접근
이 문제는 백준의 배추벌레와 비슷한 문제입니다.
그 문제는 배추가 있을 때 전진했고 상하좌우로 다 가능하지만
이 문제는 상하좌우로 이동이 가능하지만
장애물이나 벽에 부딪히기 전까지는 계속 한 방향으로 전진한다는 차이점이 있습니다.
사실 로봇 청소기를 생각하면 쉬울거 같습니다.
로봇청소기도 계속 나아가다 장애물을 만나면 turn을 하기 때문입니다.
문제에 주어진 예시를 그림으로 표현해보았습니다.
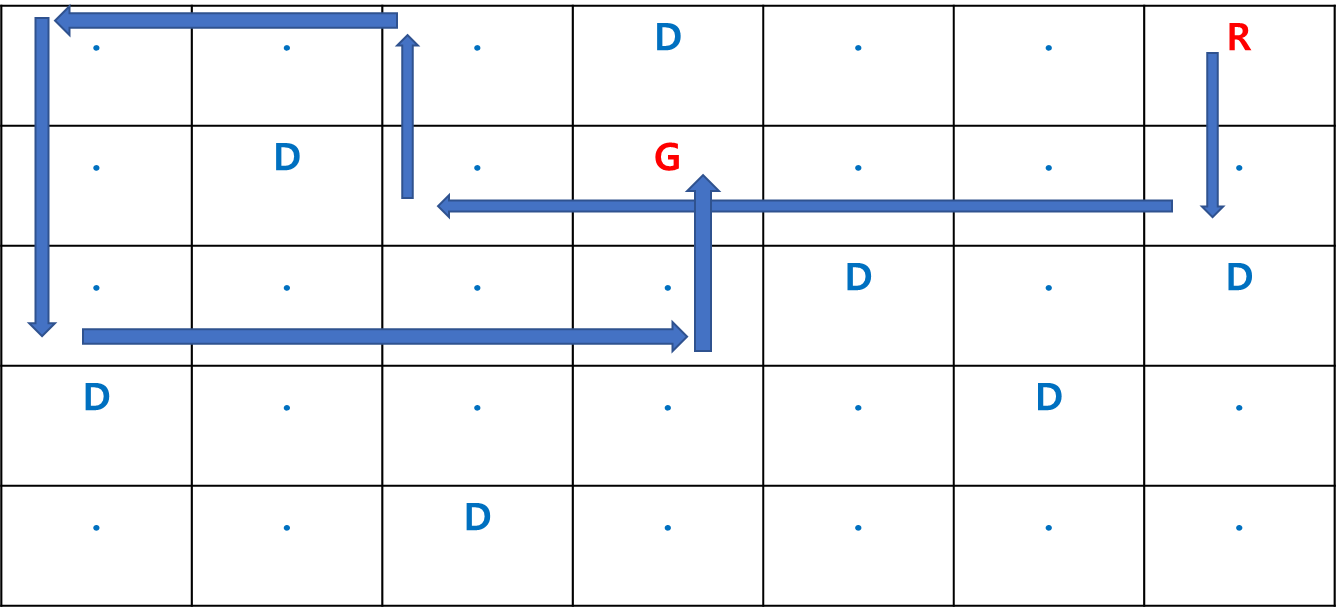
위와 같이 "."으로 된 곳으로 이동이 가능하고 D를 만나면 방향을 바꿀 수 있도록 하는 조건문,
그리고 하나의 상태배열이 필요합니다.
저의 경우 D를 중심으로
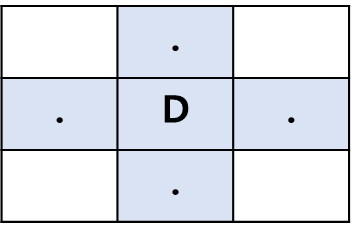
상하좌우를 check하며 들렸던 곳인지 아닌지를 판단했습니다.
풀이
import java.util.*;
class Solution {
static int[] nx = {-1,1,0,0};
static int[] ny = {0,0,-1,1};
static char[][] pan;
static int min = Integer.MAX_VALUE;
static boolean[][] visited;
static class XY{
int x;
int y;
int cnt=0;
public XY(int x, int y, int cnt){
this.x=x;
this.y=y;
this.cnt=cnt;
}
}
public int solution(String[] board) {
int answer = 0;
pan= new char[board.length][board[0].length()];
XY start = new XY(0,0,0);
for(int i=0;i<board.length;i++){
for(int j=0;j<board[0].length();j++){
char target = board[i].charAt(j);
pan[i][j] =target;
if(target=='R'){
start = new XY(i,j,0);
}
}
}
visited= new boolean[pan.length][pan[0].length];
bfs(start);
if(min==Integer.MAX_VALUE) return -1;
return min;
}
static void bfs(XY start){
Queue<XY> q = new LinkedList<>();
q.offer(start);
while(!q.isEmpty()){
XY robot = q.poll();
if(pan[robot.x][robot.y]=='G'){
if(min>robot.cnt){
min=robot.cnt;
}
}
for(int i=0;i<4;i++){
int j=0;
int newX = 0;
int newY = 0;
// newX와 newY는 판의 범위까지
// 만약에 D이면 스톱
while(true){
j++;
newX = robot.x + nx[i]*j;
newY = robot.y + ny[i]*j;
if(newX>=0 && newX <pan.length && newY >=0 && newY <pan[0].length){
if(pan[newX][newY]=='D') break;
}else break;
}
// System.out.println(robot.x+nx[i]*(j-1)+","+robot.y+ny[i]*(j-1));
if(!visited[robot.x+nx[i]*(j-1)][robot.y+ny[i]*(j-1)]){
q.offer(new XY(robot.x+nx[i]*(j-1),robot.y+ny[i]*(j-1), robot.cnt+1));
visited[robot.x+nx[i]*(j-1)][robot.y+ny[i]*(j-1)]=true;
}
} //for
}//while
}
}
꾸준하게 Ready, Set, Go!