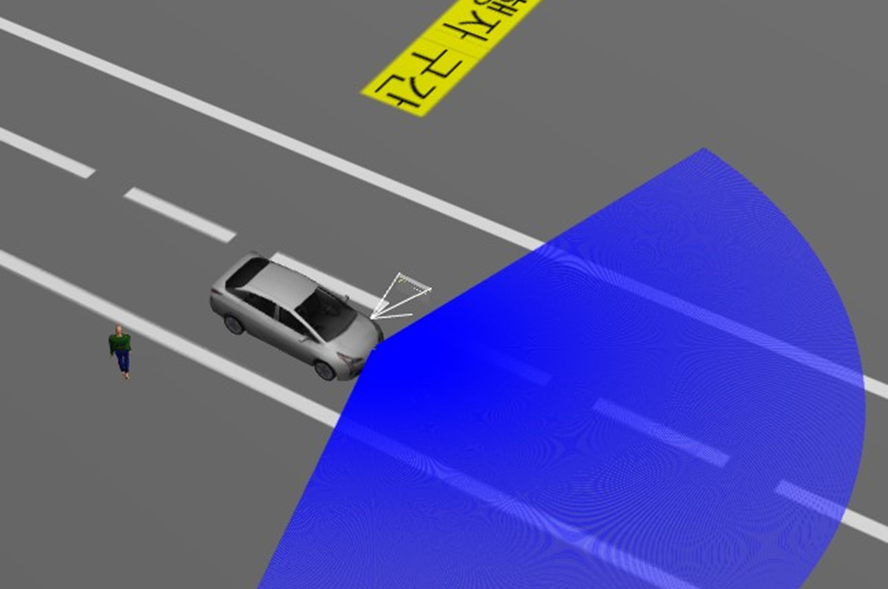
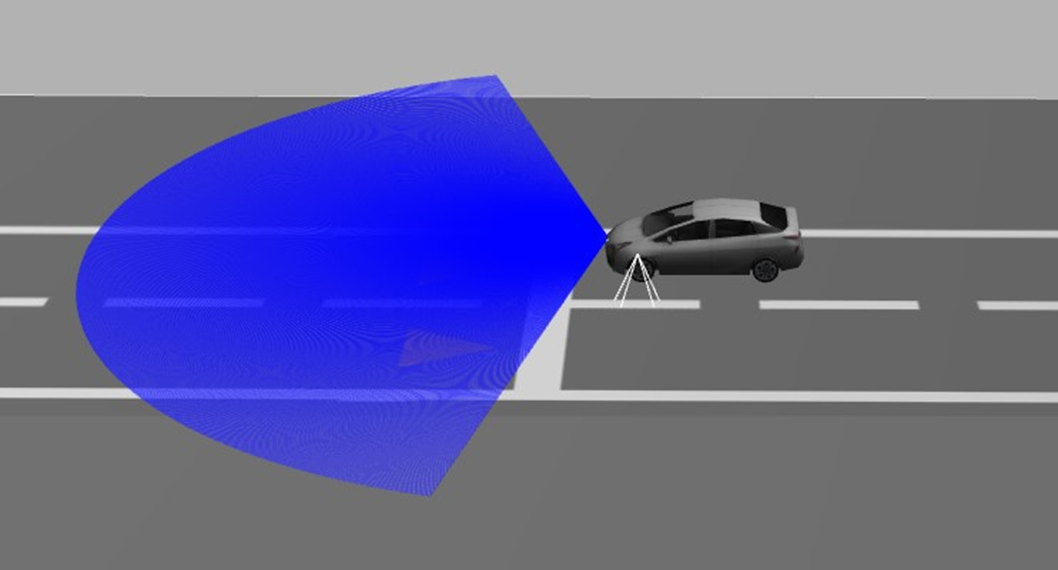
<sensor name='laser' type='ray'>
<ray>
<scan>
<horizontal>
<samples>160</samples>
<resolution>5</resolution>
<min_angle>-1.3</min_angle>
<max_angle>1.3</max_angle>
</horizontal>
<vertical>
<samples>1</samples>
<min_angle>0</min_angle>
<max_angle>0</max_angle>
</vertical>
</scan>
<range>
<min>0.08</min>
<max>12</max>
<resolution>0.2</resolution>
</range>
</ray>
<plugin name='PR002_laser' filename='libgazebo_ros_ray_sensor.so'>
<ros>
<namespace>demo</namespace>
<remapping>~/out:=PR002_scan</remapping>
</ros>
<frame_name>hokuyo_link</frame_name>
<output_type>sensor_msgs/LaserScan</output_type>
</plugin>
<always_on>1</always_on>
<update_rate>5</update_rate>
<visualize>1</visualize>
</sensor>라이다의 인식 좌우 범위는 -1.3에서 1.3으로 설정했으며 최소 0.08m 최대 12m까지 인식할 수 있게 했다.
가제보의 actor를 사용할 경우 즉, 이 프로젝트에서 보행자를 라이다로 인식하려는 경우 라이다의 타입을 gpu_ray로 사용하면 된다.

<test_track.world>
<model name="moving_box">
<pose>40 -70.0 0.05 0 0 0</pose>
<link name="link">
<collision name= "collision">
<geometry>
<box>
<size>2 2 2</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>2 2 2</size>
</box>
</geometry>
</visual>
</link>
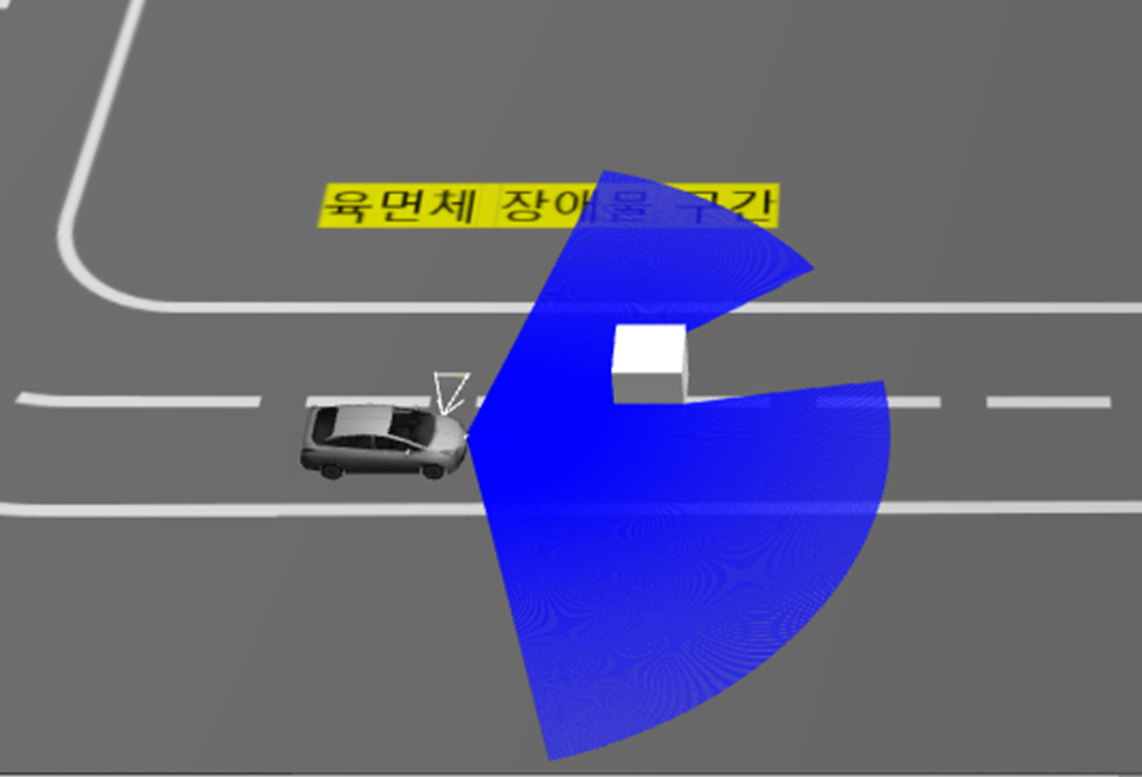
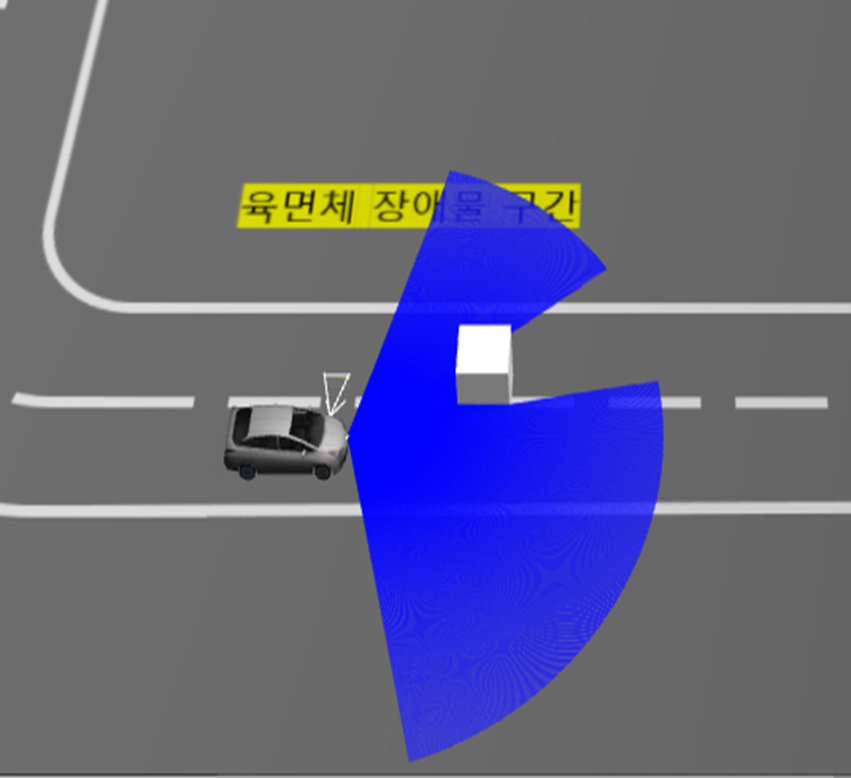
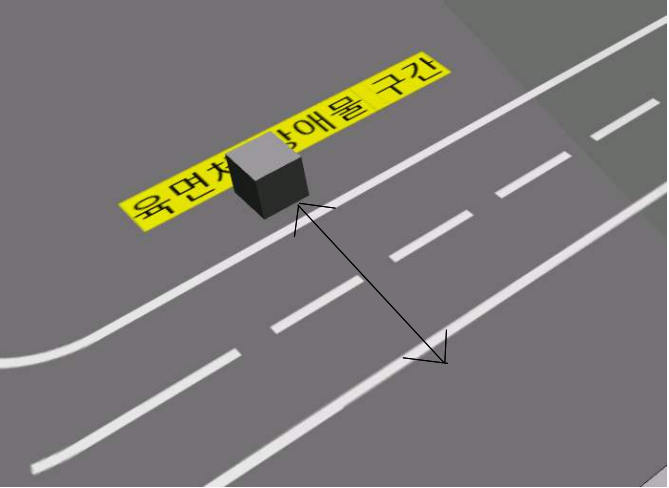
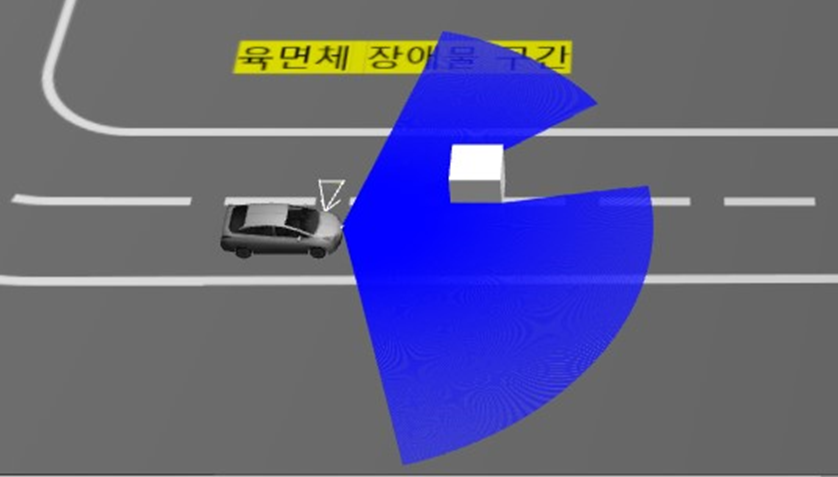
가로, 세로, 높이 각 2m로 육면체 장애물 모델을 구성하였다.
<plugin name='planar_move' filename='libgazebo_ros_planar_move.so'>
<ros>
<namespace>demo</namespace>
<remapping>cmd_vel:=box_cmd_demo</remapping>
<remapping>odom:=box_odom_demo</remapping>
</ros>
</plugin>planar_move 플러그인을 통해 육면체가 이동할 수 있게 하였고
<box_controller 노드>
class BoxController(Node):
def __init__(self):
super().__init__('box_controller')
# 박스에 속도 정보를 전달할 publisher
self.publisher_ = self.create_publisher(Twist, '/demo/box_cmd_demo', 10)
# 박스의 위치 정보를 받을 subscription
self.subscription_ = self.create_subscription(Odometry, '/demo/box_odom_demo', self.listener_callback, 10)
timer_period = 0.1 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.direction = 1
self.msg = Twist()
# 박스 위치
self.y = None
def listener_callback(self, odom: Odometry):
self.y = odom.pose.pose.position.y
# 박스가 차선을 왕복할 수 있도록
if self.direction == 1 and self.y > -62:
self.direction *= -1
if self.direction == -1 and self.y < -79:
self.direction *= -1
def timer_callback(self):
self.msg.linear.y = 2.0 * self.direction
self.publisher_.publish(self.msg)
육면체가 2m/s의 속도 움직이게 하며 육면체의 odometry 정보를 받아와 차선을 왕복하는 것을 반복하게 하였다.

<test_track.world>
<actor name="actor_walking">
<skin>
<filename>walk.dae</filename>
</skin>
<animation name="walk">
<filename>walk.dae</filename>
<interpolate_x>true</interpolate_x>
</animation>
<script>
<trajectory id="0" type="walk" tension="0.6">
<waypoint>
<time>0</time>
<pose>127 -41 0 0 0 0</pose>
</waypoint>
<waypoint>
<time>10</time>
<pose>138 -41 0 0 0 0</pose>
</waypoint>
<waypoint>
<time>11</time>
<pose>138 -41 0 0 0 -3.0</pose>
</waypoint>
<waypoint>
<time>21</time>
<pose>127 -41 0 0 0 -3.0</pose>
</waypoint>
<waypoint>
<time>22</time>
<pose>127 -41 0 0 0 0</pose>
</waypoint>
</trajectory>
</script>
보행자는 가제보의 actor를 활용해 구성했으며 1.1m/s의 속도로 차선을 왕복하는 것을 반복하도록 하였다.

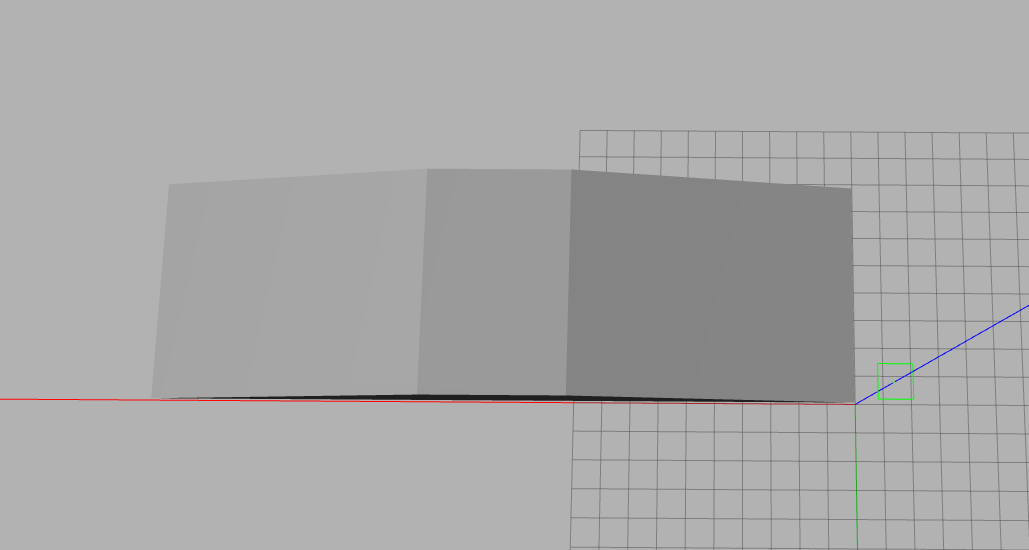
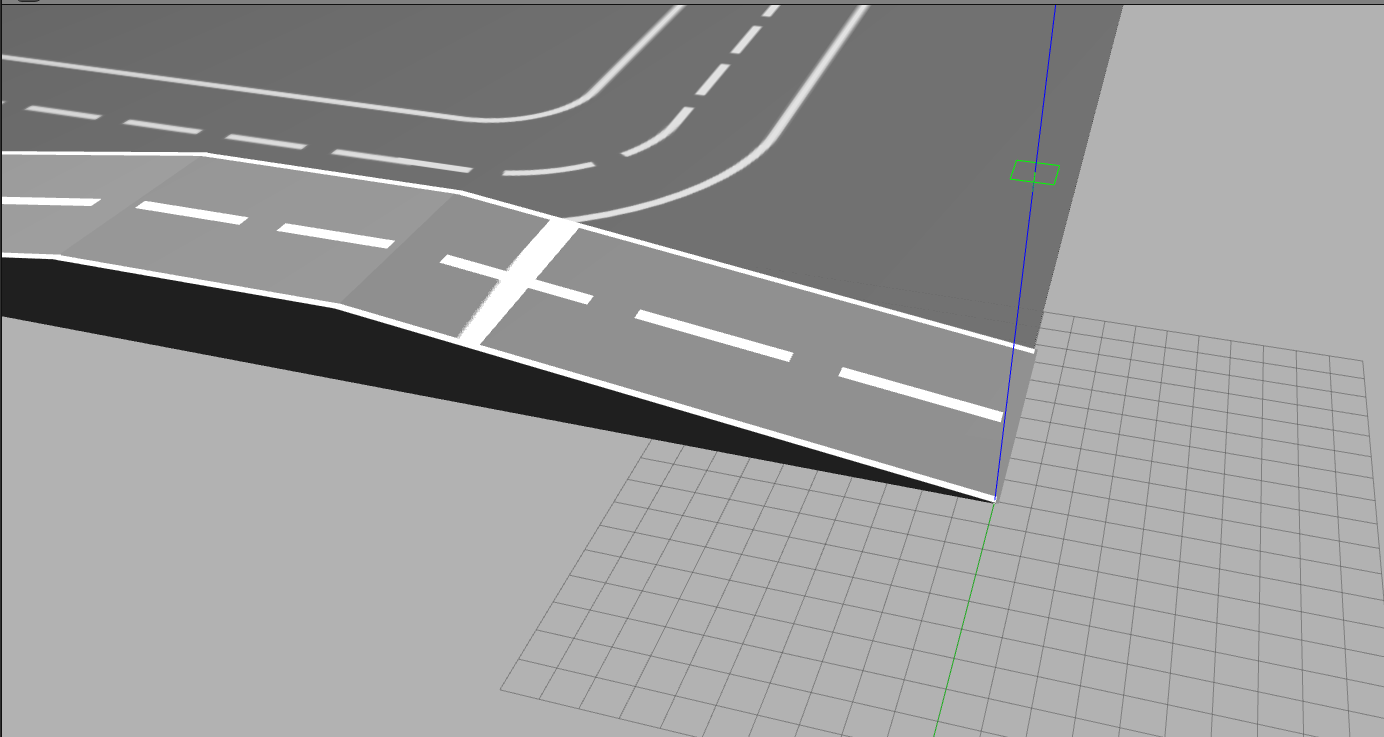
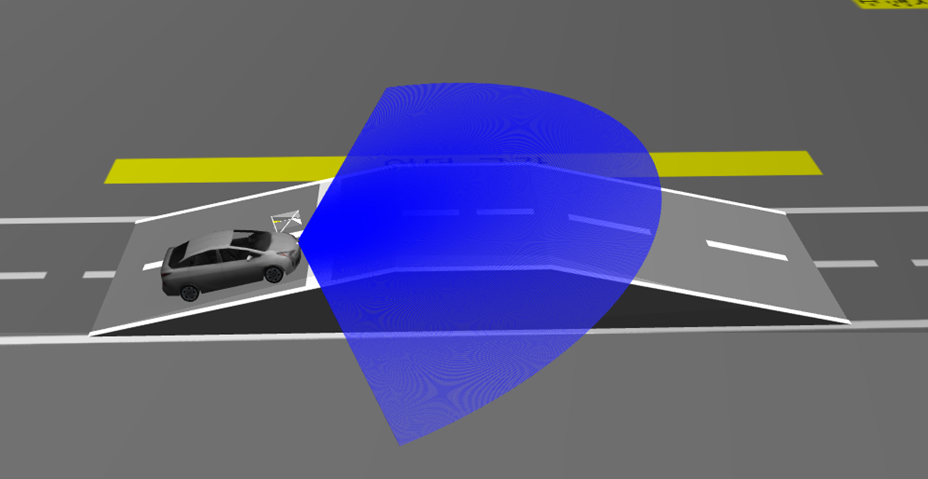
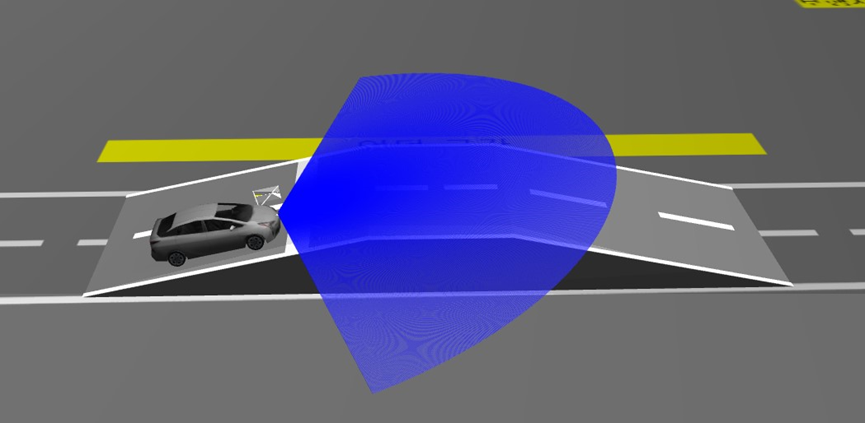
언덕 구간은 3D 모델링을 통해 STL 파일로 만든 뒤 차선과 정지선을 적용해서 가제보 시뮬레이션 환경 상에 추가하였습니다.

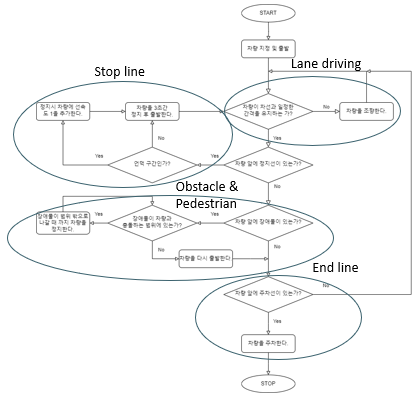
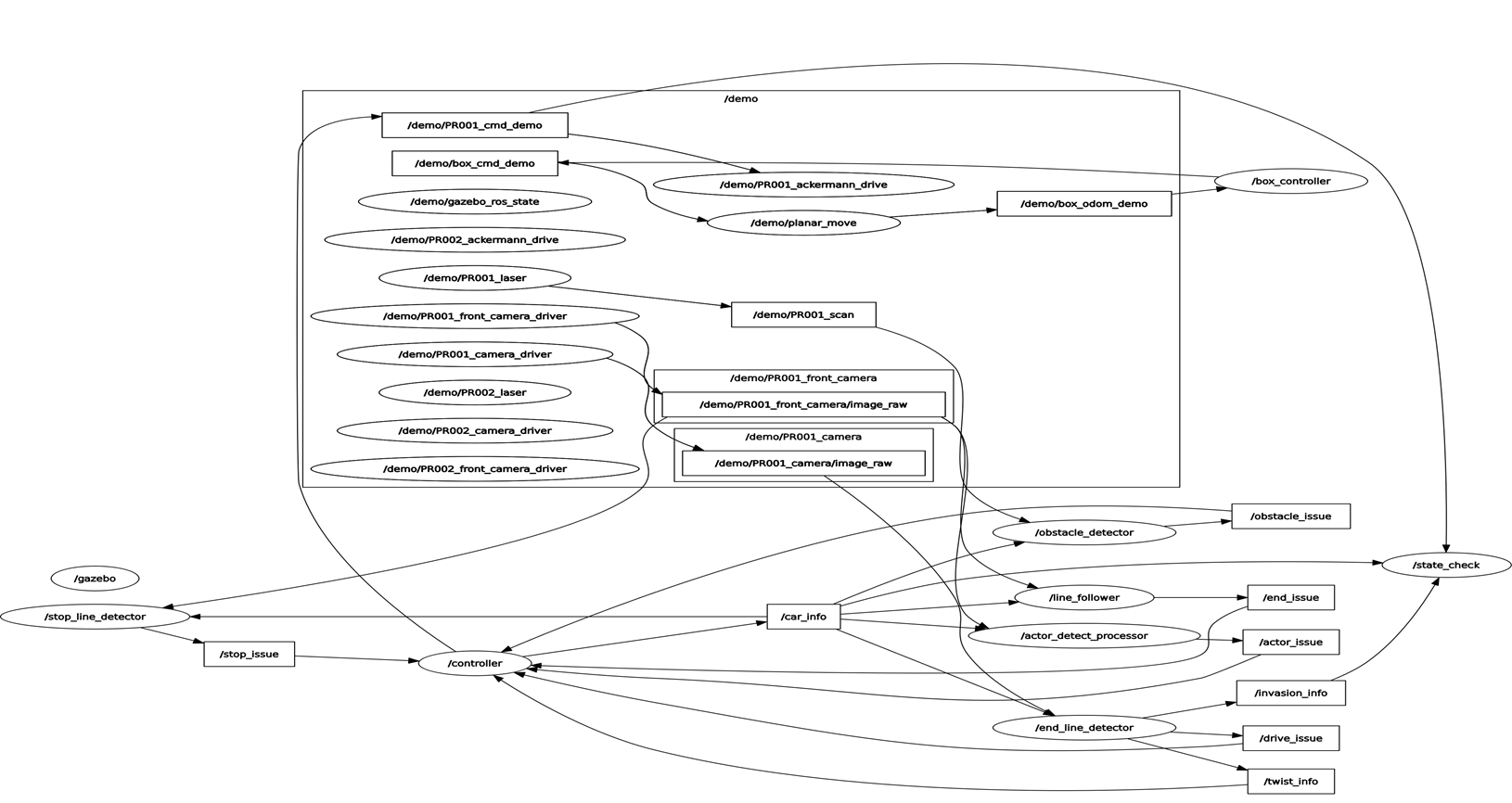
노드 구성도
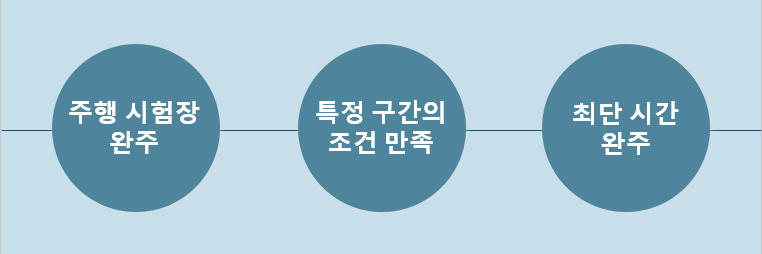
1. 주행 시험장 완주
주행 영상에서 볼 수 있듯이 차량은 모든 구간을 통과하여 종료 지점까지 완주하였다.
2. 특정 구간의 조건 만족
출발 및 차선 유지
지정된 차량이 출발할 수 있게 했으며 전체 구간동안 차선을 유지하며 주행할 수 있게 하였다.
정지선
평지 정지선, 언덕 정지선 모두 1m 이내에 정차 후 3초간 기다린 뒤 출발할 수 있게 하였다.
육면체 장애물
장애물을 인식하고 정차 후 장애물이 주행 경로 상에서 빠져나갔을 경우 이동하게 하였다.
보행자
보행자를 인식하고 정차 후 보행자가 주행 경로 상에서 빠져나갔을 경우 이동하게 하였다.
종료 지점
종료 마크를 인식하고 1m 이내에 정차 후 테스트를 종료할 수 있게 하였다.
주행 시간도 준수하게 기록하였다.

안녕하세요~ 저도 gazebo와 ros2를 사용해서 자율주행 시뮬레이션 프로젝트를 진행 중입니다. 궁금한 점이 있어 댓글 남깁니다.
혹시 가제보에서 제공하는 prius_hybrid 모델을 사용하신 거 같은데, 이 모델을 ros로 직접 제어하신 건가요? 저는 이 모델에 ros2 플러그인을 추가해서 키보드 명령으로 움직이는 것 말고, 터미널에서 ros2 topic pub ~ 명령어로 제어하는 걸 시도하고 있는데, 모델이 움직이지를 않아서요,,ㅎ
혹시 어떤 방식으로 차량 제어하셨는지 알려주실 수 있나요?