[모터를 제어하는 프로그램을 작성한다는것]
- MCU를 내가 원하는대로 조종해서 MCU 에 연결된 하드웨어를 제어하는 행위
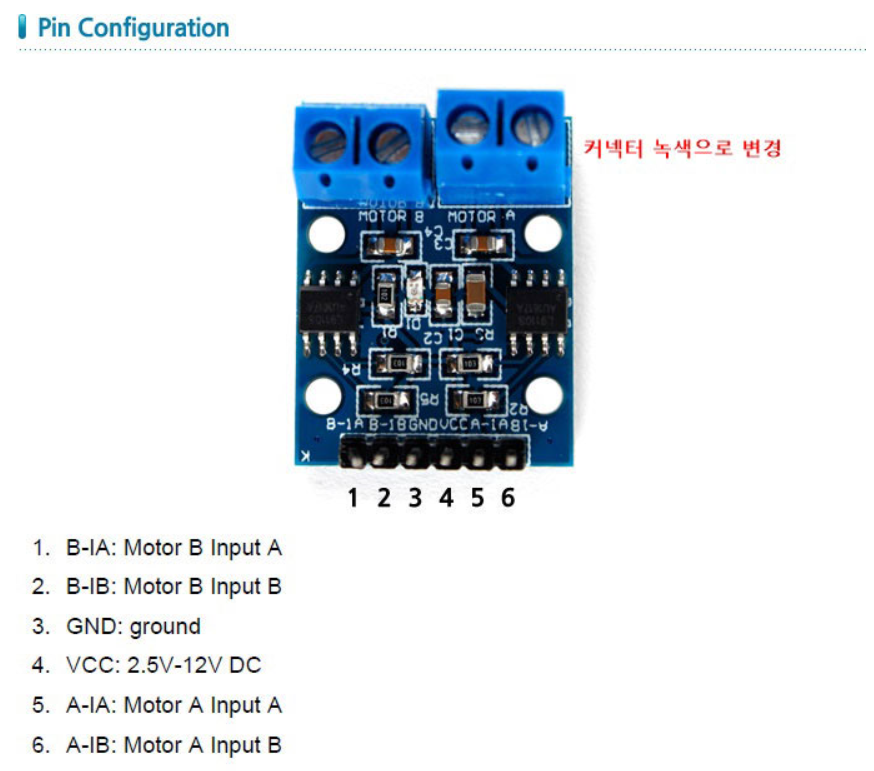
[Dual H-Bridge L9110s 모터 드라이버 모듈 [SZH-MDBL-002]]

L9110S 2채널 모터 드라이버 모듈은 소형 로봇을 구동하는 데 사용할 수 있는 소형 보드입니다. 이 모듈에는 각각 800mA의 연속 전류를 구동할 수 있는 2개의 독립적인 모터 드라이버 칩이 있습니다. 기판은 2.5~12V까지 작동하여 3.3V 및 5V 마이크로컨트롤러와 함께 이 모듈을 사용할 수 있습니다.
암 헤더 핀 세트는 이 모듈을 마이크로컨트롤러에 연결하는 데 사용됩니다. 모터는 나사 단자 두 세트를 통해 부착됩니다.
PWM 펄스 폭 변조 신호는 모터의 속도를 제어하는 데 사용되며 디지털 출력은 모터의 방향을 변경하는 데 사용됩니다. 이 모듈은 다음에도 사용할 수 있습니다.
단 4라인 2상 스테퍼 모터를 구동한다. 네 개의 구멍을 통해 로봇이나 다른 프로젝트에 이 보드를 쉽게 장착할 수 있습니다.
- 디바이스 마트 홈페이지를 캡쳐 해서 올린 것이며, 상품 페이지에 소스코드가 있다.
- 전원은 4번은 + 3번은 GND 연결 하고, 2채널이므로 모터 2개를 동시 제어가 가능하다.
- 모터 의 +- 연결에 따라 도는 방향이 다르겠지만 다음과 같이 돌리면 된다.
<정방향회전>
IA = GPIO L 혹은 PWM 0% (Active H)
IB = GPIO H 혹은 PWM (Active H)
<역방향회전>
IA = GPIO H 혹은 PWM (Active H)
IB = GPIO L 혹은 PWM 0% (Active H)
-
IA IB 는 STM32 보드의 GPIO 나 PWM 핀에 연결 하는 것이다.
-
모터 연결은 사진상 제일 위 스크류 터미널 단자에 연결 하는 것이다.
-
배터리로 구동 가능한 모터라면 배터리 박스(AA 혹은 AAA 사용하는) 을 사용 해도 된다.
-
배터리 박스에서 나오는 +(대부분적색) 은 4번핀 VCC 에 -(대부분흑색)은 3번핀 GND 혹은 STM32 GND 에 연결해줘야 한다.
-
참고로 STM32 GND 와 모터 드라이브 GND 그리고 배터리 전원인 배터리 박스 - 는 반드시 서로 연결되어야 동작한다.
https://www.devicemart.co.kr/goods/view?no=1324245
https://cafe.naver.com/carroty
https://www.youtube.com/watch?v=Vdb3i7J0DX0
https://www.youtube.com/watch?v=lug8jNQg48g
https://blog.naver.com/chgy2131/222132512576
[RDH8020S 12V 팬모터]
-
12V 배터리박스 필요
-
RDH8020S 는 블러쉬래스 쿨링팬이다.
-
이 쿨링팬은 정방향으로는 돌아도 역방향으로는 돌지 않는다.
-
즉, 일반적인 모터는 모터의 +,- 에 전원을 +,- 로 연결하면 정방향, -,+ 로 연결하면 역방향으로 돌지만 쿨링팬의 경우 +,- 로 연결해야 정방향으로만 돈다.
-
그러므로 RDH8020S 을 동작 시키는건 On/Off 혹은 PWM(쿨링팬에 따라 안될수도 있다.) 밖에 안되는 것이다. 이건 RDH8020S 같은 쿨링팬 대부분이 그렇다.
[수중펌프모터 [SZH-GNP 155]]
- 5V 배터리박스 필요
