omniverse isaac sim과 isaac sdk를 연결해서 진행해보려고 한다.
튜토리얼을 살펴보자.
도커에서 다음과 같이 치자
bob@desktop:~/isaac/sdk$ bazel run apps/navsim/navsim_navigate -- --map_json apps/assets/maps/virtual_test_warehouse_1.json또한 omniverse에서 omni:/Isaac/Samples/Isaac_SDK/Scenario/str_dolly_warehouse_with_forklifts.usd 를 찾아서 실행해보자.
에러중 다음과 같이 20.04에러가 나오긴 하지만 로봇은 제대로 돌아갔다. 해서 이부분은 문제가 없다고 생각하자.
2022-02-10 11:00:36.536 ERROR external/com_nvidia_isaac_engine/engine/alice/components/Codelet.cpp@229: Component '_check_operating_system/isaac.alice.CheckOperatingSystem' of type 'isaac::alice::CheckOperatingSystem' reported FAILURE:
Isaac requires Ubuntu 18.04 while the host has Ubuntu 20.04.
2022-02-10 11:00:36.536 ERROR external/com_nvidia_isaac_engine/engine/alice/backend/event_manager.cpp@43: Stopping node '_check_operating_system' because it reached status 'FAILURE'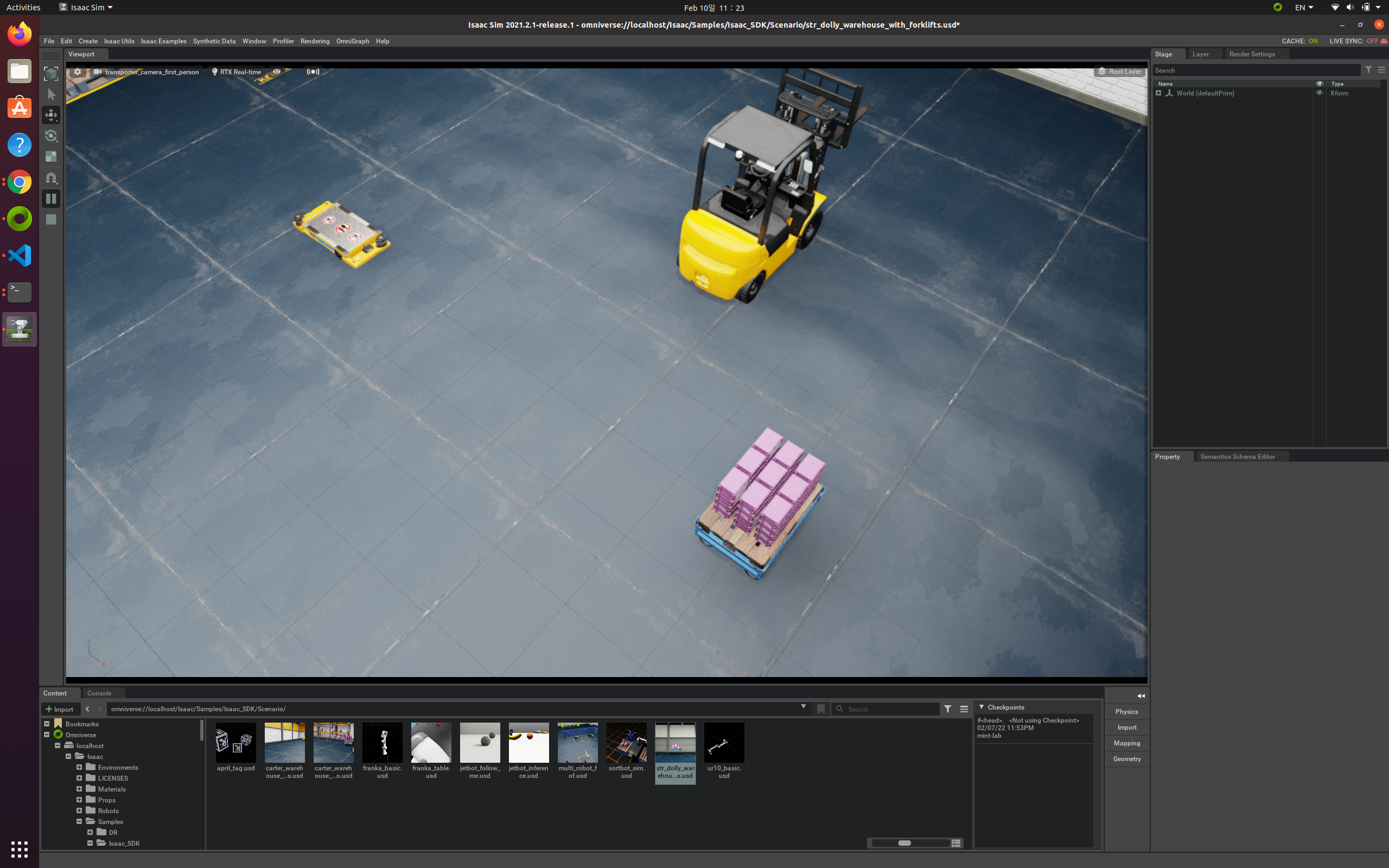
치명적 단점
Isaac sdk는 RTX 30xx를 지원하지 않는다. 해서 이러한 부분들은 해결 가능하지 못하니 본인의 그래픽카드를 새로구매하던가, 아니면 deep learning을 사용하지 않으면 되겠다.
[ref]
- isaac sdk with omniverse isaac sdk, [isaac sdk docs]
- omniverse isaac sdk bridge,i.e bridge extensions, [omniverse docs]
- isaac sdk cuda error, [cuda version error]
- Isaac Jetbot Sample, [jetbot sample]
- Isaac training in docker, [training sample]

3D Vision, VSLAM, Robotics, Deep_Learning