FreeRTOS상에서 2개의 LED On/Off
- FreeRTOS 환경 생성
- Task1에서 100ms 주기로 LED On/Off
- Task2에서 "UNIST 자기이름"을 Tera Term에 출력
- Task3에서 User 입력 버튼에 따라 적색 LED를 On/Off
Pin Map
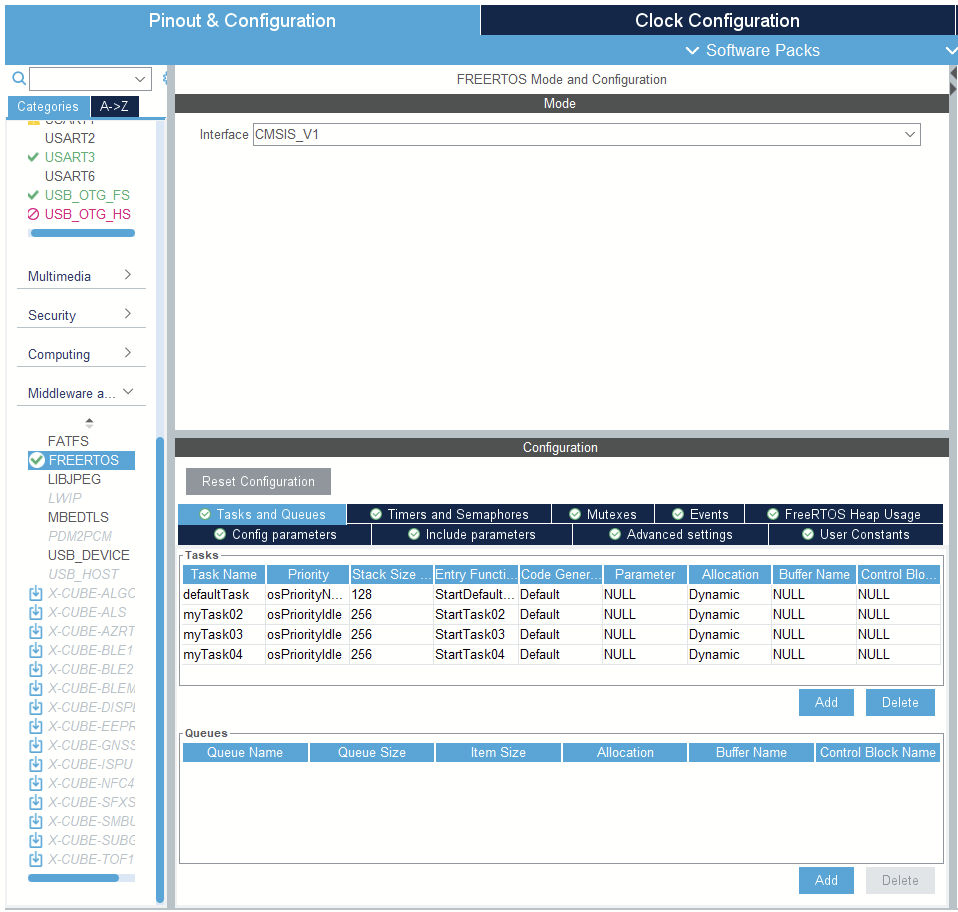
- ETH Disabled
- FREERTOS : CMSIS_V1
: Task 4개 생성
Code
- Thread 생성
/* Create the thread(s) */
/* definition and creation of defaultTask */
osThreadDef(defaultTask, StartDefaultTask, osPriorityNormal, 0, 128);
defaultTaskHandle = osThreadCreate(osThread(defaultTask), NULL);
/* definition and creation of myTask02 */
osThreadDef(myTask02, StartTask02, osPriorityIdle, 0, 256);
myTask02Handle = osThreadCreate(osThread(myTask02), NULL);
/* definition and creation of myTask03 */
osThreadDef(myTask03, StartTask03, osPriorityIdle, 0, 256);
myTask03Handle = osThreadCreate(osThread(myTask03), NULL);
/* definition and creation of myTask04 */
osThreadDef(myTask04, StartTask04, osPriorityIdle, 0, 256);
myTask04Handle = osThreadCreate(osThread(myTask04), NULL);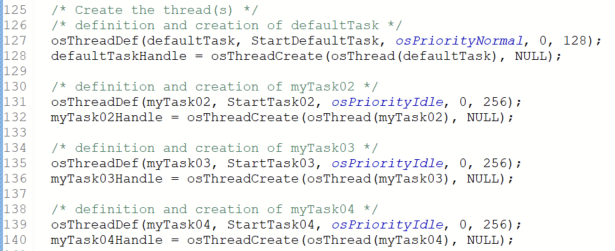
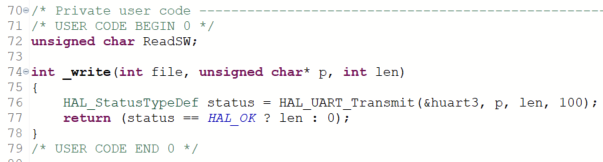
main.c
#include <stdio.h>
unsigned char ReadSW;
int _write(int file, unsigned char* p, int len)
{
HAL_StatusTypeDef status = HAL_UART_Transmit(&huart3, p, len, 100);
return (status == HAL_OK ? len : 0);
}
void StartTask02(void const * argument)
{
for(;;)
{
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
osDelay(100);
}
}
void StartTask03(void const * argument)
{
for(;;)
{
printf("UNIST Jaewhoon Cho\r\n");
osDelay(100);
}
}
void StartTask04(void const * argument)
{
for(;;)
{
if(HAL_GPIO_ReadPin(USER_Btn_GPIO_Port, USER_Btn_Pin))
{
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_SET);
}
else
{
HAL_GPIO_WritePin(LD3_GPIO_Port, LD3_Pin, GPIO_PIN_RESET);
}
osDelay(1);
}
}
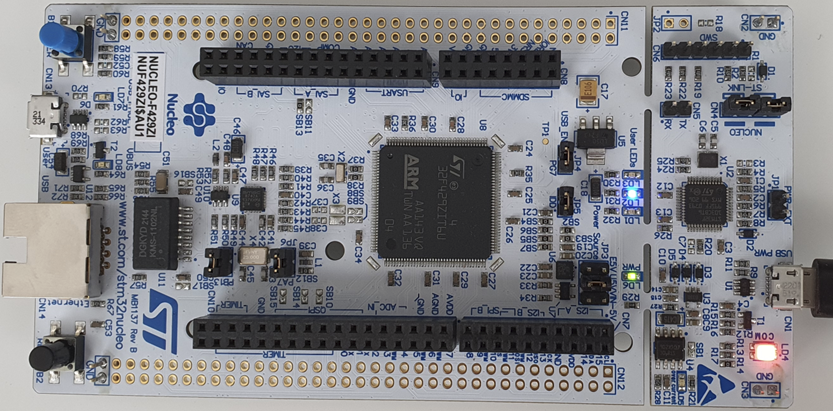
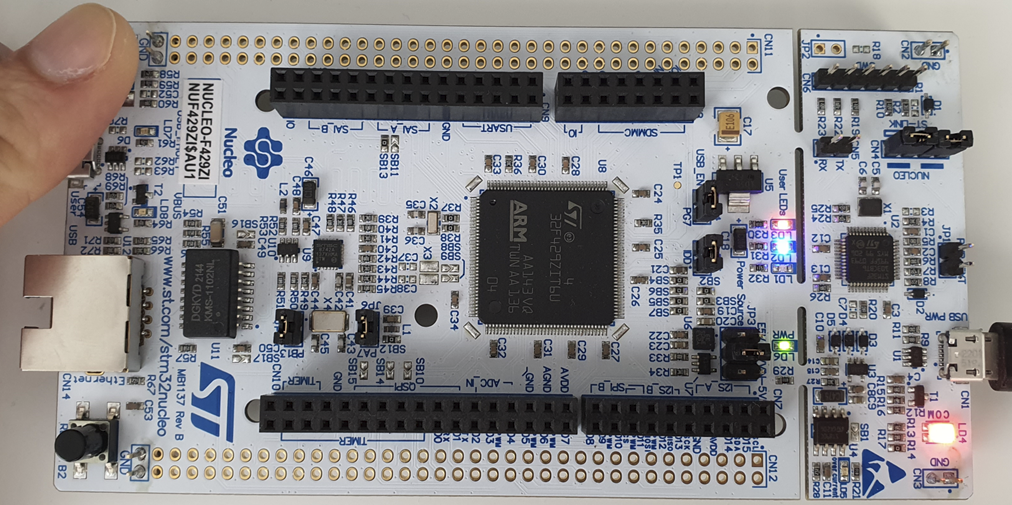
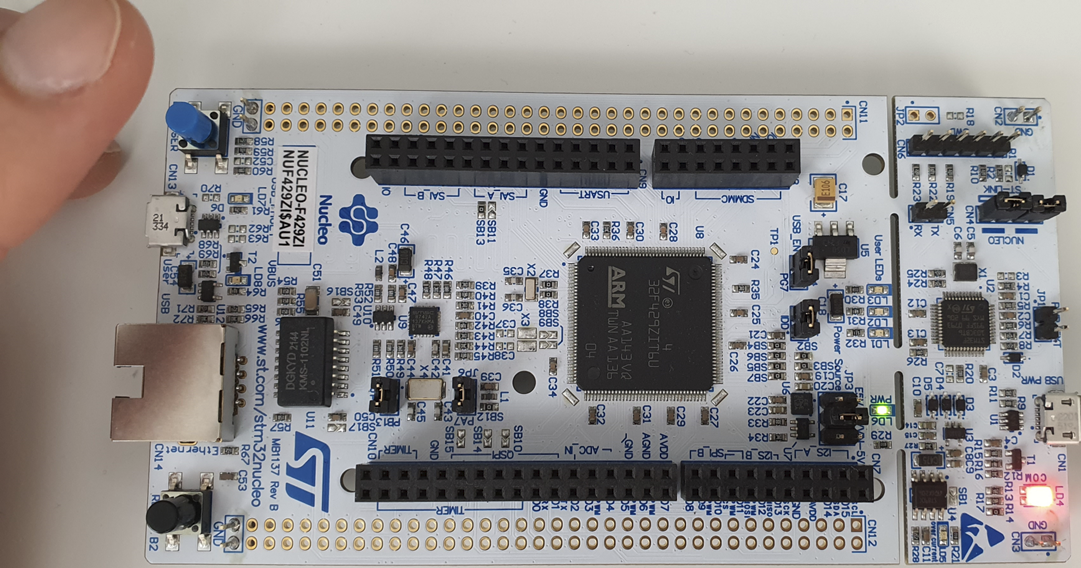
코드 실행
LED 점등
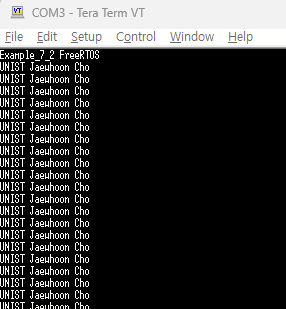
Tera Term 출력

맨땅에 헤딩. 인생은 실전.