
10주차 과제: 멀티쓰레드 프로그래밍
📌 목표
자바의 멀티쓰레드 프로그래밍에 대해 학습하세요.
📌 학습할 것
- Thread 클래스와 Runnable 인터페이스
- 쓰레드의 상태
- 쓰레드의 우선순위
- Main 쓰레드
- 동기화
- 데드락
📜 시작에 앞서
- 백기선 님의 라이브 스터디(2020년 11월부터 2021년 3월까지) 커리큘럼을 따라 진행한 학습입니다
- 뒤늦게 알게 되어 스터디 참여는 못했지만 남아있는 스터디 깃허브 주소와 유튜브 영상을 참고했습니다
📑 Thread 클래스와 Runnable 인터페이스
- 쓰레드 구현 방법
Thread클래스를 상속Runnable인터페이스 구현
Thread 클래스
//Thread 클래스 상속
public class ThreadCreation extends Thread {
@Override
public void run(){
//작업 내용
System.out.println(Thread.currentThread().getName());
}
public static void main(String[] args) {
System.out.println(Thread.currentThread().getName());
ThreadCreation threadCreation = new ThreadCreation();
threadCreation.start();
}
}
/*
실행결과
main
Thread-0
*/run()외에도 오버라이드할 수 있는게 많다extends이미 했기 때문에 확장성 아쉽
Runnable 인터페이스
//Runnable 인터페이스 구현
class ThreadCreation1 implements Runnable {
@Override
public void run() {
System.out.println(Thread.currentThread().getName());
}
public static void main(String[] args) {
System.out.println(Thread.currentThread().getName());
Runnable rannablThread = new ThreadCreation1();
Thread threadCreation = new Thread(rannablThread);
//위 두줄 한 줄로 하면
//Thread threadCreation = new Thrad(new rannablThread());
threadCreation.start();
}
}
//Runnable 익명 클래스
class ThreadCreation2 {
public static void main(String[] args) {
System.out.println(Thread.currentThread().getName());
new Thread(new Runnable(){
@Override
public void run() {
System.out.println(Thread.currentThread().getName());
}
}).start();
}
}
//Runnable 람다
class ThreadCreation3 {
public static void main(String[] args) {
System.out.println(Thread.currentThread().getName());
new Thread(() -> System.out.println(Thread.currentThread().getName())).start();
}
}
/*
실행결과
main
Thread-0
*/run()만 오버라이드 가능extends가능
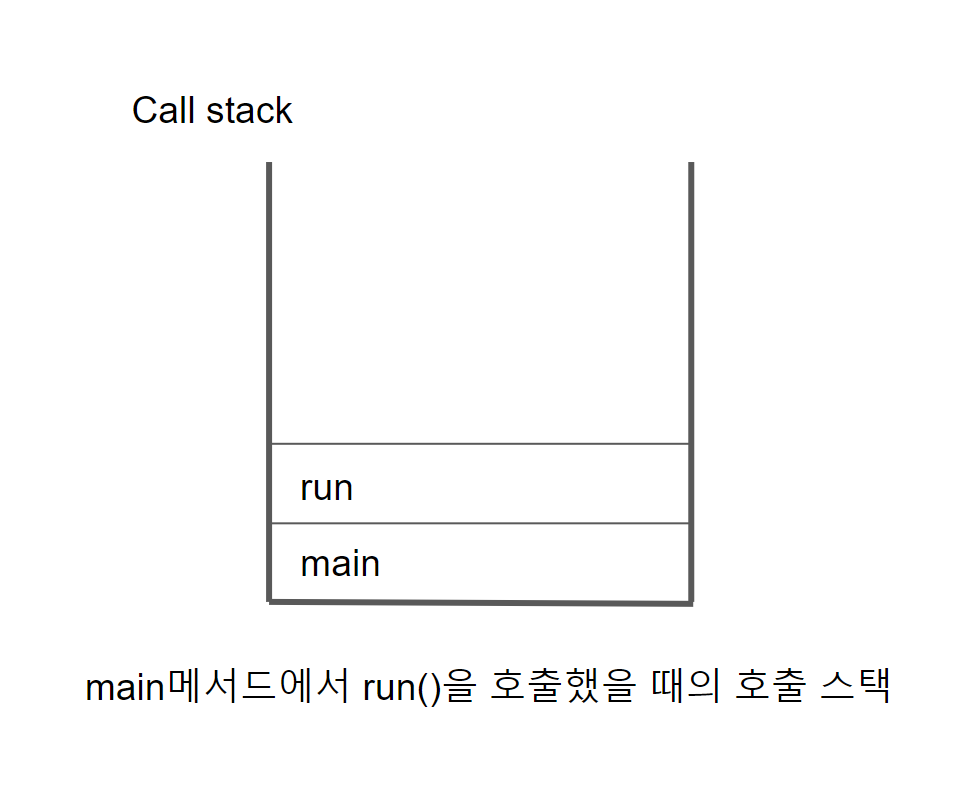
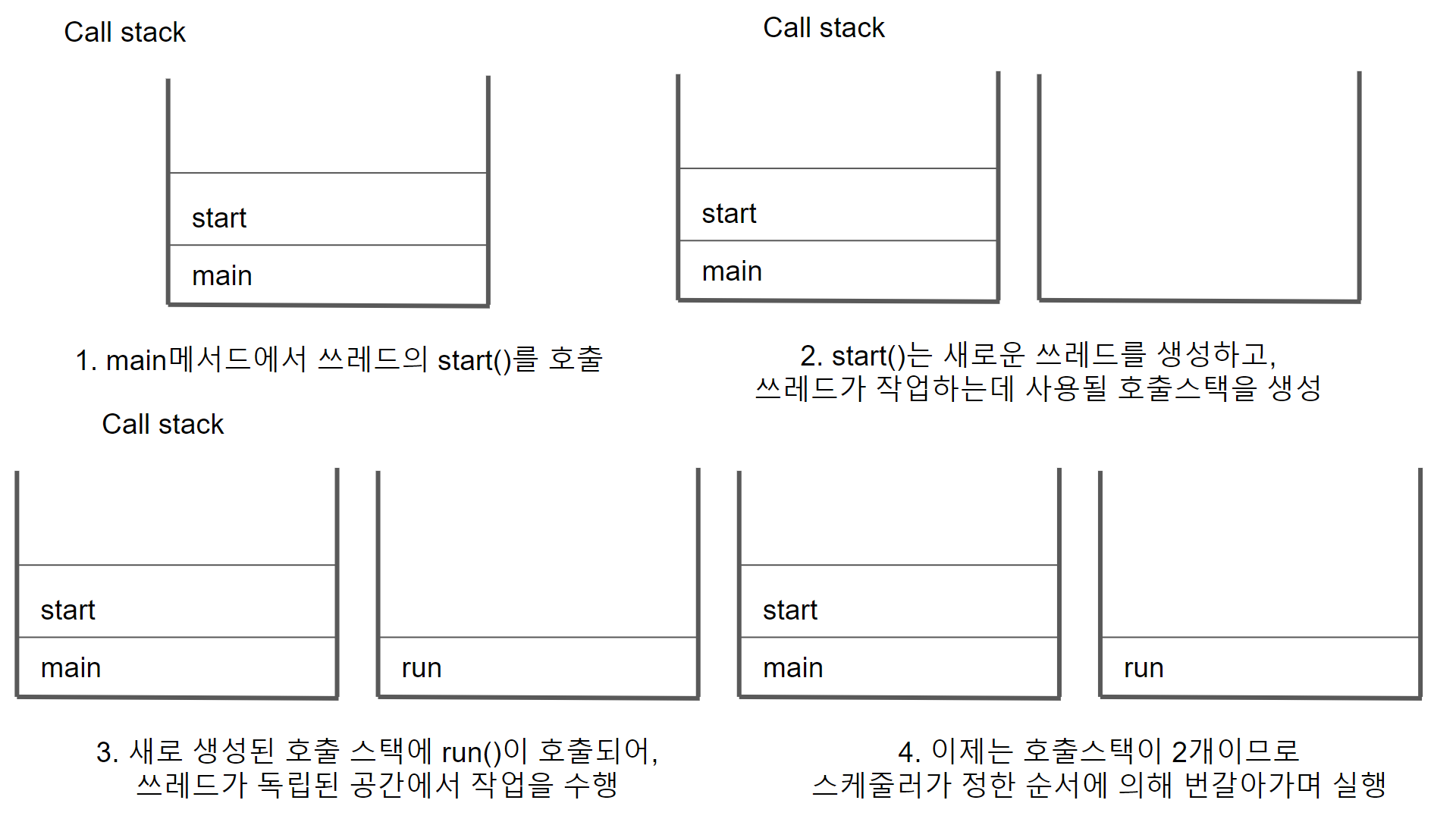
쓰레드 실행
start()메서드로 쓰레드를 실행대기 상태로 만들며, 해당 쓰레드는 자기 차례가 되면 실행
출저: 자바의 정석
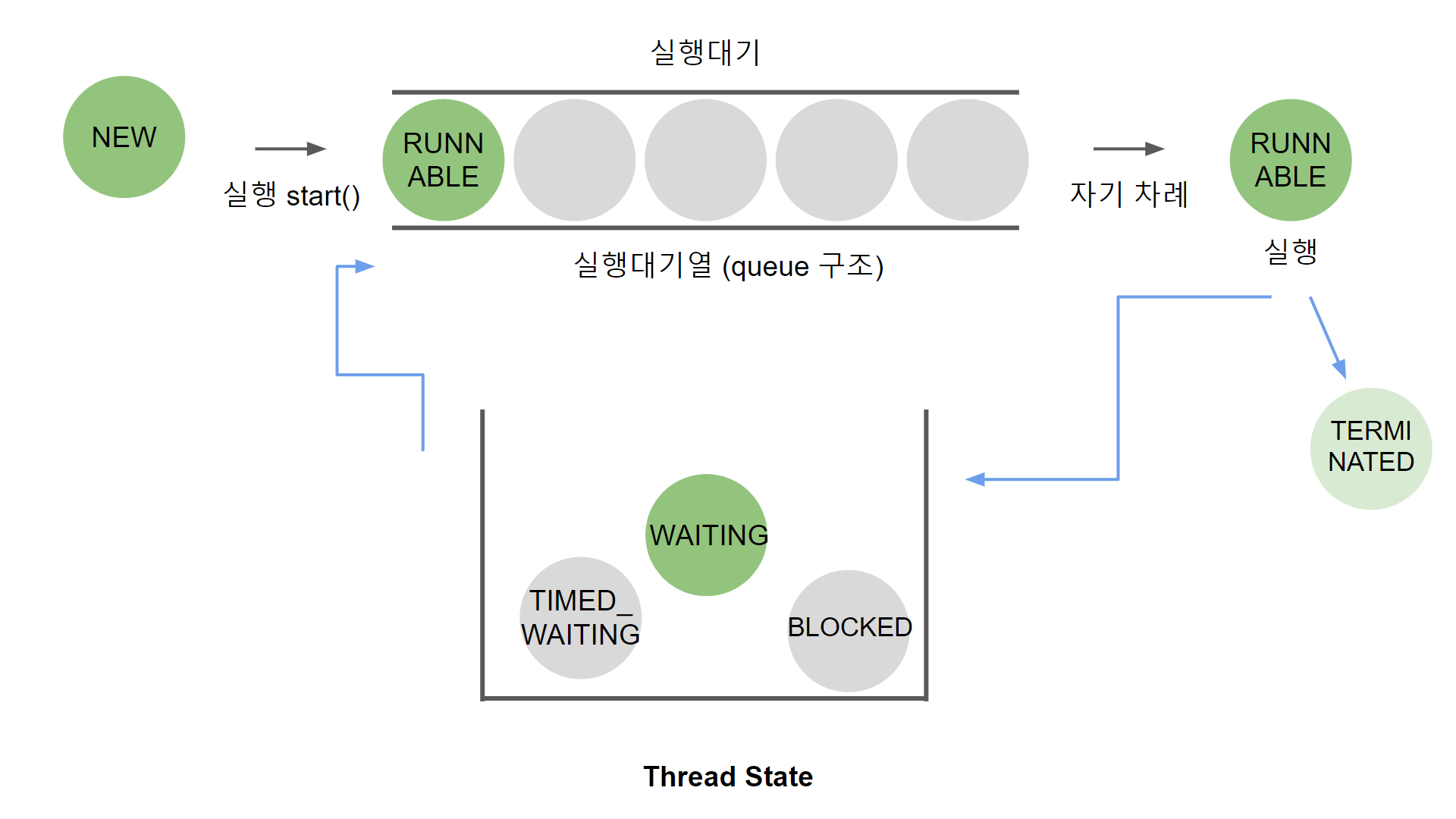
📑 쓰레드의 상태
- 쓰레드의 상태는
getState()메서드로 확인 가능하며, 리턴값은Thread.StateEnum - 쓰레드는 하나의 상태에만 속한다
Thread.State은 가상 머신에서의 상태이며 OS 쓰레드 상태를 반영하지 않는다
Thread.State
| Enum Constant | 설명 |
|---|---|
| NEW | 쓰레드가 시작되지 않은 상태 |
| RUNNABLE | JVM이 실행중인 상태(실행 대기 포함) |
| BLOCKED | lock이 풀리기를 기다리는 상태 |
| WAITING | 다른 쓰레드가 특정 작업을 수행할 때까지 무기한 대기 중인 상태 |
| TIMED_WAITING | 다른 쓰레드가 작업하도록 지정한 시간 동안 대기 중인 상태 |
| TERMINATED | 쓰레드가 종료된 상태 |
java.lang.Thread는 실행제어를 위한 다양한 메서드 제공java.lang.Object에도wait()notify()등 쓰레드 실행제어 관련 메서드 제공
📑 쓰레드의 우선순위
- 쓰레드의 우선순위는 쓰레드의
priority라는 멤버변수 값에 따라 결정 - 쓰레드의 우선순위 관련 상수
java.lang.Thread필드public static final int MAX_PRIORITY = 10최대 우선순위 10public static final int MIN_PRIORITY = 1최소 우선순위 10public static final int NORM_PRIORITY = 5
- 쓰레드 우선순위
priority의 범위는 1~10 - 쓰레드 우선순위가 높을 수록 상대적으로 더 많은 작업 시간을 할당 받는다
- 쓰레드의 우선순위는 기본적으로 쓰레드를 생성한 쓰레드로부터 상속 받는다
- 우선순위를 변경하려면
setPriority(int priority)메서드 사용
📑 Main 쓰레드
- 자바 프로그램을 실행하면 main쓰레드 자동으로 실행
- 자동으로 생성되는 최초 쓰레드이기 때문에 이외 쓰레드는 모두 main쓰레드의 자식 쓰레드
- main 쓰레드의 우선순위는
NORM_PRIORITY로5이므로 자식 쓰레드도 기본값은 이와 같다
- main쓰레드는 main() 메서드가 있는지 확인하고 실행
- 일반적으로 메인쓰레드에서 여러 종료 작업을 수행하므로 마자막에 종료되는 쓰레드
- 실행중인 사용자 쓰레드가 없을 때 프로그램이 종료된다
📑 동기화
- 멀티쓰레드 프로세스는 여러 쓰레드가 프로세스 내의 공유 자원에 접근
- 이때 한 쓰레드가 작업을 마치기 전에 다른 쓰레드가 동시에 같은 자원에 접근해 작업을 수행한다면 결과에 영향을 미침
- 한 쓰레드가 사용중인 공유 자원에 대한 다른 쓰레드의 조작을 막는 것이 동기화
- 이렇게 하나의 쓰레드만 특정 자원에 접근 허용할 코드 영역을 임계 영역(critical section)이라 한다
- 이때 하나의 쓰레드만 자원에 접근할 수 있게 하는 것은 lock인데, 모든 객체는 lock을 하나씩 가지고 있다.
- 객체의 lock을 가지고 있는 쓰레드만 임계 영역의 코드를 수행할 수 있다
- 여기서는
synchronized키워드를 이용한 동기화에 대해서만 살펴본다
synchronized
//메서드에 synchronized 키워드 사용
public synchronized void method(){
...
}- 메서드 전체가 임계영역
- 메서드에 포함된 객체의 lock을 얻어 작업 수행 후 메서드 종료시 lock 반환
//블럭에 synchronized 키워드 사용
synchronized(lock_얻을_참조변수){
...
}- 블럭 전체가 임계영역
- 블럭 영역 안에서 지정한 객체에 대한 lock을 얻고, 블럭을 나가면 lock 반환
- 메서드 전체에
synchronized사용하는 것보다 임계 영역 최소화해 성능 최적화 가능
📑 데드락
- 두 개 이상의 작업이 원하는 자원을 얻지 못해 진행이 멈춘 상태
발생 조건
아래 4가지 조건이 모두 만족하면 교착 상태 발생
- 상호 배제(Mutual exclusion) : 자원 자체를 동시에 쓸 수 없는 경우
- 점유 상태로 대기(Hold and wait) : 특정 자원을 점유한 상태로, 다른 자원을 추가로 점유하기 위해 대기하는 경우
- 선점 불가(No preemption) : 특정 자원을 강제로 빼앗아 사용할 수 없는 경우
- 순환성 대기(Circular wait) : 자원을 필요로하는 이들이 각각 순환적으로 다른 이들의 자원을 요구하는 경우
📑📌📜✏️
