[14주차]
TIL
Triangulation
-
삼각측량의 목적
-
General Triangulation
-
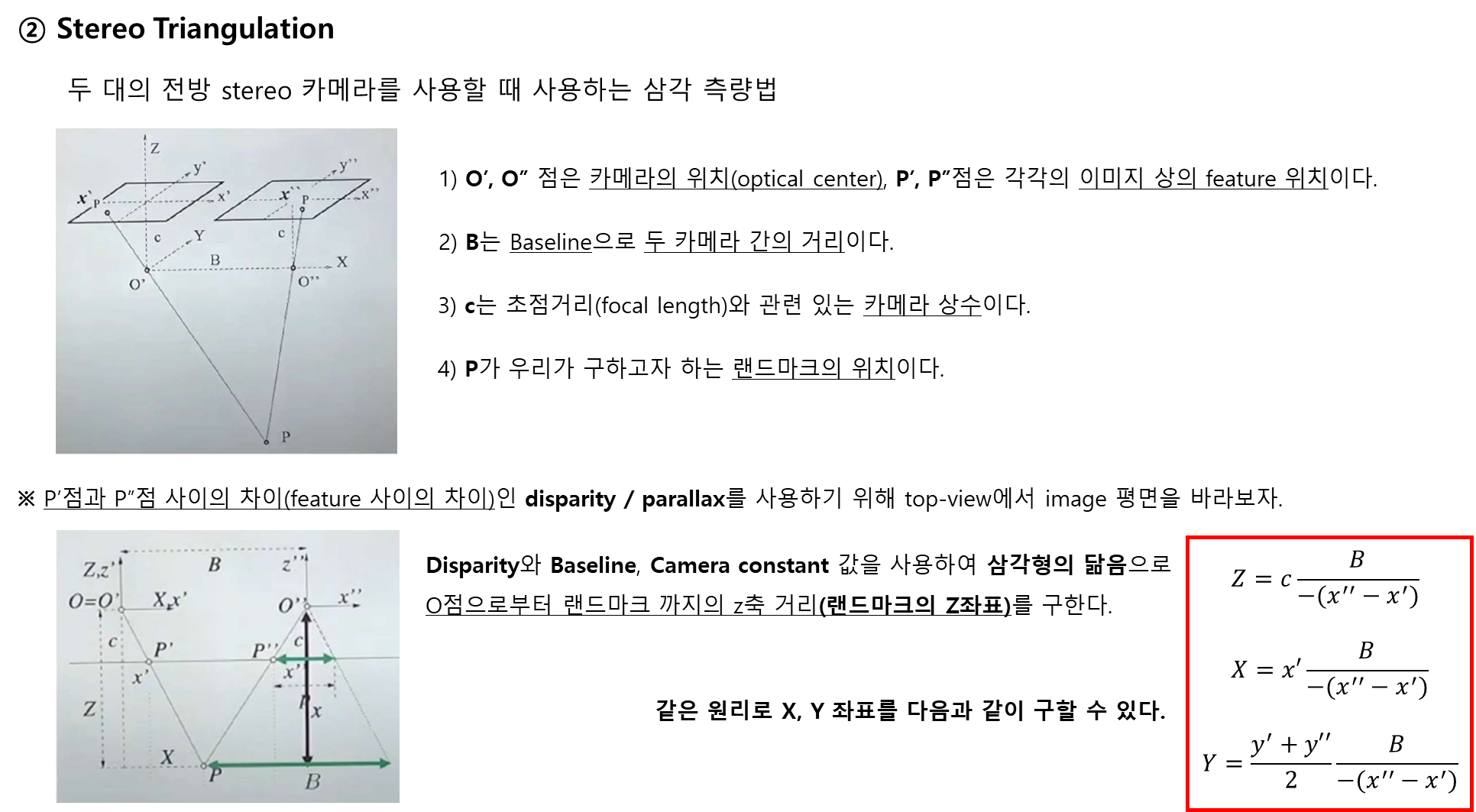
Stereo Triangulation
-
Linear / Non-Linear approximation method
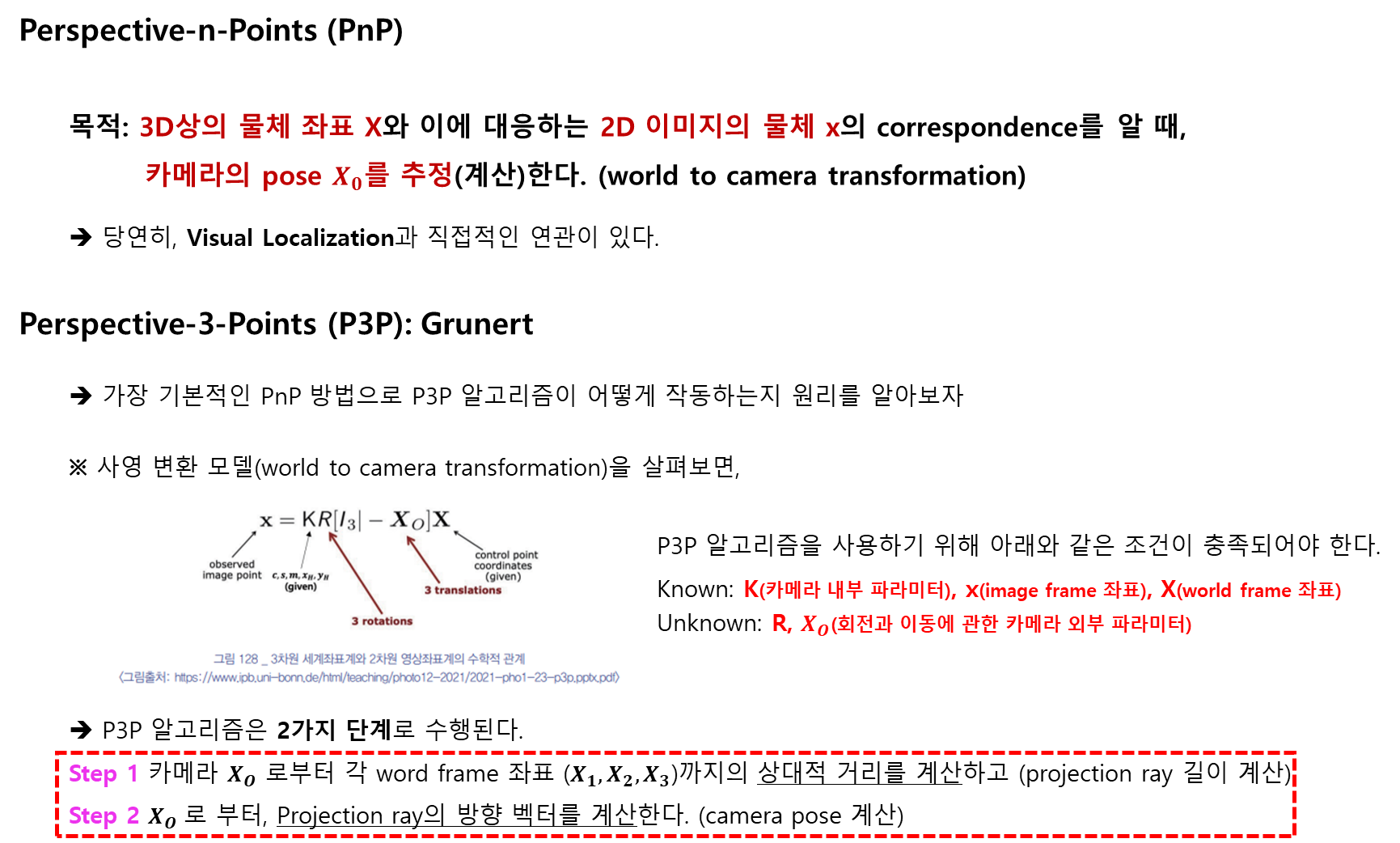
Perspective-n-Points
-
PnP 알고리즘의 목적
-
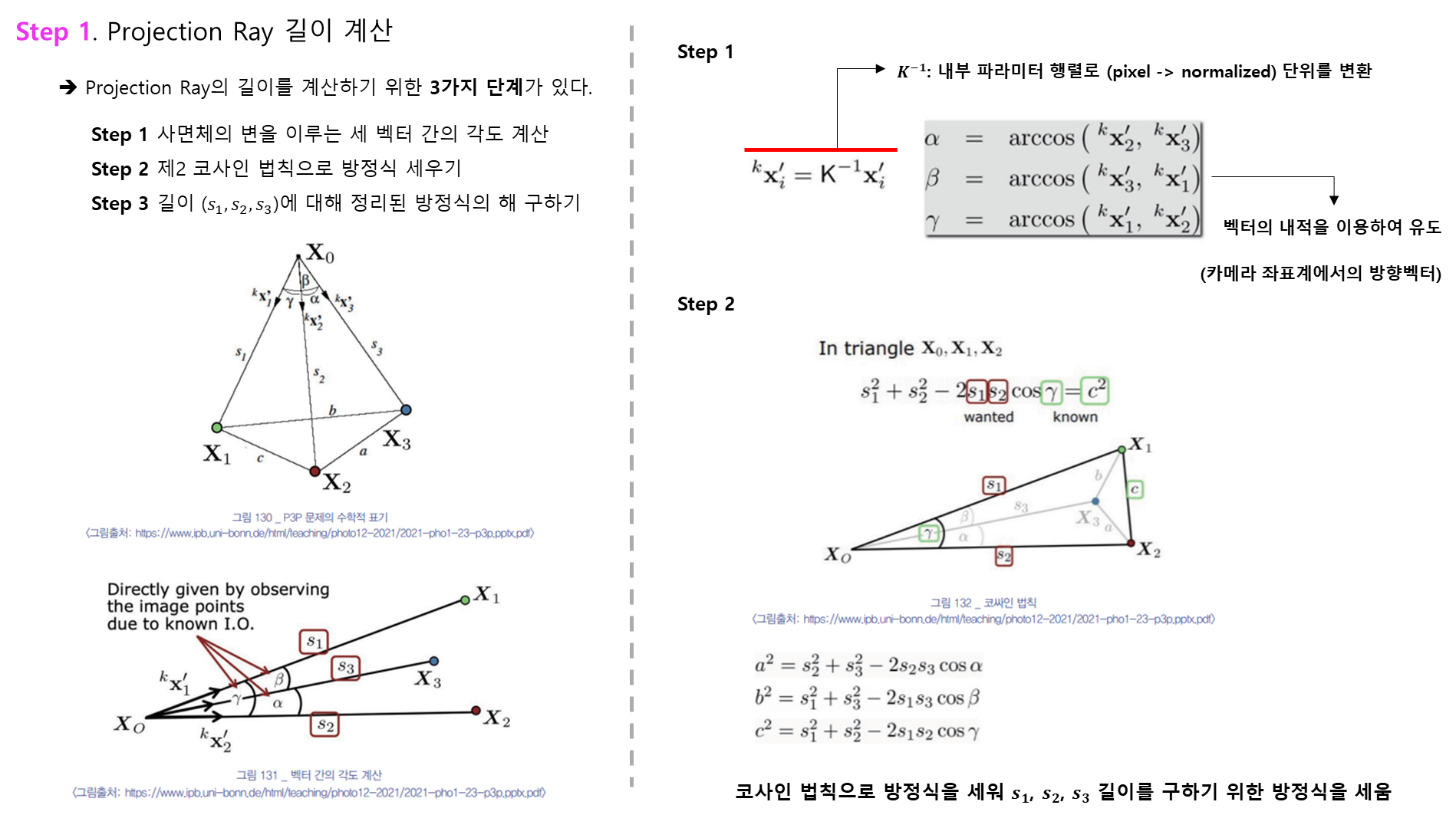
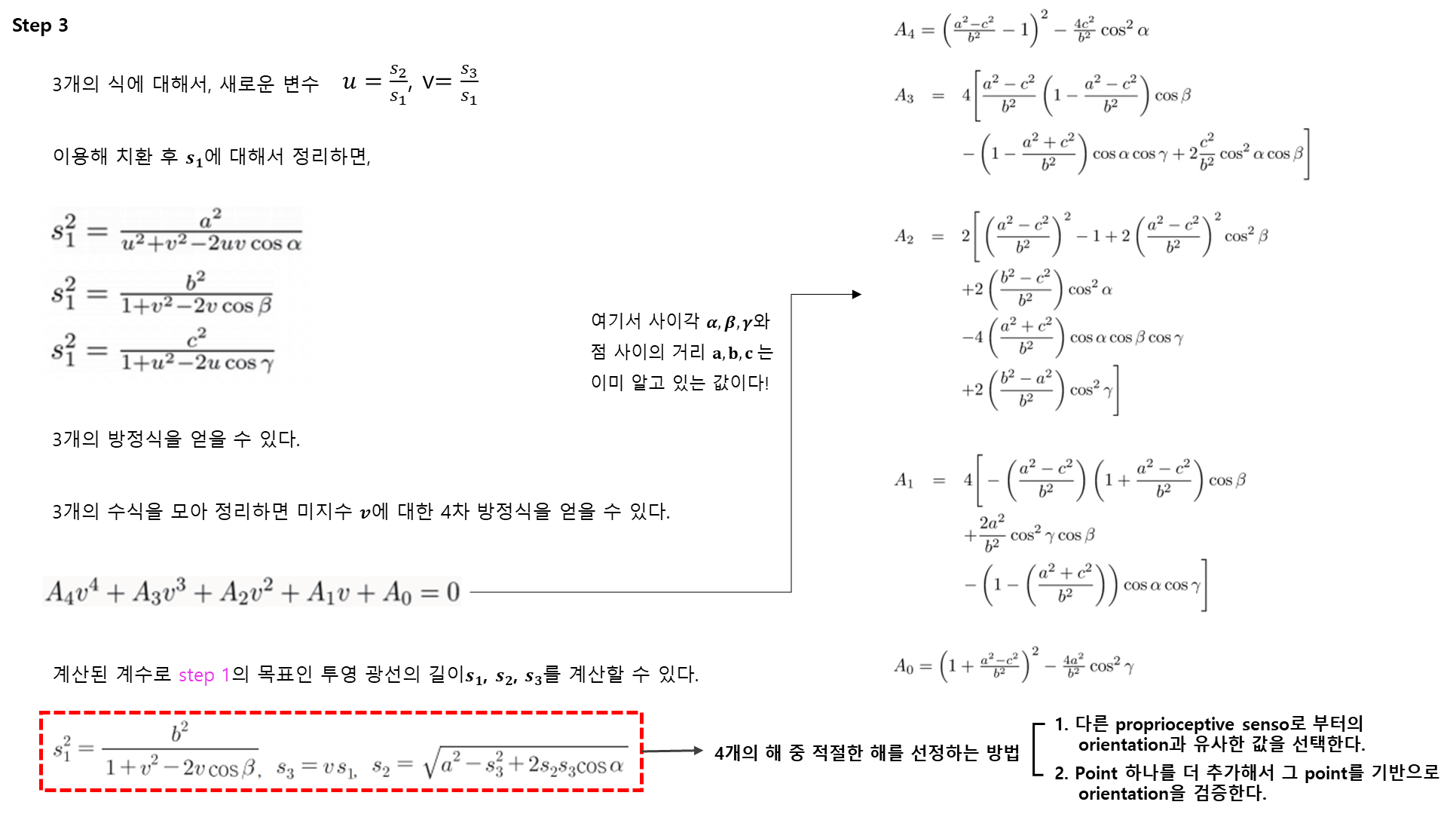
P3P Grunert를 통한 작동 방법의 이해
State Estimation
-
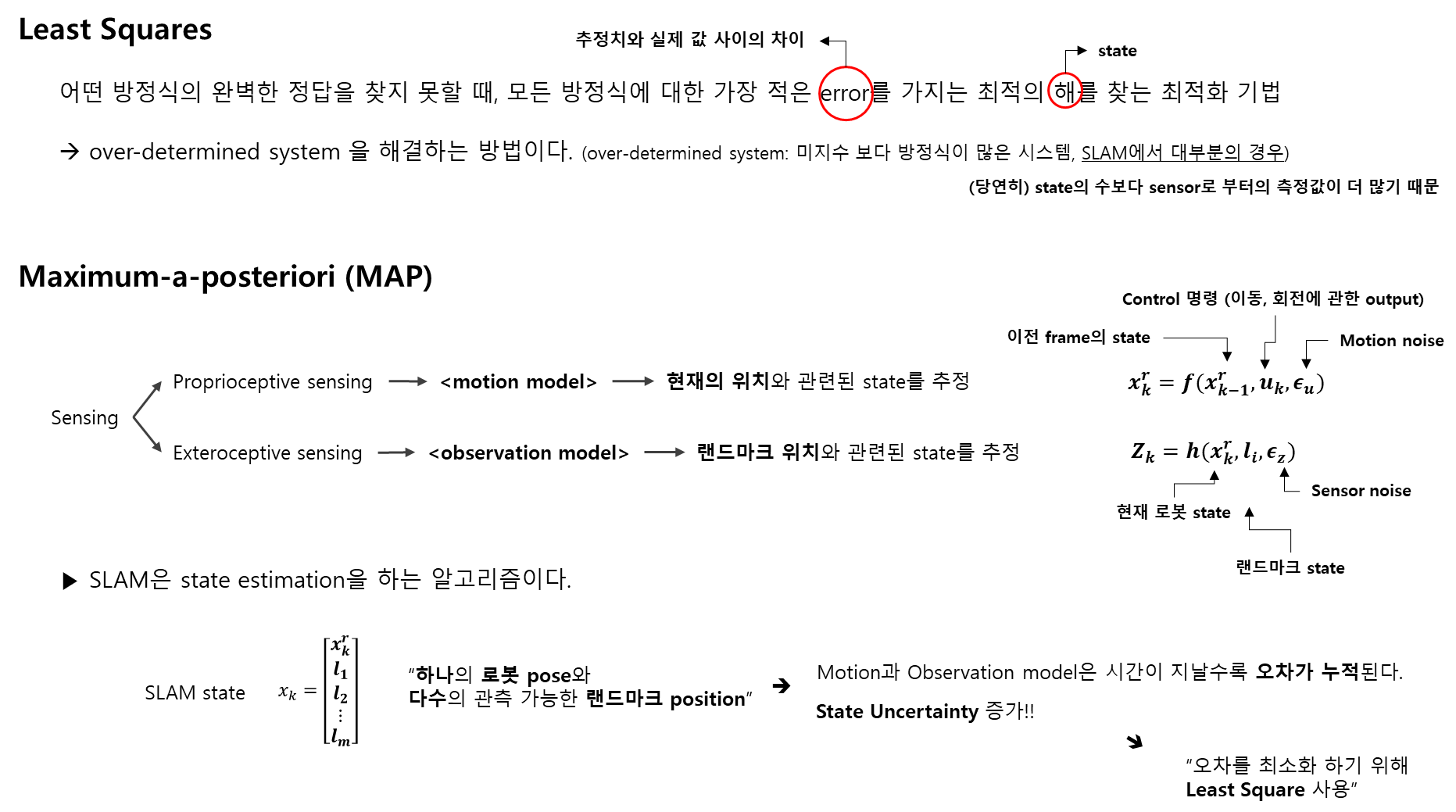
Least Squares
-
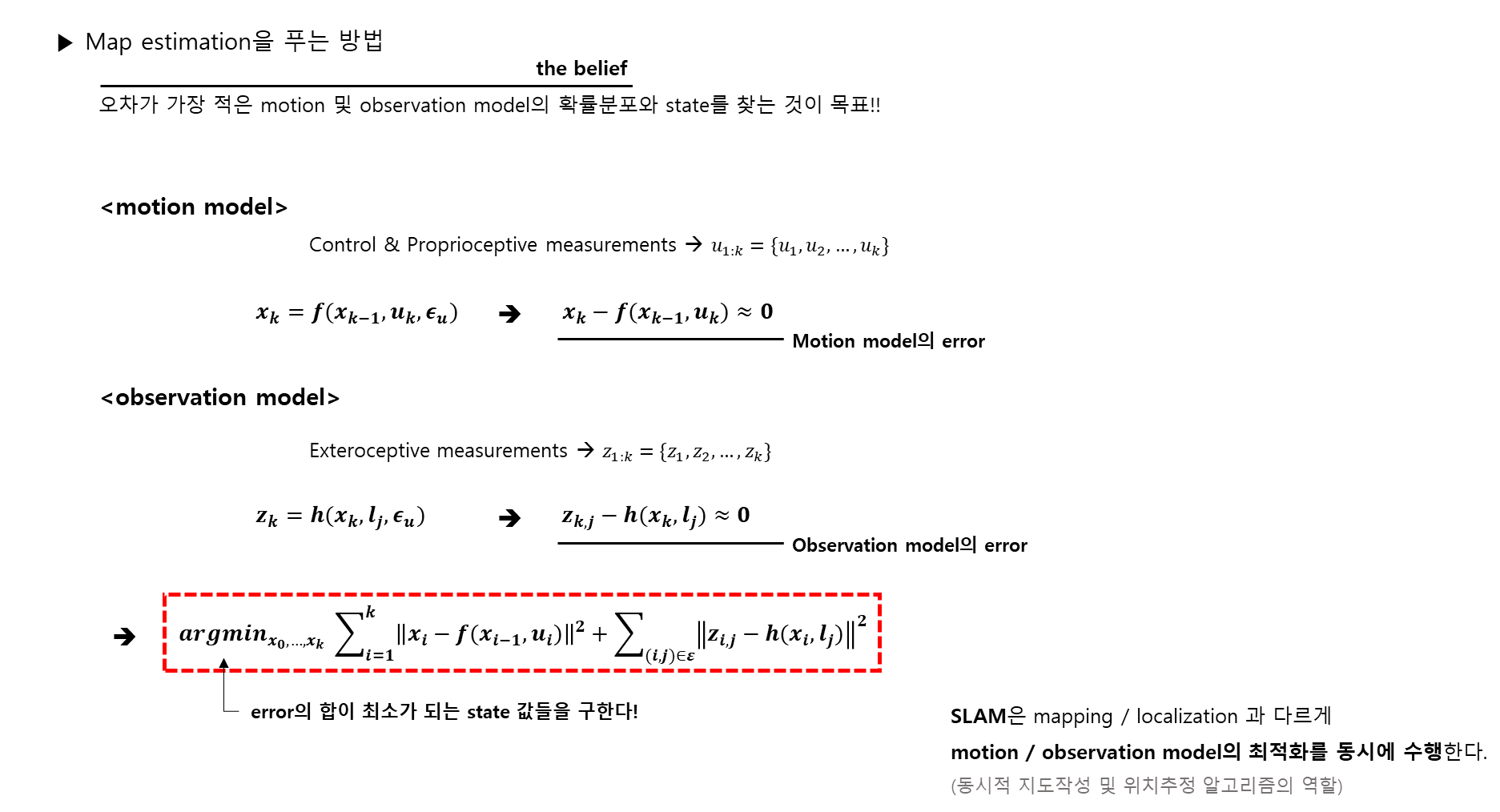
Maximum-a-Posteriori (MAP)
Graph-based SLAM
14주차 skill set
1) 2D 이미지로부터 3D Mapping을 위한 삼각측량법의 원리를 이해한다.
2) Visual Localization을 위한 P3P 알고리즘의 작동 방법을 이해한다.
3)
학습내용
[1] Triangulation
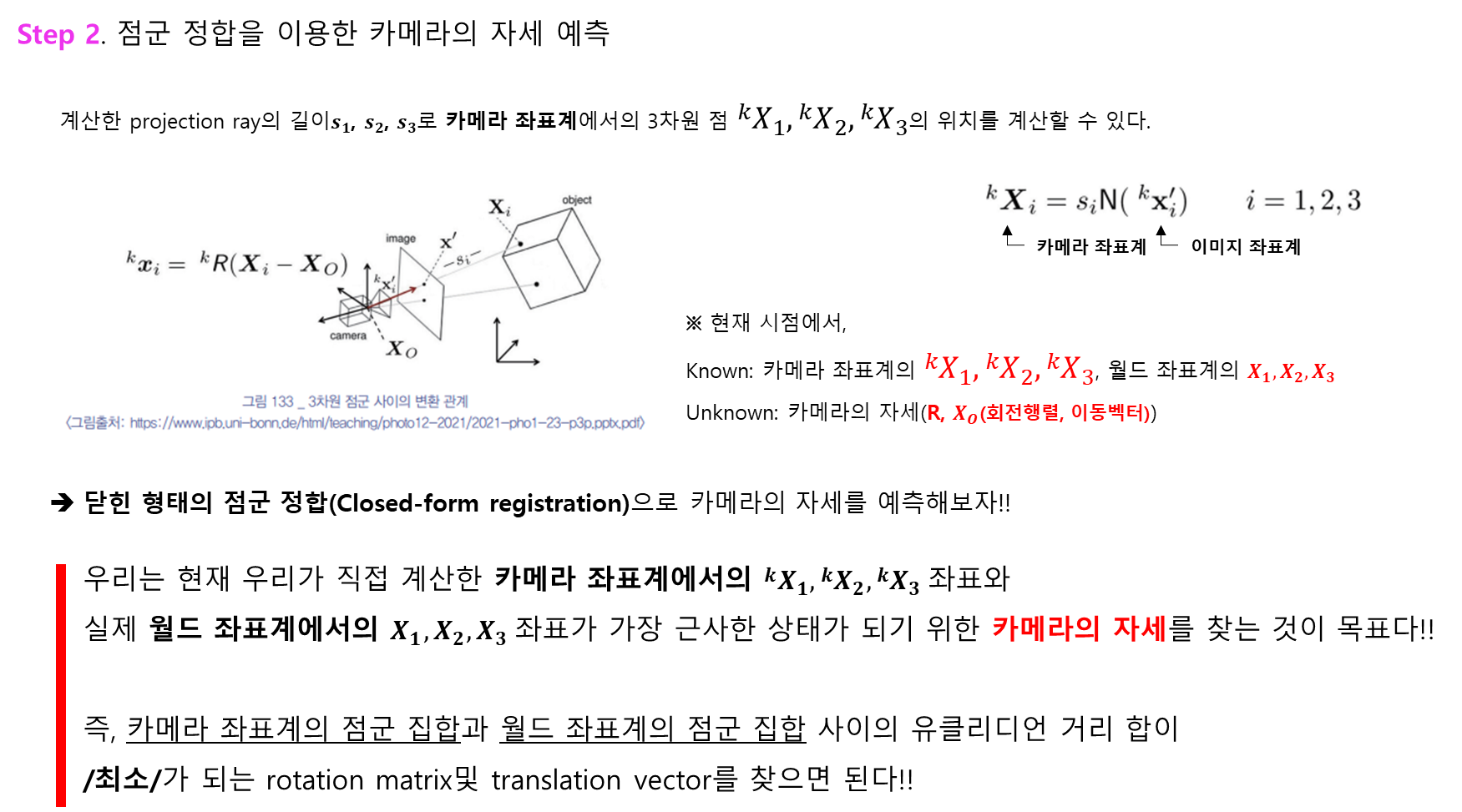
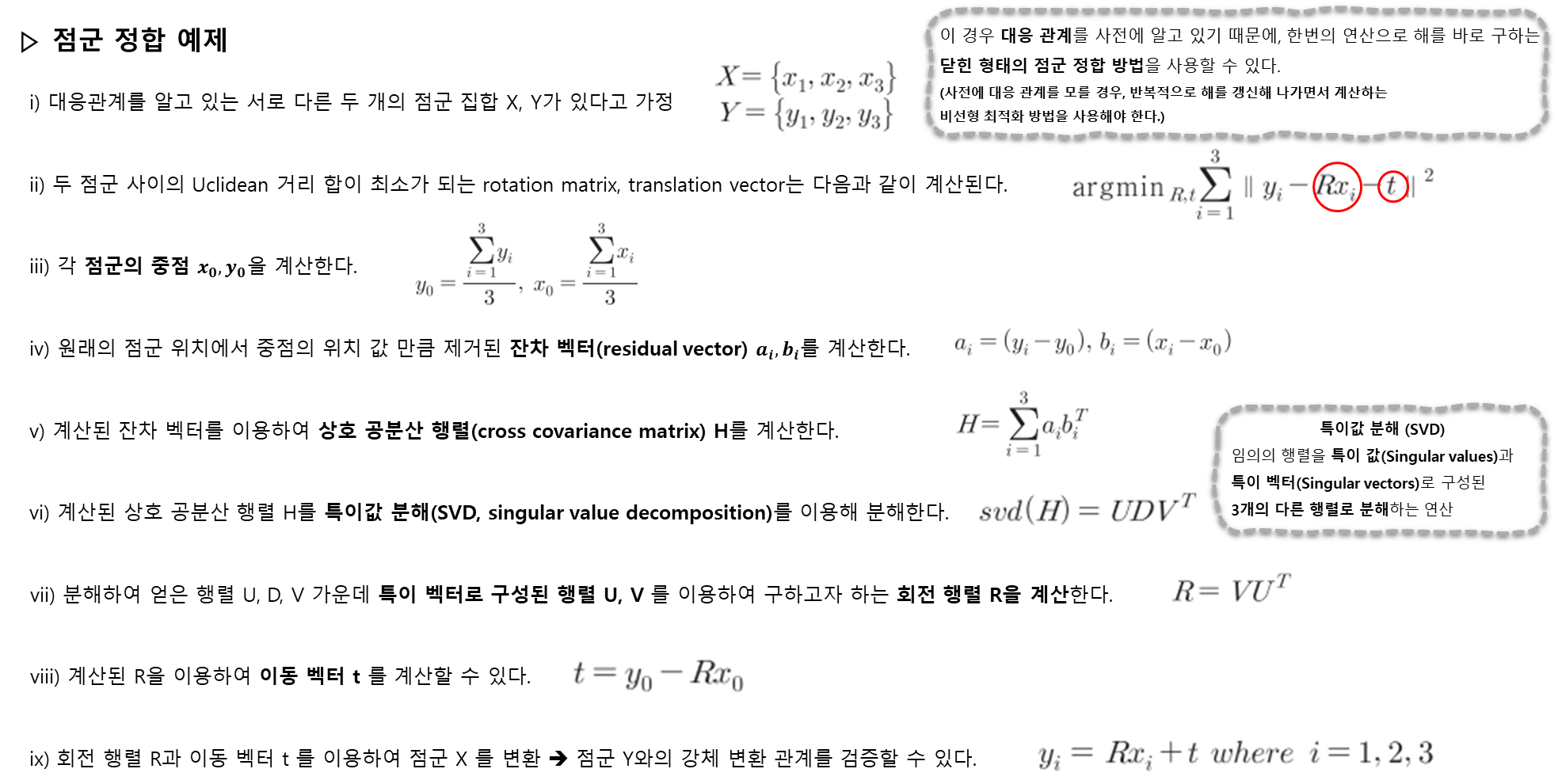
1. 삼각측량법 (Triangulation)
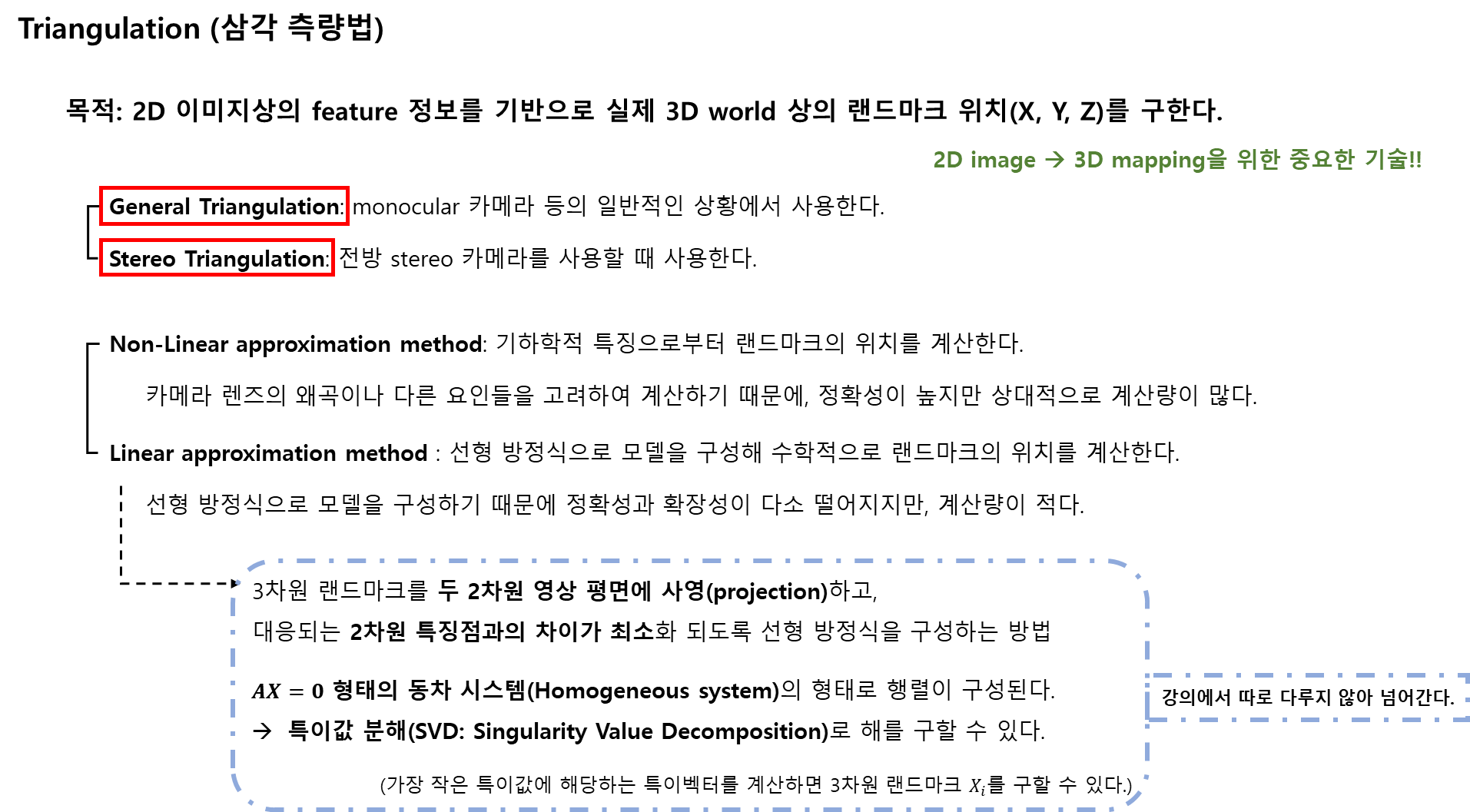
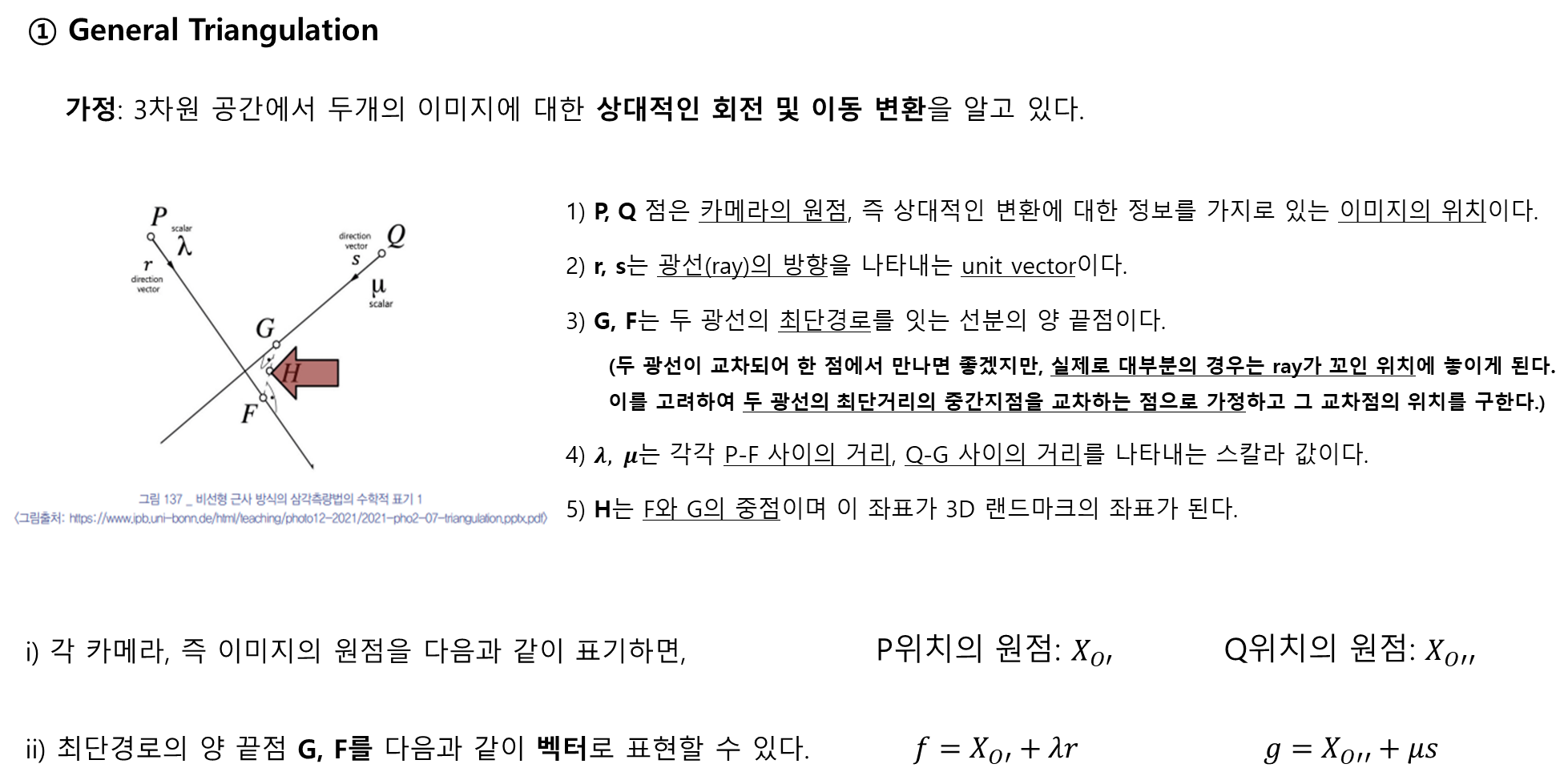
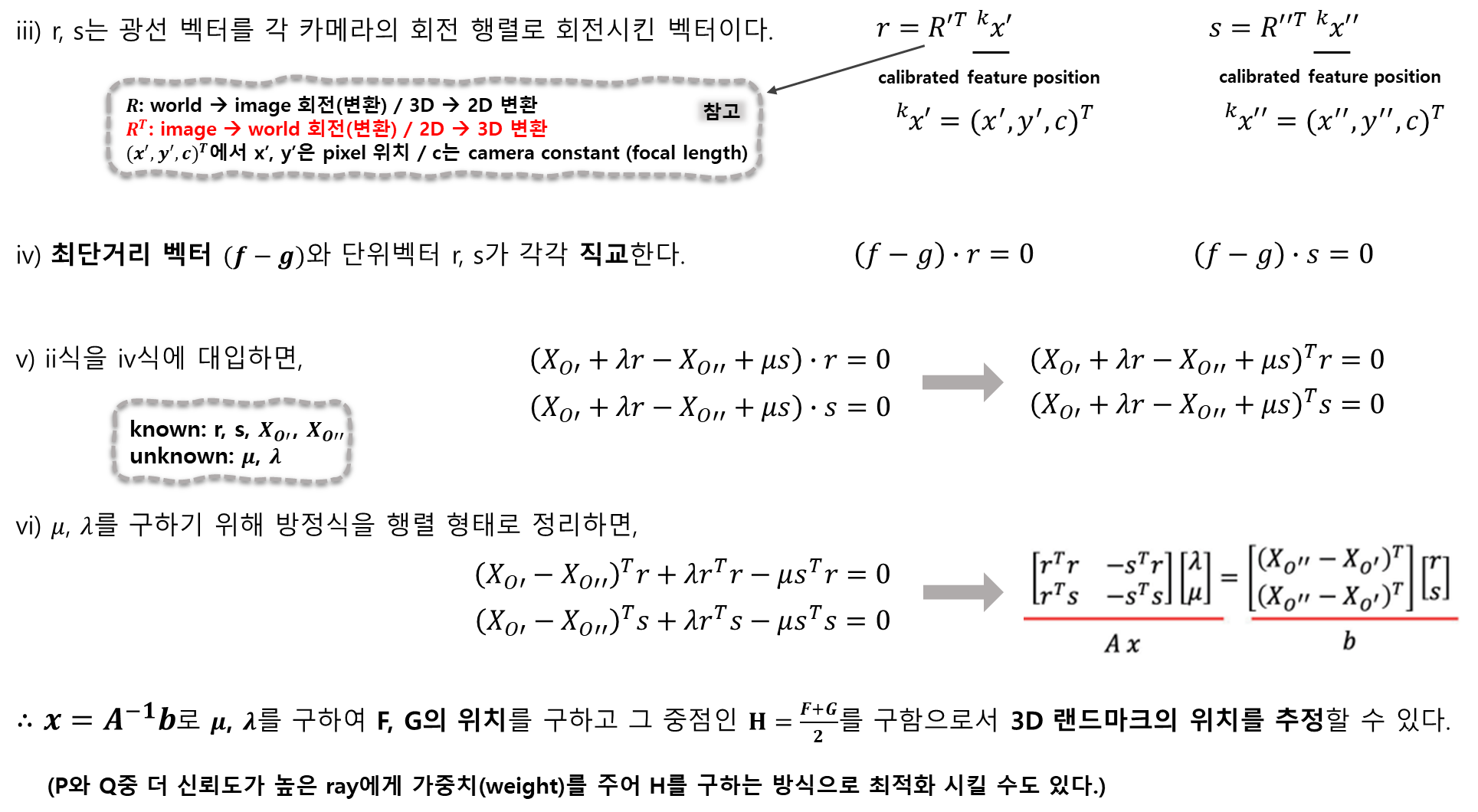
2. General Triangulation
3. Stereo Triangulation
[2] Perspective-n-Points (PnP)
[3] State Estimation
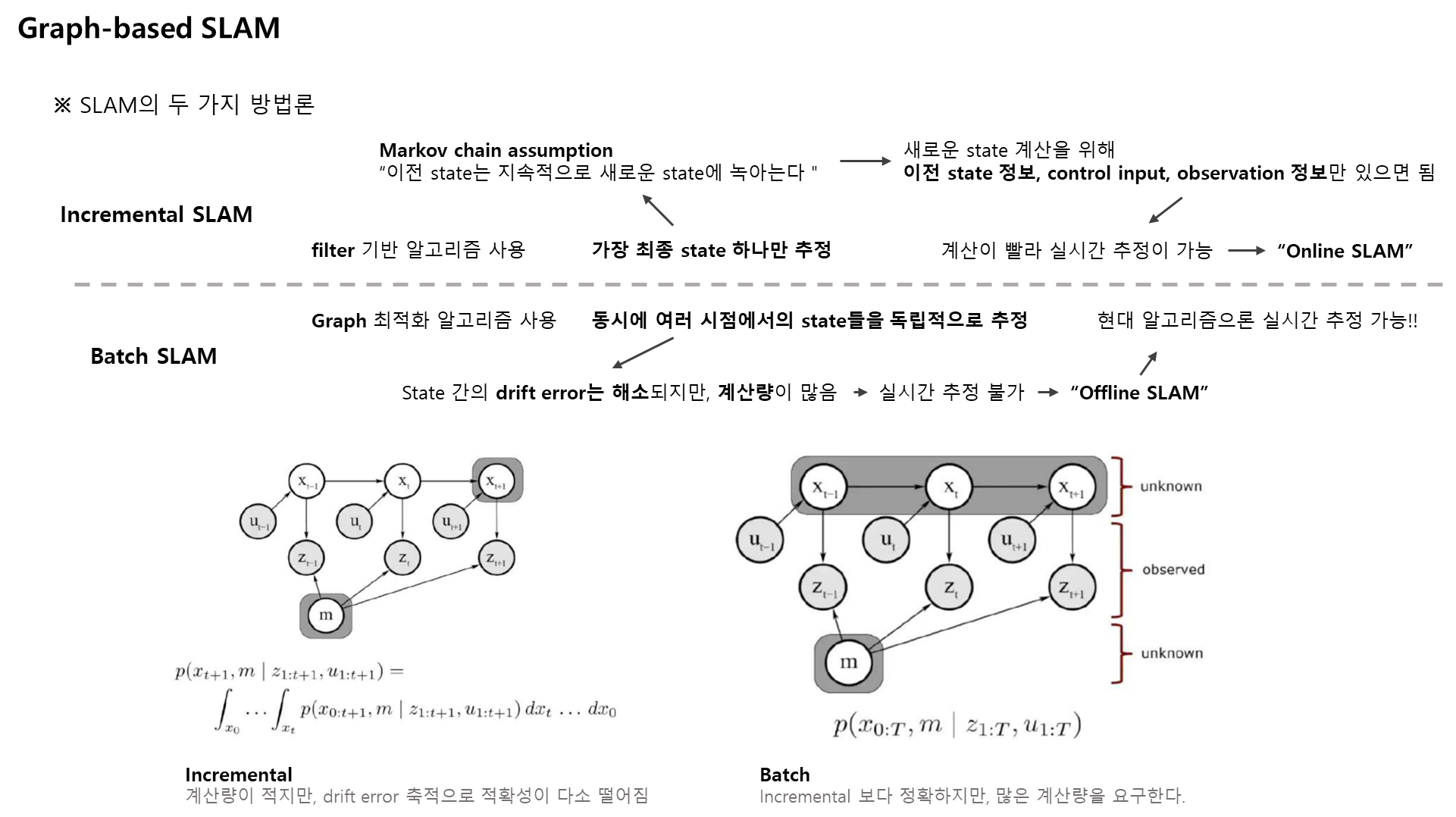
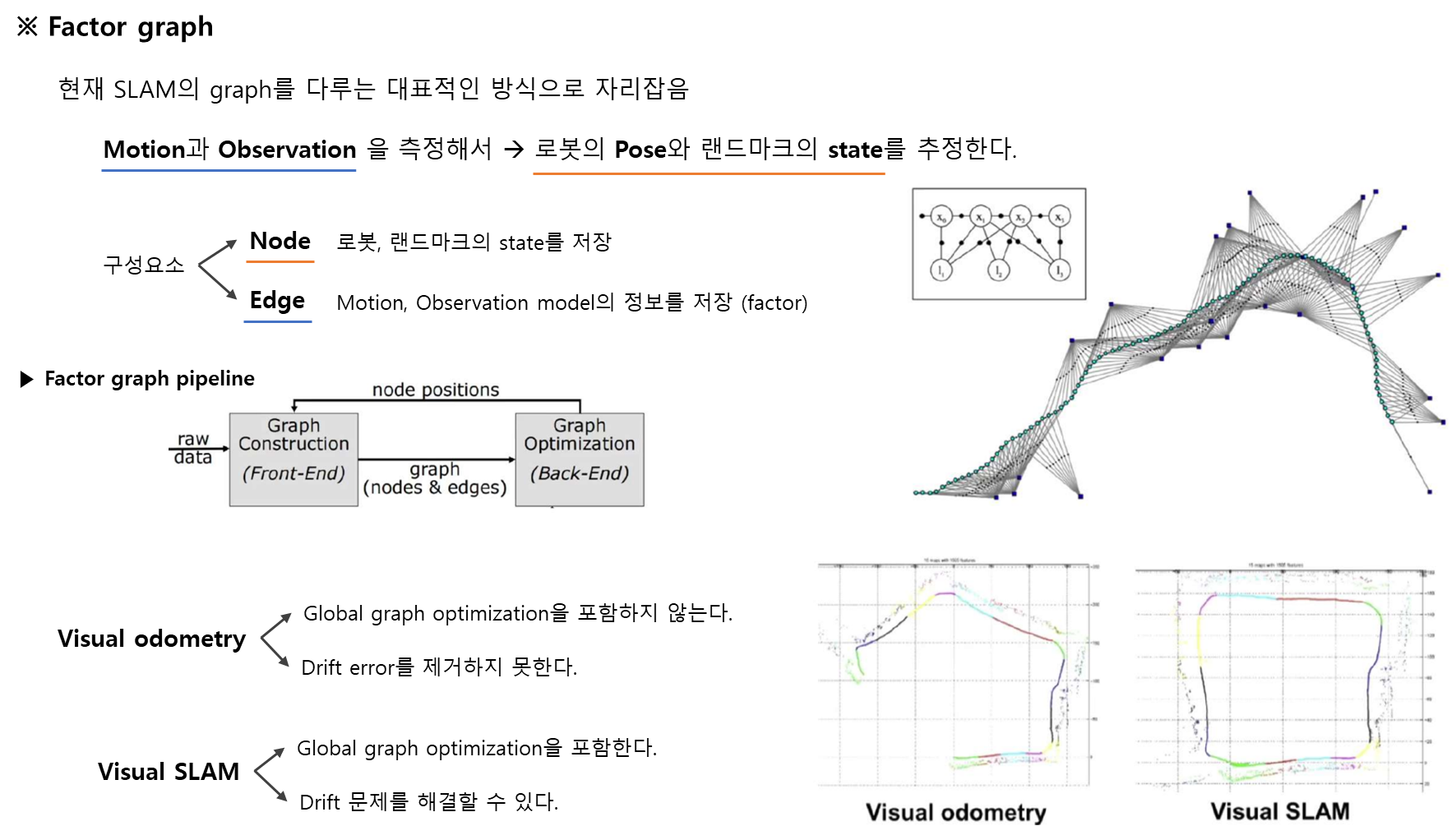
[4] Graph-based SLAM
<출처>
(1) Programmers K-Digital-Training: 자율주행 데브코스 Planning & Control, SLAM
(2) ALIDA 님 tistory 블로그 https://alida.tistory.com/9
(3) SLAM의 이해와 구현-배포용.pdf (신동원, 장형기)
(4) https://jebae.github.io/rodrigues-rotation

자율주행 TIL(Today I Learned) 기록