환경 : ubuntu 22.04, ros2
센서 : Alvium 1800 U-240 usb
[ros2 driver 설치]
git clone https://github.com/alliedvision/vimbax_ros2_driver.git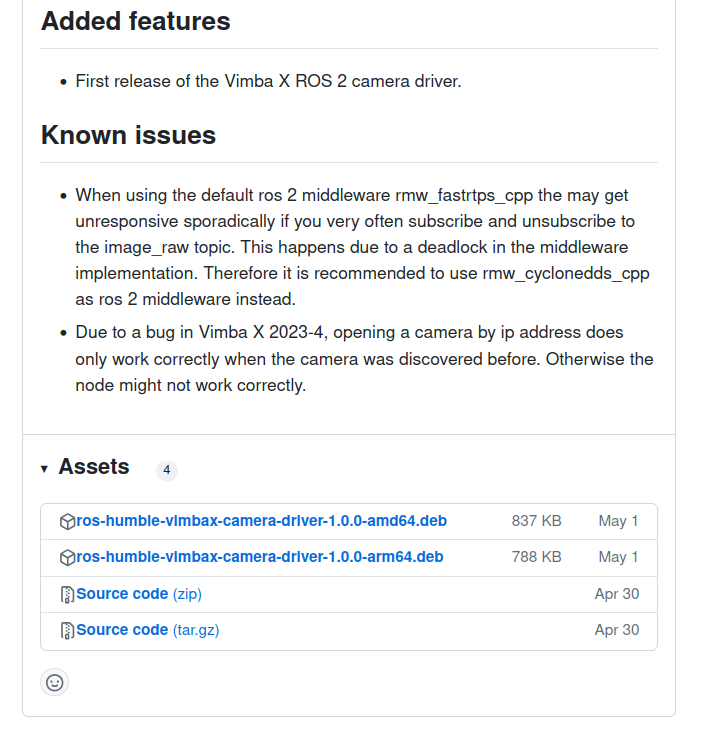
드라이버 : https://github.com/alliedvision/vimbax_ros2_driver/releases
cd ~/Downloads/
sudo apt install ./ros-humble-vimbax-camera-driver.deb 또는
cd ~/Downloads/
sudo dpkg -i ros-humble-vimbax-camera-driver-1.0.0-amd64.deb[Vimba X SDK 설치]
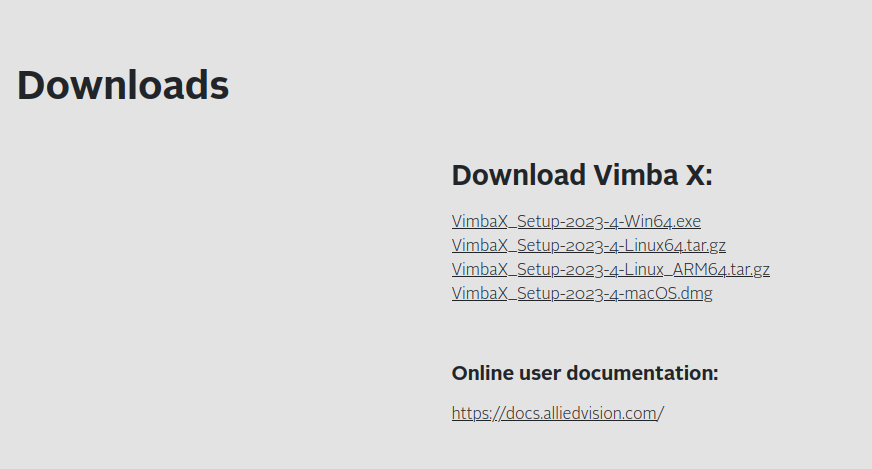
Vimba X SDK : https://www.alliedvision.com/en/products/software/vimba-x-sdk/#c13326
cd ~/Downloads
sudo tar -xzf ./VimbaX_Setup-2023-4-Linux64.tar.gz -C /opt
cd /opt/VimbaX_2023-4/cti/
sudo ./SetGenTLPath.sh && sudo ./VimbaUSBTL_Install.sh[firware update]
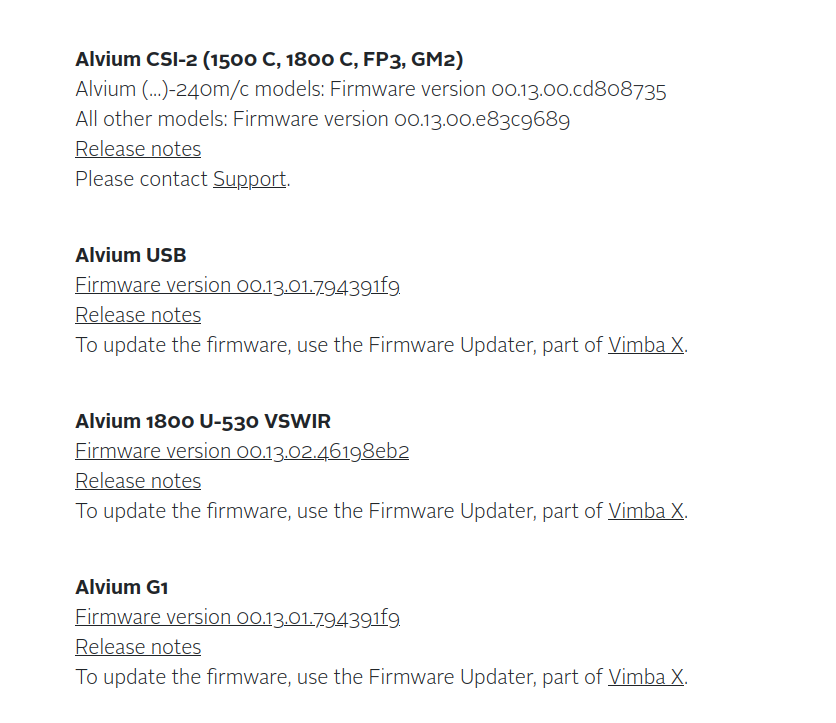
firware : https://www.alliedvision.com/en/support/firmware-downloads/
firmware download
cd /opt/VimbaX_2023-4/bin/
./VimbaXFirmwareUpdater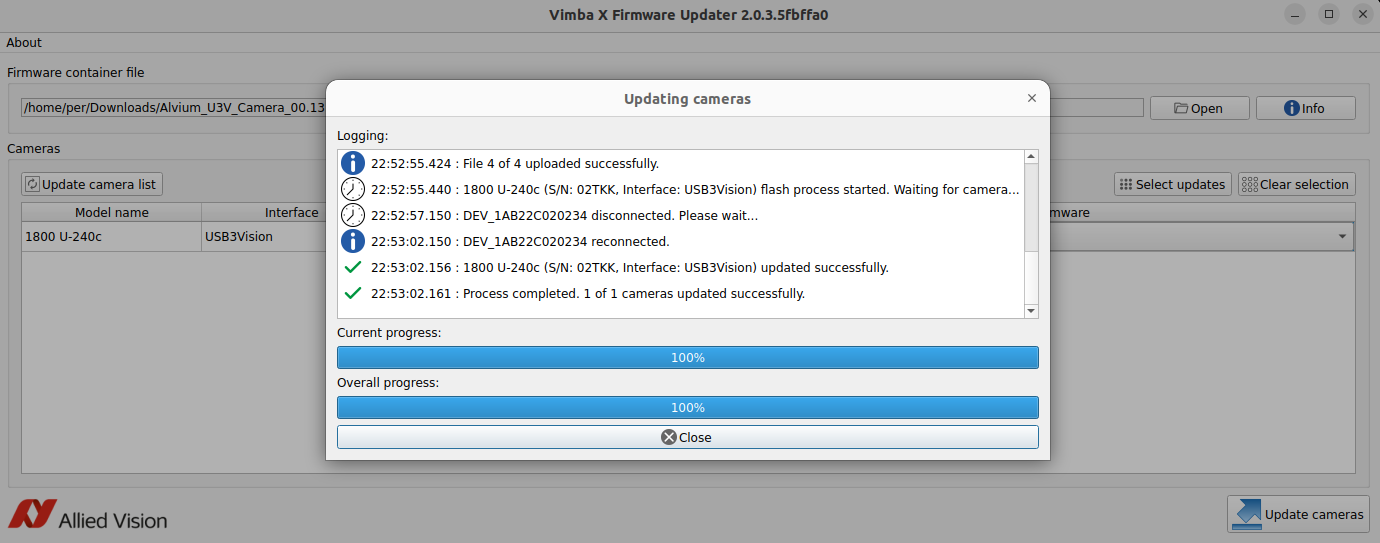
PC 재부팅 진행
cd /opt/VimbaX_2023-4/bin/
./VimbaXViewer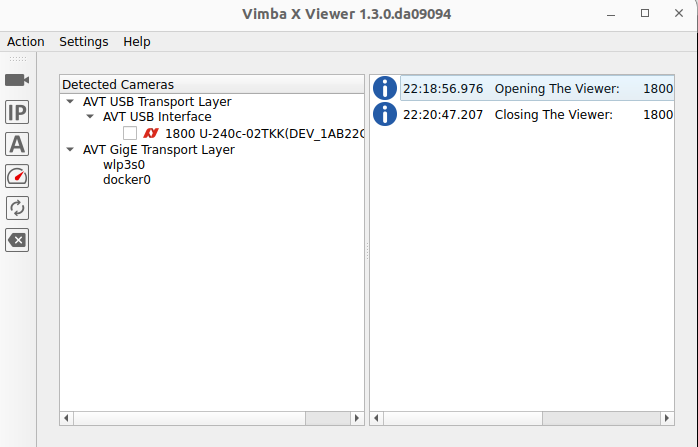
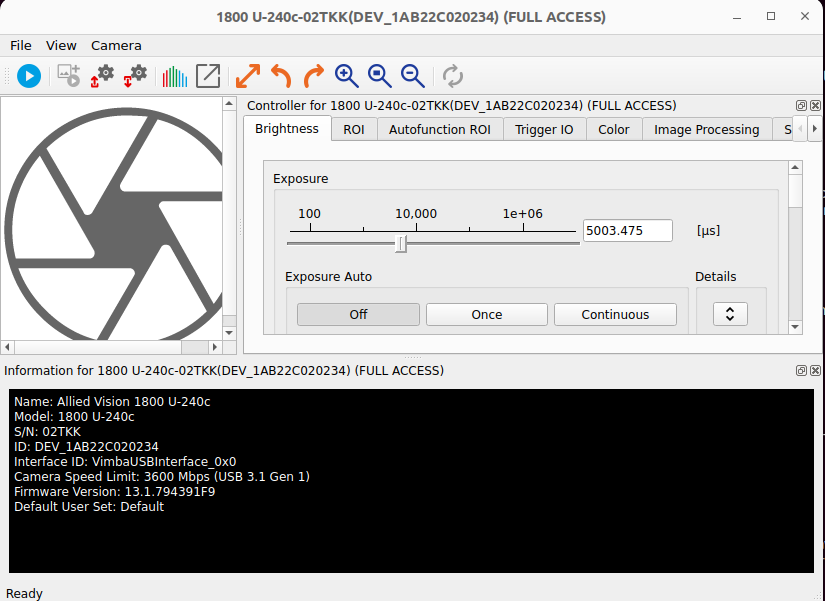
software trigger
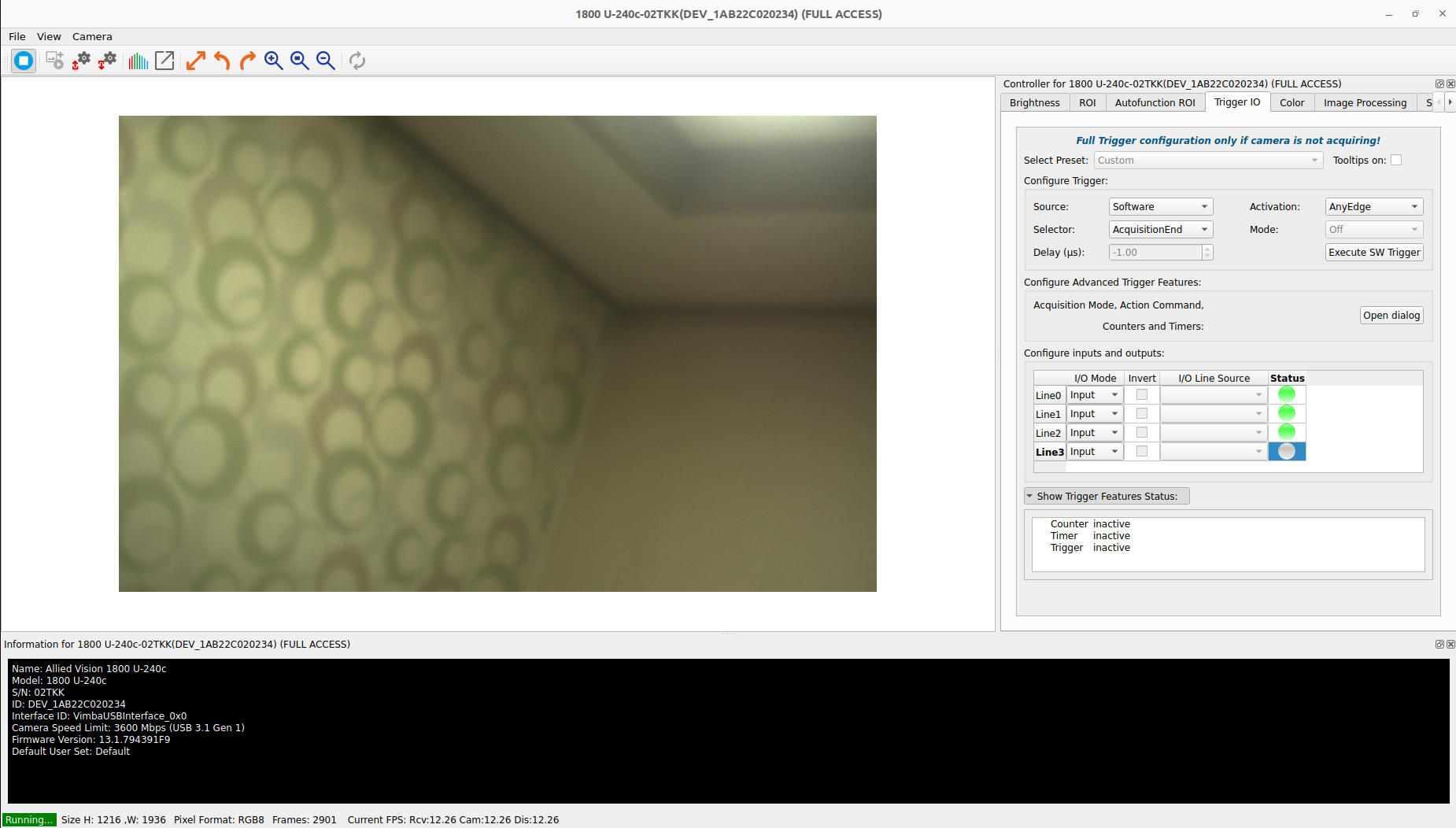
hardware trigger (GPIO)

[Run on ROS2]
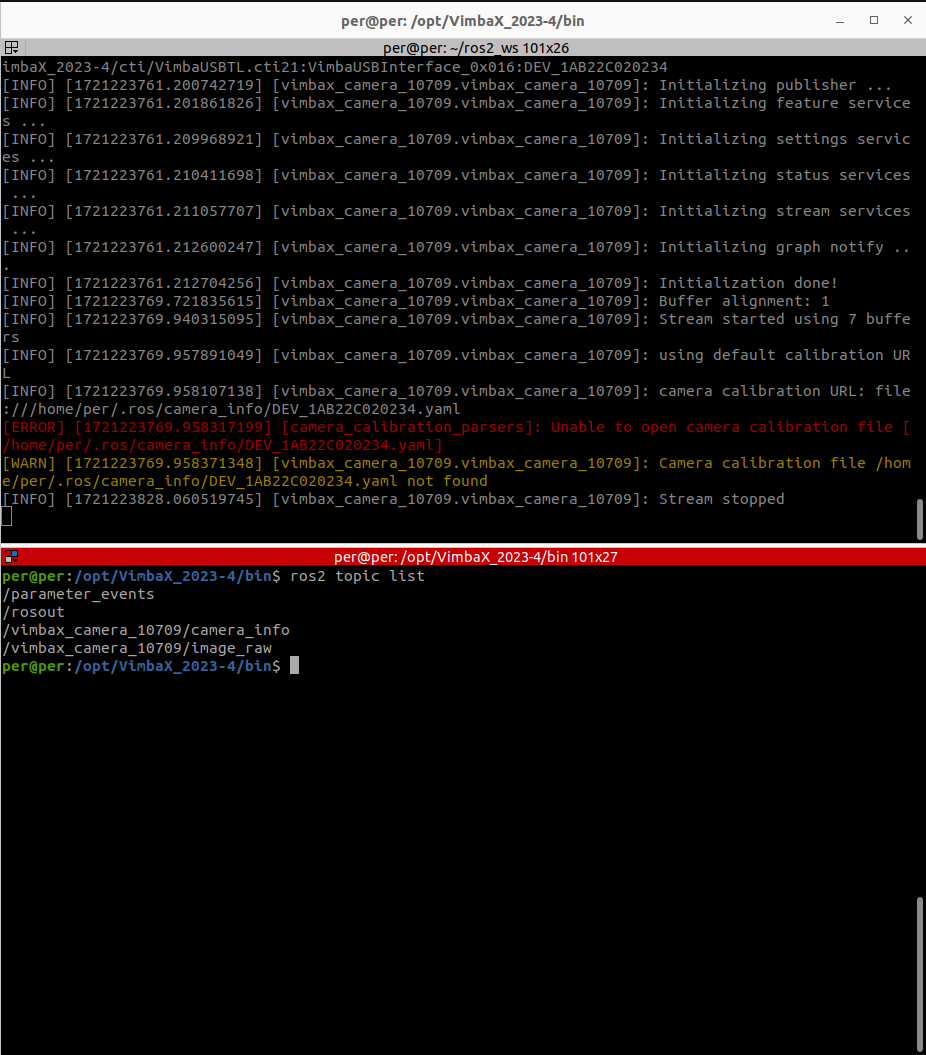
ros2 run vimbax_camera vimbax_camera_nodeview on rviz2
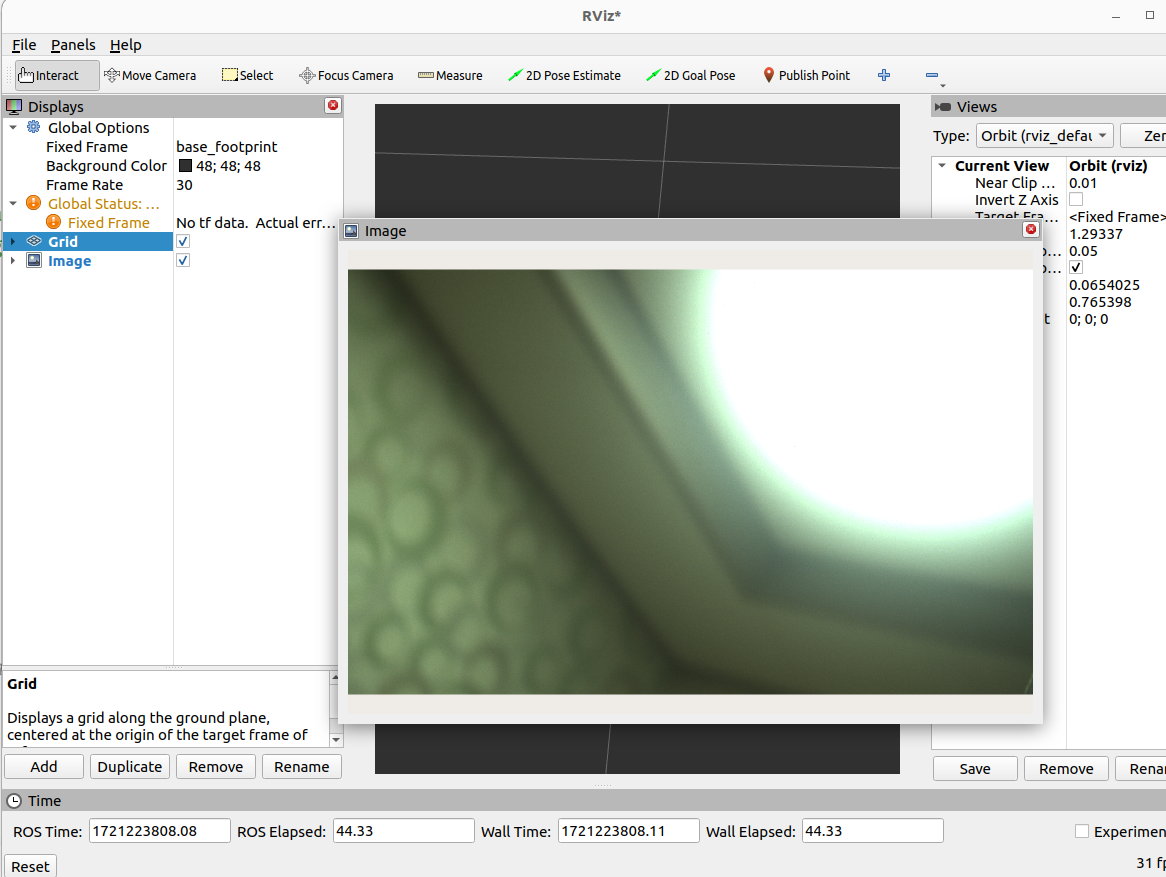
ros2 topic list