ROS2
1.ROS2 - Behavior Tree
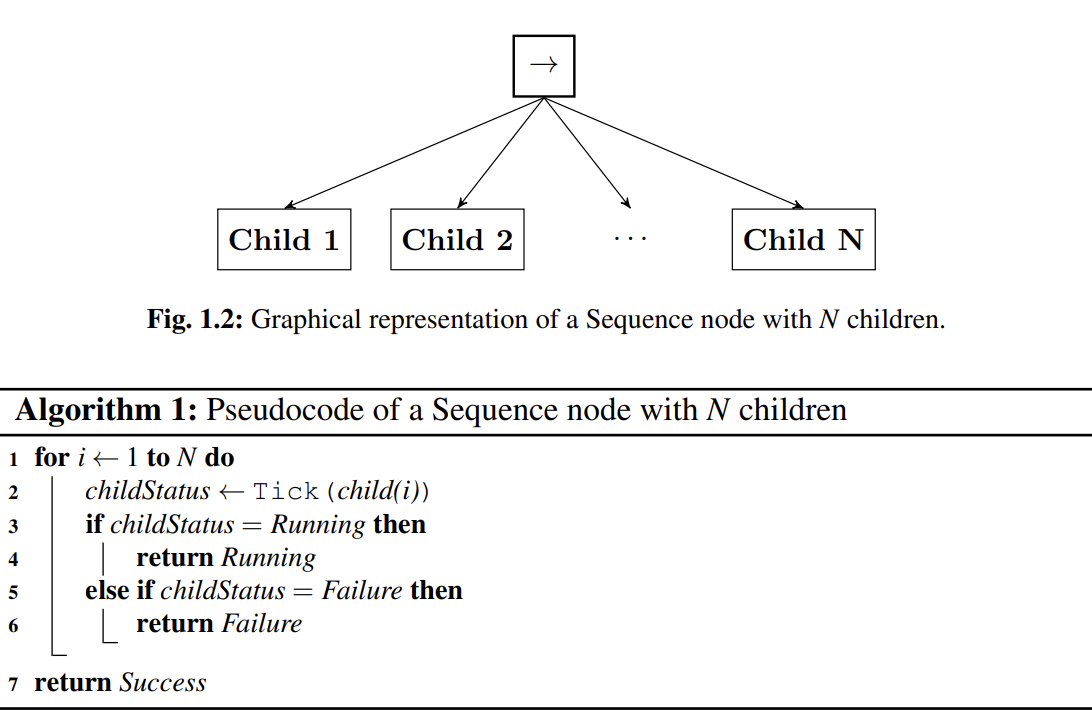
📜 주제 > Behavior Tree에 대해서 알아보자 💡 기존 FSM의 문제 로봇은 주변 상황에 대해 빠르고 효율적으로 인지하고 상태를 바꿔야 한다. 만약 사람이나 장애물이 나타나게된다면 로봇은 방향을 바꾸거나 멈추거나 조치를 취해야 한다. FSM은 태스크 스위
2021년 10월 6일
2.ROS2 - RRT 알고리즘
Rapidly-exploring Random Tree에 대해서 알아보자경로계획(path planning)이란 출발지점에서 도착지까지 갈 수 있는 경로를 찾아야 하는 문제이다. 로보틱스 분야나 자율주행분야가 발달하면서 꾸준히 연구가 이뤄지는 분야로써 다음과 같은 알고리즘
2021년 10월 7일