ROS_Tip
1.ROS bag play in python

이를 이용하여 launch file에서도 실행해보자.이와 같이 rosbag을 파이썬으로 node name을 부여하여 play 할 수 있다.refhttps://stackoverflow.com/questions/23330228/subprocess-commands-
2021년 12월 21일
2.YDlidar 사용
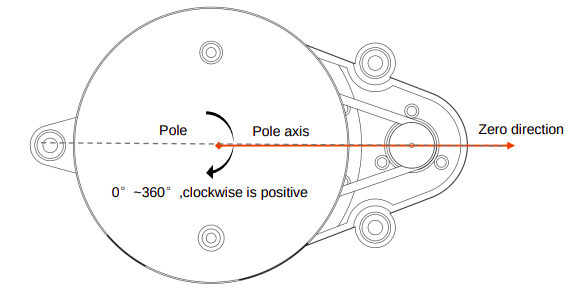
YDlidar X4제품을 ROS1 melodic 과 함께 사용했다. 하지만 우리 차체 특성상 전방위를 볼 수 없고, 약 70 ~ -75' 사이만 볼 수 있었다. 또한 뒤집어서 장착했기에 관련 파라미터 수정에 대해 간단히 보고 가자.slam이나 navigation는 보통
2021년 12월 21일
3.ros capture image
2021년 12월 21일
4.ros arduino test
2021년 12월 21일