A. Resolver Outline
레졸버란
: 입력에 일정한 크기와 주파수를 가지는 정현파 전압을 인가하고 서로 직교하는 위치에 설치된 두 개의 코일로부터 출력신호를 받아 회전자의 절대위치를 검출하는 위치 검출기
- 레졸버 입출력 신호는 아날로그 신호이며, 위치 추정을 위해 R/D 변환이 필요
: 여자신호 입력을 위해 별도의 여자증폭기가 필요할 수 있음
: 각도 추정의 정밀도 및 안정도 향상을 위해 추가 증폭기(Amplifier)를 사용 - R/D 변환 및 위치 추정 검증을 위해 별도의 소자 및 회로 구성이 필요할 수 있음
- Motor(etc.) 레졸버 RDC DSP
- 자동차, 전동기 및 발전기 등에서는 사용하기 좋음
- 빠른 응답특성을 요구하는 서보(Servo) 모터 제어에 적합 X, [1]
레졸버 원리
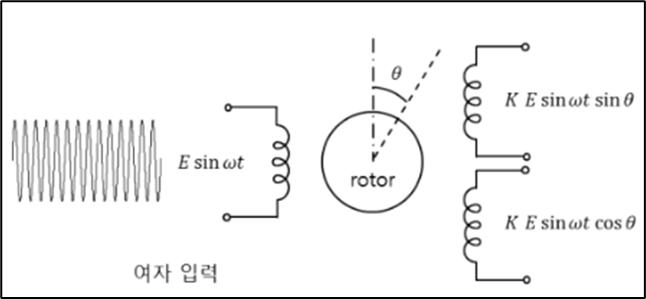
- 레졸버 입력 :
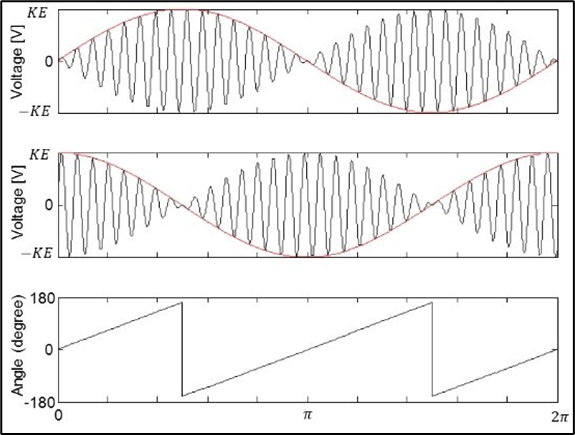
- 레졸버 출력
:
: - RDC를 사용하지 않고 MCU를 사용하여 레졸버 입출력을 연산하는 방법도 존재, [2]
B. Resolver 각도 계산
- 제어 편차 : ㆍㆍ
여기서, "" 되면, ""가 성립 " 추정 가능"
1. RDC의 각도 추정 원리
- RDC(Resolver Digital Converter) : 리졸버 신호(아날로그)를 디지털 신호로 변환
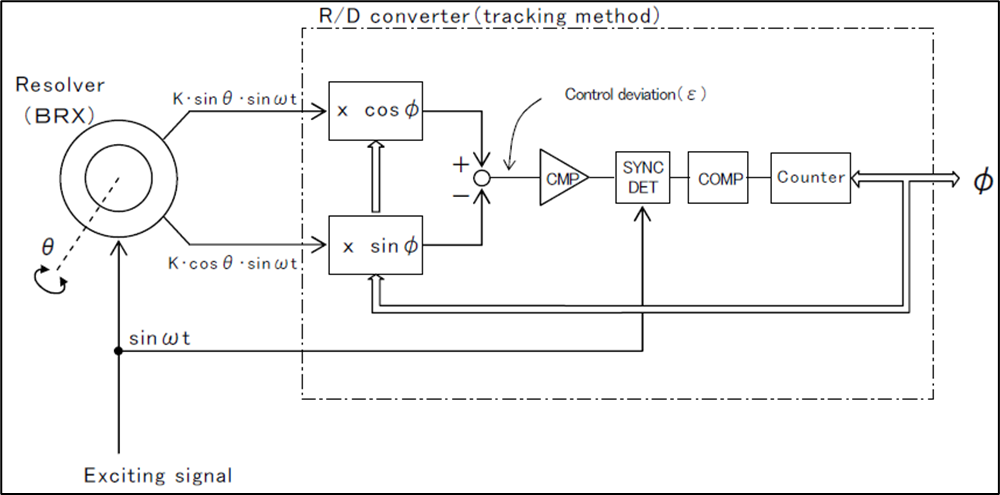
- 제어편차() 계산을 위해 레졸버 출력에 피드백 , 를 곱함
( 은 비교기에 의해 인코딩되어 성분이 SYNC 검출로 제거됨)
Kㆍ ㆍ cos$ ㆍ
Kㆍ ㆍ
만약, 제어편차가 일 경우 추정위치와 회전자 위치는 같음
2. 추정 방법
1) PI제어를 통한 추정
- 실제 각도() 와 추정 각도()가 비슷하다고 가정하면, 아래와 같이 사인 함수를 무시할 수 있음.
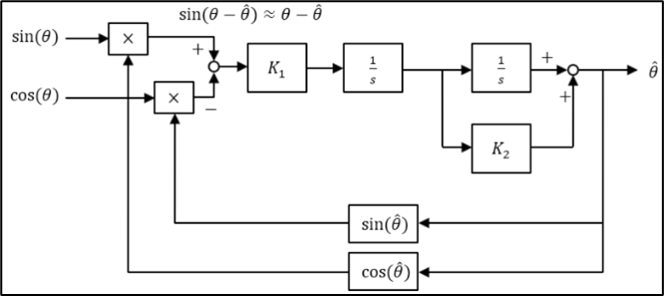
간략화
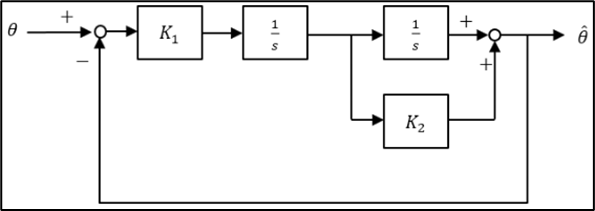
-
위 블록도를 전달함수로 나타내면,, ()
-
이를 일반적인 2차 전달함수의 표현과 비교하여 제어 이득을 얻을 수 있음
2) 삼각함수로 계산
- 레졸버 출력에서 삼각함수 공식을 통해 직접 구하는 경우
- RDC에서 지원하는 SIN, COS 출력 pin을 통해 레졸버 입력파형과 비교하여 검증, [C-2.]
ex) RDC - COSMNT or SINMNT 와 R1 or R2 입력파형 비교
C. Resolver Signal Input Circuit
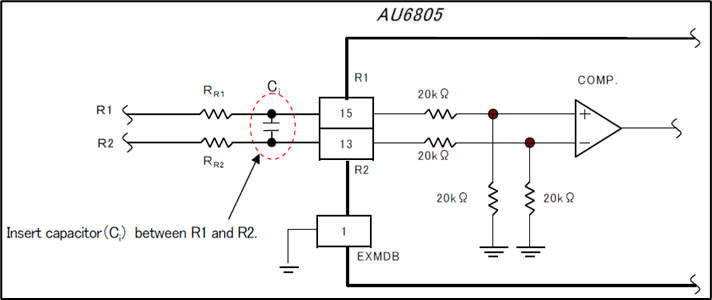
1. 외부 입력 회로 (외부 여자의 경우)
- RDC는 외부입력(R1, R2) 여자신호와 위상신호의 동기 검출 기능이 필요
- R1, R2는 레졸버 캐리어 신호와 함께 같은 위상을 가져야 함
- 여자 신호가 VCC를 초과하면 오류 발생 가능 분압저항을 통해 VCC 전압을 낮춤
- 외부 여자 전원 사용시 - "EXMDB" pin 설정 : "L"
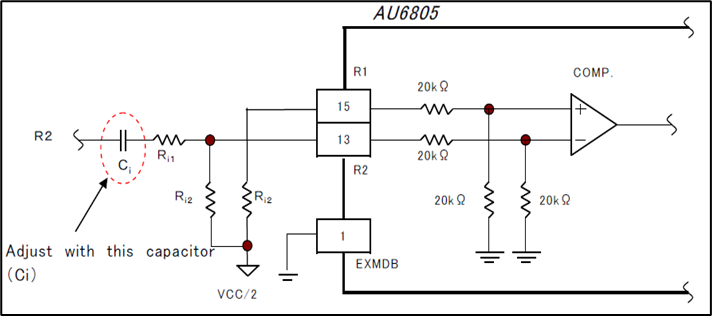
(1) 기본 회로 예시(단일 전원으로 외부 여자 전원 사용 시)
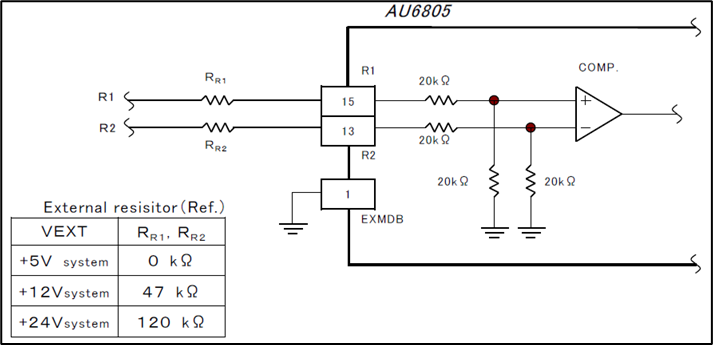
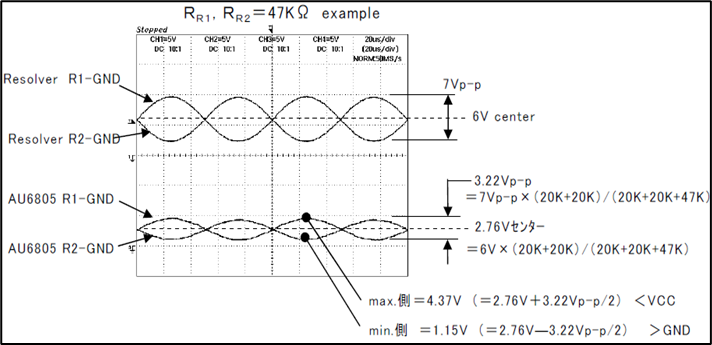
: R1, R2 파형 예시
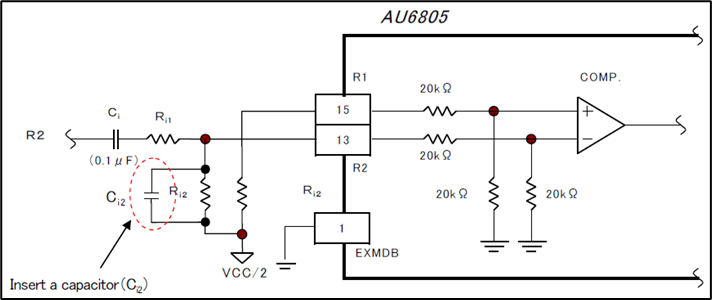
(2) 기본 회로 예시(이중 전원으로 외부 여자 전원 사용 시)
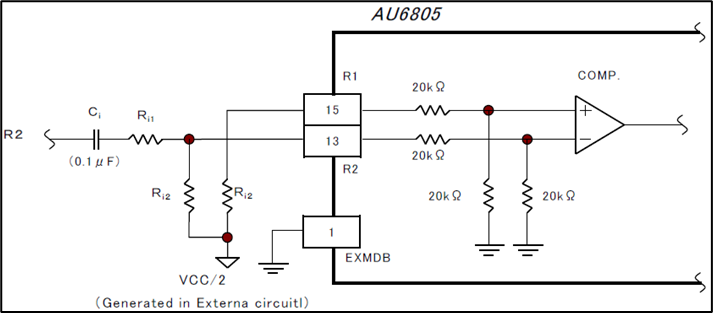
-
여자 신호는 0V가 중심에 위치하게 됨, (R1, R2 파형 예시 참조)
: R1/R2 단자 입력의 DC레벨을 이동시켜야 함 -
조건
DC Cut capcitor()
약 ( 의 10% 정도)
진동 중심 값 [V] = VCC /2 [V]
진폭 레벨 [V] = R2 [V]
파동 max. 값 = (진동 중심) (진폭 레벨)/2 VCC
파동 min. 값 = (진동 중심) (진폭 레벨)/2 0V
2. 위상 천이 고려 시
- 일반적으로 자동 보정이 되지만 +=45º 이상 차이의 경우 정확도가 떨어짐
- 단자전압이 0V~VCC 범위를 초과할 경우, 오류 발생 분압저항 사용
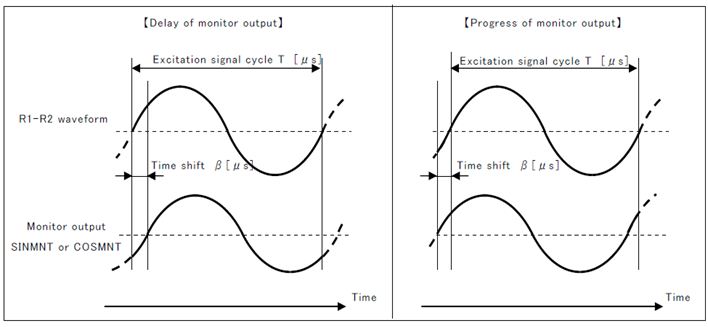
- 위상차 :
① 단일 전원(진상) : [degree]
: 조정을 위한 캐패시터를 추가
② 단일 전원(지상) : [degree]
③ 이중 전원(지상) : [degree]
D. RDC 주변 회로 설계
- RDC 출력은 12bit로 나오나 그 이후 DSP에 바로 연결할 수 없음 --????
- Bus Transceiver를 활용하여 연결
- RDC Transceiver CPLD DSP
※ 부록
AU6805기능
- RDC Fault 탐지 기능
: SINMNT or COSMNT의 모니터 전압 크기가 상하한 임계값을 넘지 못할 경우 검출
: "ERR", "ERRHLD", "ERRC1~3"에서 에러코드 출력
- 다양한 RDC들을 비교 하여 선정 필요
출처 및 참조
타마가와 홈페이지 - USER Manual
https://www.tamagawa-seiki.com/products/resolver-synchro/smartcoder.html레졸버 원리 관련 네이버 자료
https://m.blog.naver.com/lagrange0115/221089405210
- Reference
[1] 설승기, "전기기기 제어론" 2016.09
[2] 서안식, 이준영, "RDC를 사용하지 않는 PMSM의 토크제어 기법" 전력전자학회 2012년도 추계학술대회 논문집
Revision. 22. 08. 04.
