-
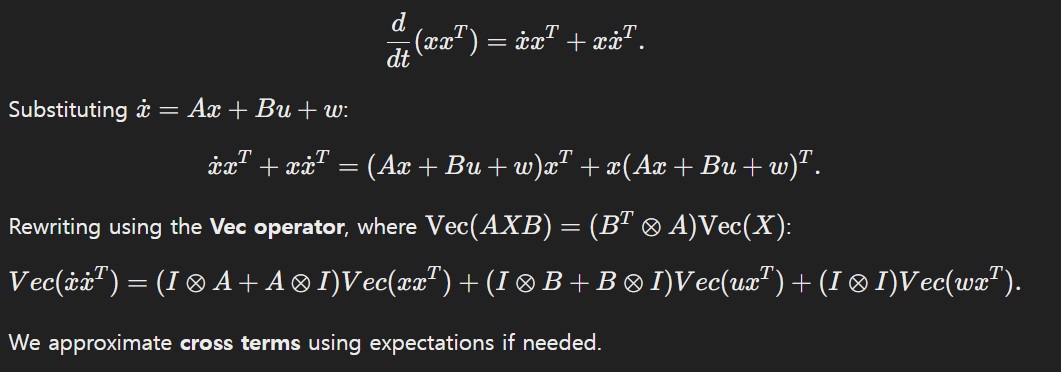
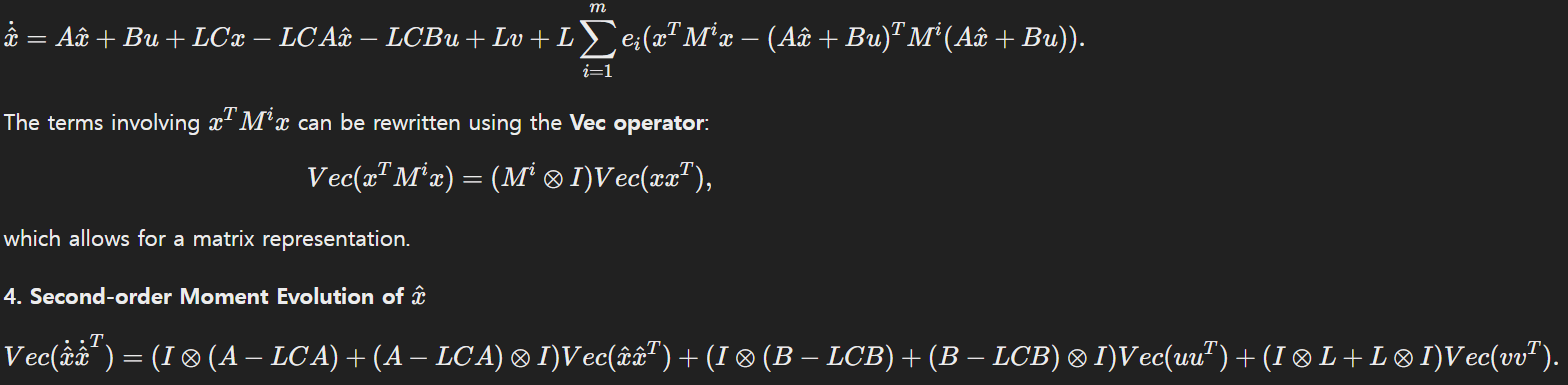
The dynamic estimator equation:
X^˙=AX+Bu+L(CX+i=1∑meiXTMiX+v−C(AX^+Bu)−i=1∑mei(AX^+Bu)TMi(AX^+Bu))
-
The system matrix equation:
⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡X˙Vec(X˙X˙T)X^˙Vec(X^˙X^˙T)eEy⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎡A000N1C0(I⊗A+A⊗I)000∑i=1mei(Mi⊗I)00I(A−LC)0N20000(I⊗(A−LC)+(A−LC)⊗I)00II⊗I000000L(I⊗L+L⊗I)0IB(I⊗B+B⊗I)(B−LCB)(I⊗(B−LCB)+(B−LCB)⊗I)00000000⎦⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡XVec(XXT)X^Vec(X^X^T)wvVec(vvT)uVec(uuT)⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
Z^S(k)=E[Z(k)∣yS(1:k)]
S⊆G,∣S∣≤lu(1:T)Smink=1∑TE[[Z(k+1)Z^S(k+1)]TQˇ[Z(k+1)Z^S(k+1)]+∥uS(k)∥Rk2]
Qˇ=[N1TN2T][N1∣N2],R=I,
eE=xE−x^E=[I00−I00]⎣⎢⎢⎢⎢⎢⎢⎢⎡xExSVec(XXT)x^Ex^SVec(X^X^T)⎦⎥⎥⎥⎥⎥⎥⎥⎤=[N1∣N2][ZZ^]