B=(b1,⋯,bn)가 벡터공간 V의 기저일 때, x∈V는 유니크한 선형결합 x=α1b1+⋯+αnbn으로 표현할 수 있다.
여기서 α1,⋯,αn은 B에 대한 x의 좌표이고
α=⎣⎢⎢⎡α1⋮αn⎦⎥⎥⎤∈Rn
α를 B에 대한 x의 좌표 벡터(coordinate vector) 또는 좌표 표현(coordinater representation)이라고 한다.
좌표계에서 x의 좌표는 기저 벡터들을 어떻게 선형결합해야 x를 표현할 수 있는지를 알려준다. 그러므로 동일한 벡터에 대해서 기저가 다르면 좌표도 다르다.
🤔: 벡터를 어떤 막대의 길이로 생각하고 기저를 길이를 표현할 단위로 생각하면 좋을 듯. 막대의 길이는 고정이고 m, ft, inch 등 어떤 단위를 사용하냐에 따라서 표현이 달라진다.
변환 행렬 transformation matrix
먼저 n차원 벡터공간 V와 V의 기저 B=(b1,⋯,bn)에 대해서 Φ:Rn→V, Φ(ei)=bi는 선형 변환이다.
🤔: ?
벡터공간 V,W의 기저가 각각 B=(b1,⋯,bn),C=(c1,⋯,cm)이고 선형 변환 Φ:V→W이 있을 때, Φ(bj)=α1jc1+⋯+αmjcm=∑i=1mαijci 는 C에 대해서 유니크한 선형 결합으로 표현된다.
여기서 AΦ(i,j)=αij인 (m, n) 행렬 AΦ를 Φ의 변환 행렬이라고 한다. C에 대한 Φ(bi)의 좌표는 AΦ의 i 번째 열이다.
x^이 B에 대한 x∈V의 좌표이고 y^이 C에 대한 y=Φ(x)∈W의 좌표일 때,
y^=AΦx^
변환 행렬은 한 벡터공간의 좌표를 다른 벡터공간의 좌표로 맵핑할 수 있다. (두 벡터공간의 기저에 의존적이다.)
🤔: x^=[x1^⋯xn^]⊤이라면 x=x1^b1+⋯+xn^bn이고 Φ(x)==x^1(α11c1+⋯+αm1cm)+⋯+x^n(α1nc1+⋯+αmncm)(α11x^1+⋯+α1nx^n)c1+⋯+(αm1x^1+⋯+αmnx^n)cm y^=⎣⎢⎢⎡α11x^1+⋯+α1nx^n⋮αm1x^1+⋯+αmnx^n⎦⎥⎥⎤=AΦx^ AΦ는 Φ(x)를 선형 결합으로 표현할 때 W의 기저벡터들이 얼마나 필요한지 보여준다.
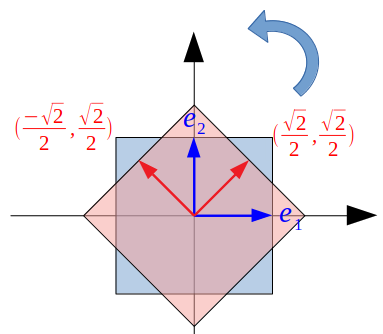
🤔: 벡터 회전시키기
같은 공간에서 기저를 회전시키면 될 듯 Φ(e1)=22e1+22e2 Φ(e2)=−22e1+22e2 AΦ=[2222−2222]=[cos(4π)sin(4π)−sin(4π)cos(4π)]
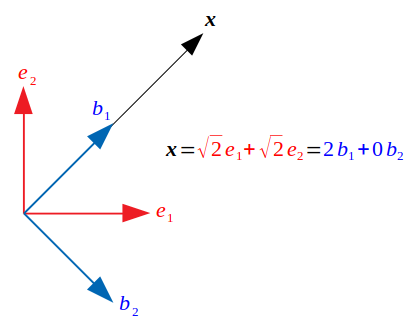
🤔: 동일한 벡터를 다른 기저로 표현
데카르트 좌표계에서 x=(2,2),b1=(22,22),b2=(22,−22) Φ(e1)=22b1+22b2 Φ(e2)=22b1−22b2 AΦ=[222222−22] B=(b1,b2)에 대한 x의 좌표는 AΦx=(2,0)