https://school.programmers.co.kr/learn/courses/30/lessons/81304
📕 문제 설명
방들이 존재하고 이동에 걸리는 시간이 있으며 함정이 존재한다. 주어진 방향으로만 움직일 수 있으며 함정을 밟으면 방향이 반대로 바뀐다. 이때 출발 방부터 도착 방까지 걸리는 최단 시간 구하기
-
Input
방의 개수 n, 출발 방 번호 start, 도착 방 번호 end, 통로 이동시간 정보 roads, 함정 방 번호 traps -
Output
미로 탈출에 필요한 최단 시간
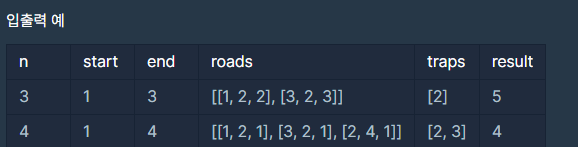
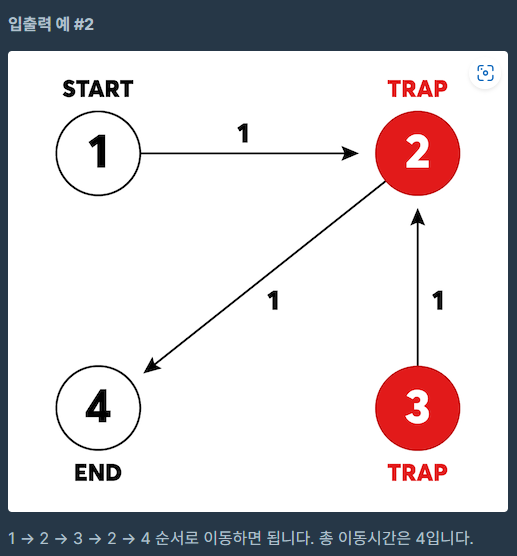
예제
풀이
비트 마스크와 다익스트라를 기반으로 풀었다. 함정 상태를 비트 마스크로 나타내 길을 갈 수 있는 케이스만 우선 순위 큐에 넣어 최단 거리를 뽑는 식으로 진행
1) 방문 여부 확인용 vistied [함정 상태, 노드 번호]
2) 압축된 함정 정보 (노드 index => trap의 index)
- 예를 들어 노드 5, 10이 trap이면 각각 0, 1로 만드는 것
3) graph 초기화 [다음 노드, 비용, 도로 방향 (정방향, 역방향)]
- 초기화 할 때 road 정보를 기반으로 기본 방향은 도로 방향에 0을, 도착 노드와 출발 노드 거꾸로 한 정보는 도로 방향에 1을 넣어 초기화해준다.
4) 최소 힙 (Node => 비용, 현재 노드 번호, 함정 상태)
-
마지막으로 최소 힙에서 나온 현재 노드와 해당 노드의 다음 노드 (그래프 순회)의 상태에 따라 도로를 건널 수 있는 상황인지 판단하고 최소 힙에 다음 정보 넣을 여부 결정
-
현재 노드와 다음 노드의 경우 다음 상태를 가진다.
| 현재 노드 | 다음 노드 |
|---|---|
| 일반 | 일반 |
| 일반 | 함정 |
| 함정 | 일반 |
| 함정 | 함정 |
- 노드의 상태에 따라 도로 방향이 결정된다. 발동된 함정의 개수를 생각하면 되는데 함정이 홀수 횟수로 발동되면 역방향이, 짝수 횟수면 정방향이다. 이를 고려해서 상태에 따라 다음과 같은 경우 도로를 건널 수 없는 케이스가 된다.
1) 두 노드 모두 일반 && 도로 방향 역방향
2) 두 노드 중 하나 함정 && (함정 발동 여부 != 도로 방향)
3) 두 노드 모두 함정 && (함정 발동 개수 % 2 != 도로 방향)
(+ 개수로 판단해도 되고 xor 연산해서 두 함정의 발동 여부가 동일한지를 확인해도 된다.)
위 세 케이스를 제외하고 최소 힙에 넣어가면서 최종 end 노드를 만나게 되면 cost를 반환하면 답이 나오게 된다.
using System;
using System.Collections.Generic;
public class Solution {
public int solution(int n, int start, int end, int[,] roads, int[] traps) {
int answer = 0;
List<(int, int, int)>[] graph = new List<(int, int, int)>[n+1];
for (int i = 1; i <= n; i++)
{
graph[i] = new List<(int, int, int)>();
}
// 그래프 정보 초기화 (다음 노드 번호, 도로 이동 시간, 도로 방향)
for (int i = 0; i < roads.GetLength(0); i++)
{
int departNode = roads[i,0];
int arrivalNode = roads[i,1];
int cost = roads[i,2];
graph[departNode].Add((arrivalNode, cost, 0)); // 0 = 정방향
graph[arrivalNode].Add((departNode, cost, 1)); // 1 = 역방향
}
bool[,] visited = new bool[(1 << traps.Length), n+1]; // 방문 여부 확인용 (trap상태, trap 번호)
Dictionary<int, int> compactedTraps = new Dictionary<int, int>(); // 노드 번호 상관없이 trap기준 index매기는용
for (int i = 0; i < traps.Length; i++)
{
compactedTraps[traps[i]] = i;
}
PriorityQueue pq = new PriorityQueue();
pq.Enqueue(new Node() {cost = 0, index = start, trapState = 0});
while (pq.Count >= 1)
{
Node node = pq.Dequeue();
int currNode = node.index;
int currTrapState = node.trapState;
if (currNode == end) return node.cost;
if (visited[currTrapState, currNode]) continue;
visited[currTrapState, currNode] = true;
foreach(var nextNodes in graph[currNode])
{
int nextNode = nextNodes.Item1;
int nextCost = nextNodes.Item2;
int roadType = nextNodes.Item3;
bool isCurrNodeTrap = compactedTraps.ContainsKey(currNode);
bool isNextNodeTrap = compactedTraps.ContainsKey(nextNode);
// case1) 두 노드 모두 함정이 아닌경우
if (isCurrNodeTrap == false && isNextNodeTrap == false)
{
if (roadType == 1) continue; // 역방향인 경우 길 없음
}
// case2) 두 노드 모두 함정인 경우
else if (isCurrNodeTrap == true && isNextNodeTrap == true)
{
// 각 함정 발동 여부
int isCurrTrapActivated = (currTrapState & (1 << compactedTraps[currNode])) >> (compactedTraps[currNode]);
int isNextTrapActivated = (currTrapState & (1 << compactedTraps[nextNode])) >> (compactedTraps[nextNode]);
// 두 노드 함정 발동 여부 같은 경우 (정방향) (즉, 발동 개수가 짝수개)
// => 두 노드 함정 발동 여부 다른 경우 (역방향) (즉, 발동 개수가 홀수개)
if (((isCurrTrapActivated + isNextTrapActivated) % 2) != roadType) continue;
}
// case 3) 두 노드 중 하나만 함정
else
{
int trapNode = isCurrNodeTrap ? currNode : nextNode;
int isTrapActivated = (currTrapState & (1 << compactedTraps[trapNode])) >> (compactedTraps[trapNode]);
// 함정 발동된 경우 => 역방향, 발동 x => 정방향
if (isTrapActivated != roadType) continue;
}
// 다음 노드 함정이면 state udpate해서 힙에 넣기
int nextState = currTrapState;
if (isNextNodeTrap)
{
nextState = currTrapState ^ (1 << compactedTraps[nextNode]);
}
pq.Enqueue(new Node {cost = node.cost + nextCost, index = nextNode, trapState = nextState});
}
}
return answer;
}
}
public struct Node
{
public int cost;
public int index;
public int trapState;
}
public class PriorityQueue
{
List<Node> heap = new List<Node>();
public int Count => heap.Count;
public void Enqueue(Node data)
{
heap.Add(data);
int now = heap.Count - 1; // 추가한 노드 위치 (트리 마지막 레벨 왼쪽)
while (now > 0) // 순서 지정하기
{
int next = (now - 1) / 2; // 부모 노드 (트리)
if (heap[now].cost > heap[next].cost) break;
// 부모노드보다 추가한게 작으면 Swap
Node temp = heap[now];
heap[now] = heap[next];
heap[next] = temp;
now = next;
}
}
public Node Dequeue()
{
Node ret = heap[0]; // return할 값 (트리 root에 max 저장해둔 형태)
int lastIndex = heap.Count - 1;
heap[0] = heap[lastIndex];
heap.RemoveAt(lastIndex);
lastIndex -= 1;
int now = 0;
while (true)
{
int left = 2 * now + 1;
int right = 2 * now + 2;
int next = now;
if (left <= lastIndex && heap[next].cost > heap[left].cost) next = left; // 왼쪽보다 크면 왼쪽으로 보내기
if (right <= lastIndex && heap[next].cost > heap[right].cost) next = right; // 오른쪽보다 크면 오른쪽으로 보내기 (여기서는 위에 now랑 left랑 비교해서 더 큰애랑 또 비교해서 갱신하게됨)
if (next == now) break;
Node temp = heap[now];
heap[now] = heap[next];
heap[next] = temp;
now = next;
}
return ret;
}
}결과