-
고속 도로, 빗길, 고속(V > 100km/h) 중에
Unintended Vehicle Lateral Motion -
골목길, 눈길, 커브, 저속(V < 30km/h) 중에
Unintended Vehicle Lateral Motion -
교차로, 직진, 저속(V < 20km/h), 보행자 다수 중에
Unintended Vehicle Lateral Motion -
고속 도로, 빗길, 고속(V > 100km/h) 중에
Loss of Vehicle Lateral Motion Control -
골목길, 눈길, 커브, 저속(V < 20km/h) 중에
Loss of Vehicle Lateral Motion Control -
교차로, 직진, 저속(V < 20km/h), 보행자 다수 중에
Loss of Vehicle Lateral Motion Control
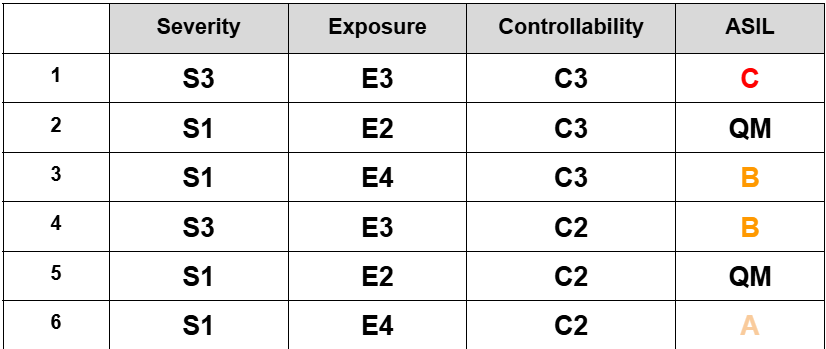
QM을 초과하는 단계는 ISO 26262에서 정의한 +/++ 내용에 따라 최소한 QM단계로 낮춰야 한다. 그에 따라 안전 목표를 수립해야 한다.
하지만, 안전 목표는 추상적으로 작성한다.
안전목표
1번 : 차량은 고속 주행 중 어떠한 환경 조건(예: 빗길)에서도 의도치 않은 횡방향 움직임이 발생하지 않도록 해야 한다.
3번 : 보행자 밀집 구간이나 교차로에서 차량이 의도되지 않은 횡방향 움직임을 절대적으로 방지해야 한다.
4번 : 차량은 고속 주행 중 횡방향 제어를 상실하지 않도록 조향 시스템과 센서의 이중화 또는 진단 기능을 갖추어야 한다.
6번 : 보행자 밀집 지역에서는 조향 기능 상실 시 차량이 즉시 정지하도록 시스템 설계되어야 한다.
