[4주차]
TIL
고전제어 강의 소개
-
자율주행 시스템 아키텍처
-
상태공간 방정식
신호처리: Filter
-
Average filter
-
Moving average filter
-
Low pass filter
-
State observers
-
Kalman filter
PID 제어
4주차 skill set
1) Modeling 2) Filter 3) PID control
학습내용
[1] 고전제어 강의 소개 (Intro.)
1. 자율주행 시스템 아키텍처
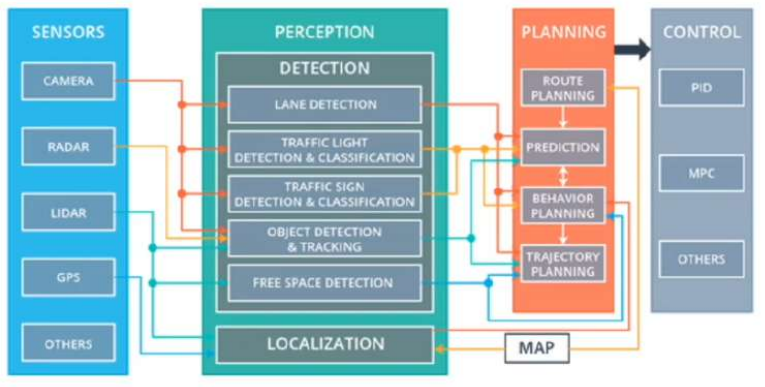
- 자율주행 시스템 순서
Input dst
--> Rout planning
--> Perception (Sensor -> Localization&Map + Detection)
--> Planning (Prediction -> Behavior Planning -> Trajectory Planning)
--> Control
2. 학습목표
-
이번 Planning & Control 강의에서는
prediction -> trajectory -> control에 중점을 두고 공부한다. -
학습 순서:
제어하는 법 (control) -> 경로계획 방법 (trajectory) -> 주변 사물의 거동예측을 통한 판단 (prediction) -
항상 이번 학습을 통해 얻을
skill set이 무엇인지 생각하고 정리하자.
[2] 상태공간 방정식 (State-space equation)
1. Coordinate system
- World coordinate
- Vehicle coordinate
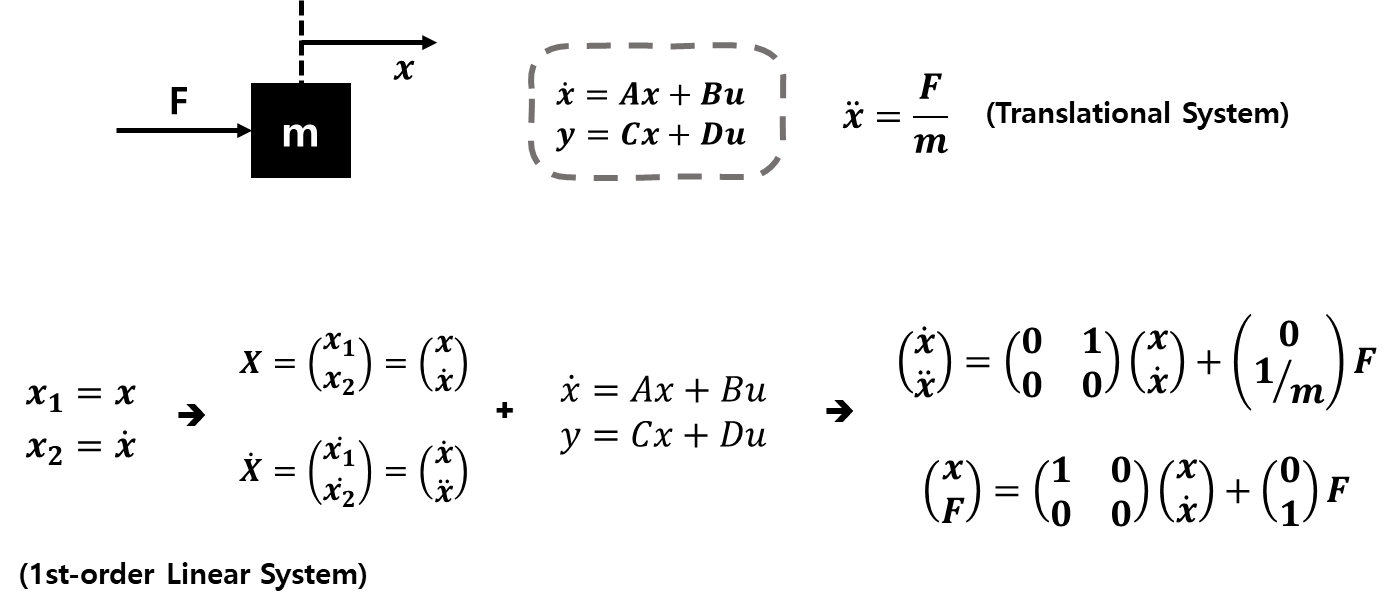
2. Modeling
- Translational system: ΣF=Ma
- Rotational system: ΣT=Iα
- D'Alembert's principle
3. State-space equation
- State variable: 시스템의 거동을 결정하는 최소 개수의 변수
- State vector: 상태 변수들의 집합 (n개의 변수)
- State space: 상태 벡터들의 집합 (n차원 공간)
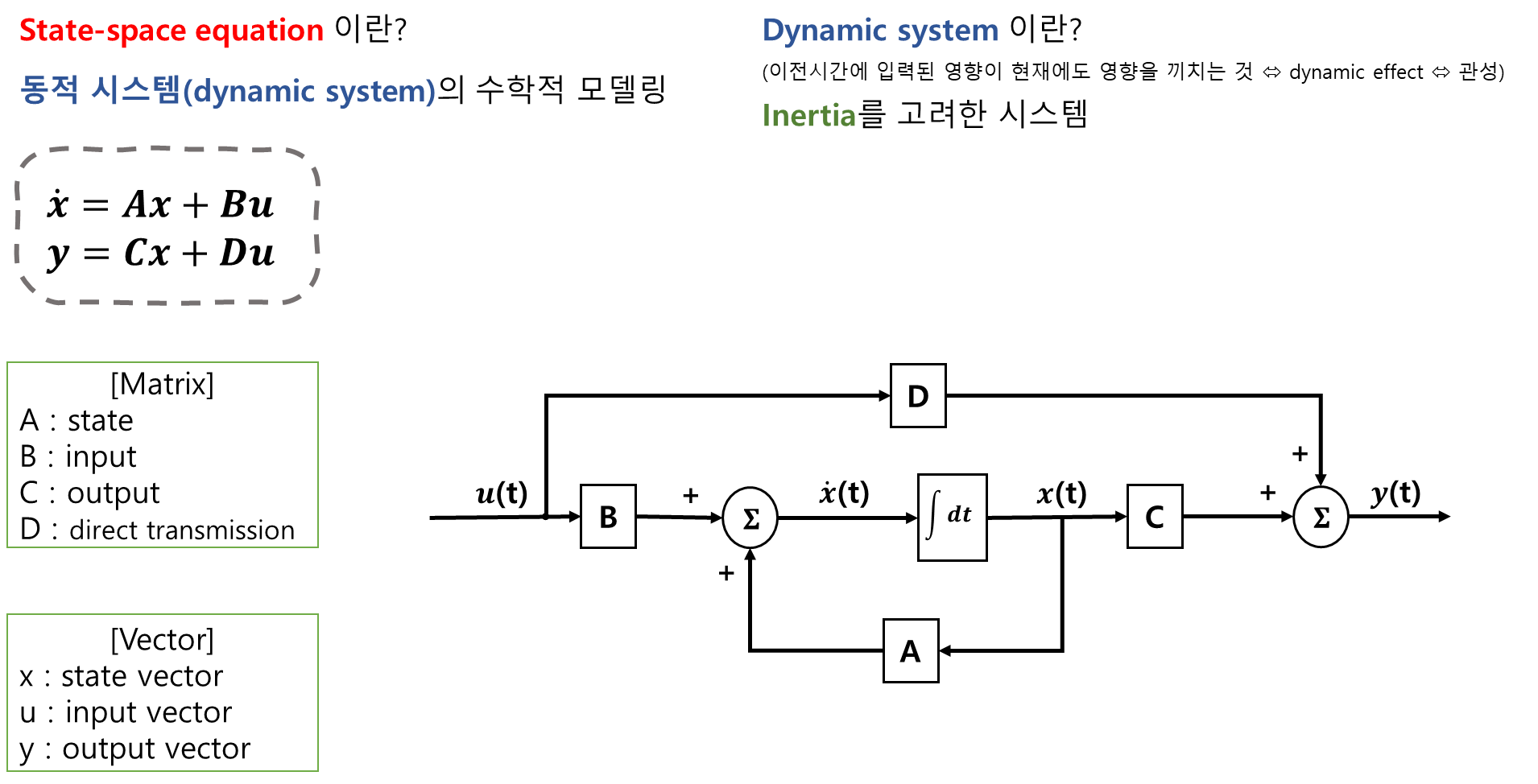
-
동적 시스템의 상태, 입/출력을 벡터 형태로 표현하고, 시스템의 동작을 시간에 대한 함수로 모델링한다.
-
상태공간이 필요한 이유: 동적 시스템을 효율적인 선형 방정식으로 다룰 수 있다.
-
간단한 예시
[3] 신호처리: Filter
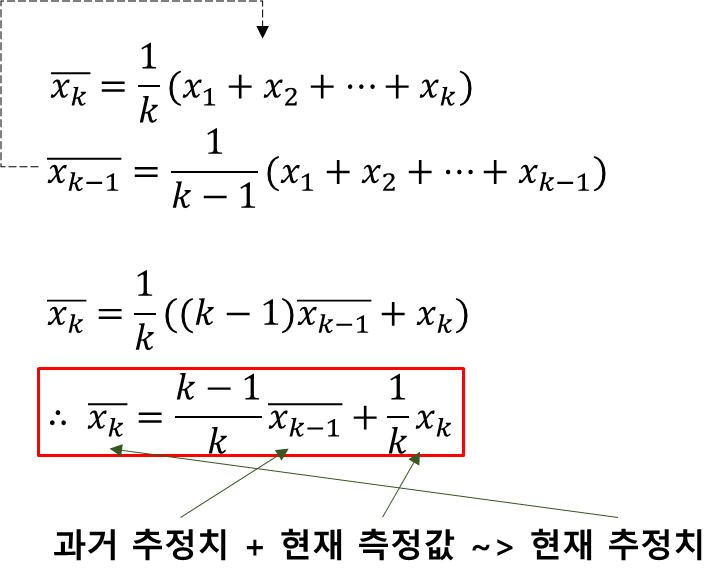
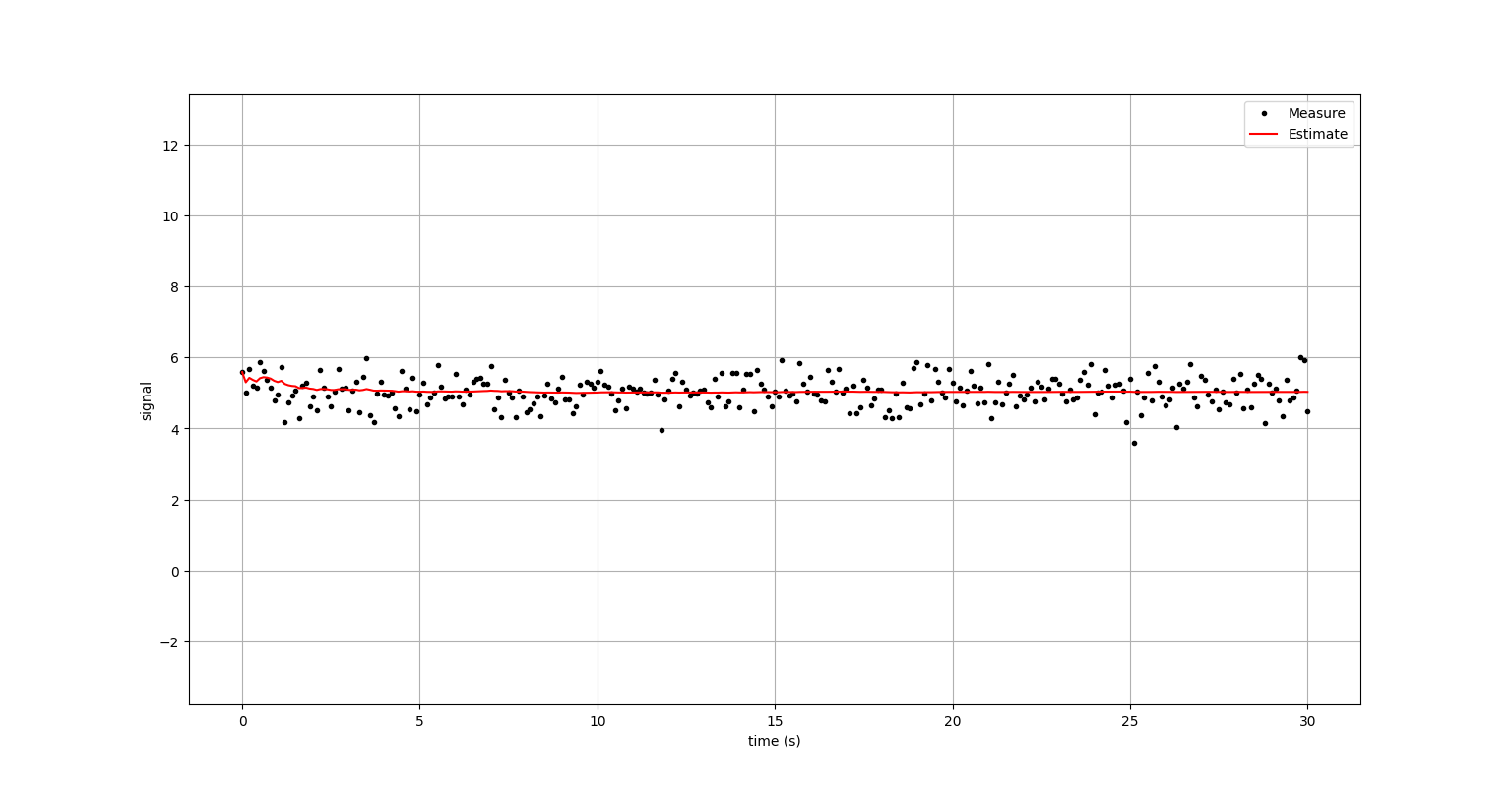
1. Average Filter (평균필터)
-
가장 간단한 형태의 재귀(Recursive)필터
- 재귀필터: 과거 추정치와 측정값으로 현재 추정치를 계산
-
측정된 모든 데이터의 평균을 추정값으로 사용한다.
- 단점: 과거 데이터가 많아질수록 최근 데이터의 양상이 반영되기 힘들다.
- Ex01) AverageFilter.py
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# 필터 클래스 생성
class AverageFilter:
# 클래스 초기화
def __init__(self, y_initial_measure):
# 추정치 초기값 = 측정치 초기값
self.y_estimate = y_initial_measure
# 계산할 측정값의 개수
self.k = 1
# *** 실제 평균필터 방정식을 적용시키는 함수 ***
def estimate(self, y_measure):
# 측정치 (csv 파일에서 받아올 값)
self.y_measure = y_measure
# Q)메서드 내에서 계산할 때 멤버 앞에는 무조건 self. 를 붙여야 하는건가...?
# A)self. 는 인스턴스를 나타내는 것이다. 메서드 내에서 self.를 사용해야 인스턴스 변수에 접근할 수 있기 때문에 꼭 써야한다.
self.y_estimate = (self.k-1) * self.y_estimate / self.k + self.y_measure / self.k
self.k += 1
# if __name__ == "__main__": 이게 스크립트 파일을 구분하기 위한 표시라고 한다.
# 현재 모듈에서 직접 실행 시켜야만 작동하는 블록(?)이다. 다른 모듈에서 import 해서 사용할 때 작동하지 않는 부분이다.
if __name__ == "__main__":
# pandas 라이브러리의 scv를 읽는 함수를 사용하여 signal에 2차원 dataFrame 형식으로 데이터를 저장한다. (Matrix)
signal = pd.read_csv("Data/example_Filter_1.csv")
# 실행 전에 y_estimate 열의 성분들을 0으로 초기화 시켜주는 작업이다. (없어도 되는데 공부삼아 넣었다.)
signal['y_estimate'] = np.zeros(len(signal))
# y_estimate이라는 인스턴스 생성 (초기 x0 저장됨)
y_estimate = AverageFilter(signal.y_measure[0])
# 행, 열 수 만큼 반복 (y_estimate의 계산값을 update한다.)
for i, row in signal.iterrows():
# MovingAverageFilter 클래스의 estimate 메소드를 사용하여 signal의 y_measure행 i열의 값으로 y_estimate를 계산한다.
y_estimate.estimate(signal.y_measure[i])
# 위에서 계산된 y_estimate를 새로운 행 i에 update 한다.
signal.y_estimate[i] = y_estimate.y_estimate
# 모두 계산 된 siganal의 dataFrame을 한번 살펴본다.
print(signal)
# MatLAB Plot과 매우 유사하다. (아마 거기서 가져온 거 아닐까 하는 생각..?)
# figure 제목
plt.figure('ex01_AverageFilter')
# 플롯팅 할 (x좌표, y좌표, 선종류, 데이터 명)을 입력한다.
plt.plot(signal.time, signal.y_measure,'k.',label = "Measure")
plt.plot(signal.time, signal.y_estimate,'r-',label = "Estimate")
# x, y 좌표계 이름을 설정한다.
plt.xlabel('time (s)')
plt.ylabel('signal')
# legend(범례)가 그래프 상 최적의 위치에 배치되도록 자동으로 설정하라는 의미이다.
plt.legend(loc="best")
# x, y축의 크기를 동일하게 설정하라는 의미이다.
plt.axis("equal")
# grid on
plt.grid(True)
plt.show()
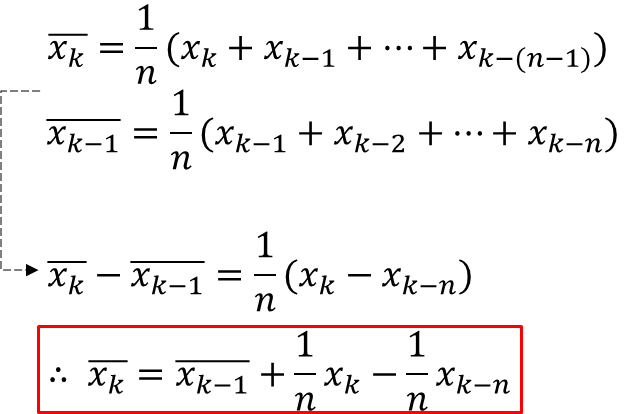
2. Moving Average Filter (이동평균필터)
-
평균필터의 단점을 보완하고자, 시스템의 동적인 변화를 반영한 필터
-
평균을 계산할 데이터의 구간을 정해서 과거 데이터를 어느정도 무시
- 단점: 여전히 '평균'이므로 모든 데이터의 가중치가 동일하다는 한계가 있다.
- Ex02) MovingAverageFilter.py
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# Buffer열할을 할 큐(queue)를 만들기 위해 가져온 라이브러리이다.
import queue
# 이동평균필터 클래스
class MovingAverageFilter:
# 클래스를 초기화 해주는데, 평균계산할 데이터의 개수 n을 여기서 바로 지정한다.
def __init__(self, y_initial_measure, n=10):
# y_Buffer라는 이름의 queue를 만들었다. (FIFO 방식으로 데이터를 저장한다!!!)
# FIFO 방식의 데이터 처리를 도와주는 queue는 나중에 오래된 센서 데이터를 처리할 때 사용될 수 있을 것 같다.
self.y_Buffer = queue.Queue()
# Buffer 초기화 작업 (n개의 데이터를 저장하는 buffer의 모든 데이터를 초기 측정값으로 채움, 필터링 전 일종의 보정을 하는 것)
for _ in range(n):
self.y_Buffer.put(y_initial_measure)
# 마찬가지로 인스턴스 변수에 접근하기 위해 self. 를 붙여 멤버를 선언해 준다.
self.n = n
self.y_estimate = y_initial_measure
# y_estimate를 구하는 실제 이동평균필터 방정식을 적용시키는 함수
def estimate(self, y_measure):
# 인스턴스 접근을 위한 멤버 선언
self.y_measure = y_measure
# 해당 시점의 Buffer에 가장 먼저 추가되었던 y_measure 값을 제거함과 동시에 반환하여 y_previous_measure에 할당한다.
self.y_previous_measure = self.y_Buffer.get()
# FIFO 방식의 데이터 처리로 인해 한 자리가 남는다. 그 자리에 새로운 y_measure 값을 넣어준다.
self.y_Buffer.put(y_measure)
# *** 고로 여기서 y_previous_measure는 buffer에서 가장 최근에 떨어져 나온, x_(k-u)에 해당하는 측정치이다. ***
self.y_estimate = self.y_estimate + (self.y_measure - self.y_previous_measure) / self.n
# 결국 이 메소드의 목적은 추정치 self.y_estimate를 계산하는 것이다.
return self.y_estimate
if __name__ == "__main__":
signal = pd.read_csv("Data/example_Filter_2.csv")
signal['y_estimate'] = np.zeros(len(signal))
y_estimate = MovingAverageFilter(signal.y_measure[0])
for i, row in signal.iterrows():
y_estimate.estimate(signal.y_measure[i])
signal.y_estimate[i] = y_estimate.y_estimate
print(signal)
plt.figure('ex02_MovingAverageFilter')
plt.plot(signal.time, signal.y_measure,'k.',label = "Measure")
plt.plot(signal.time, signal.y_estimate,'r-',label = "Estimate")
plt.xlabel('time (s)')
plt.ylabel('signal')
plt.legend(loc="best")
plt.axis("equal")
plt.grid(True)
plt.show()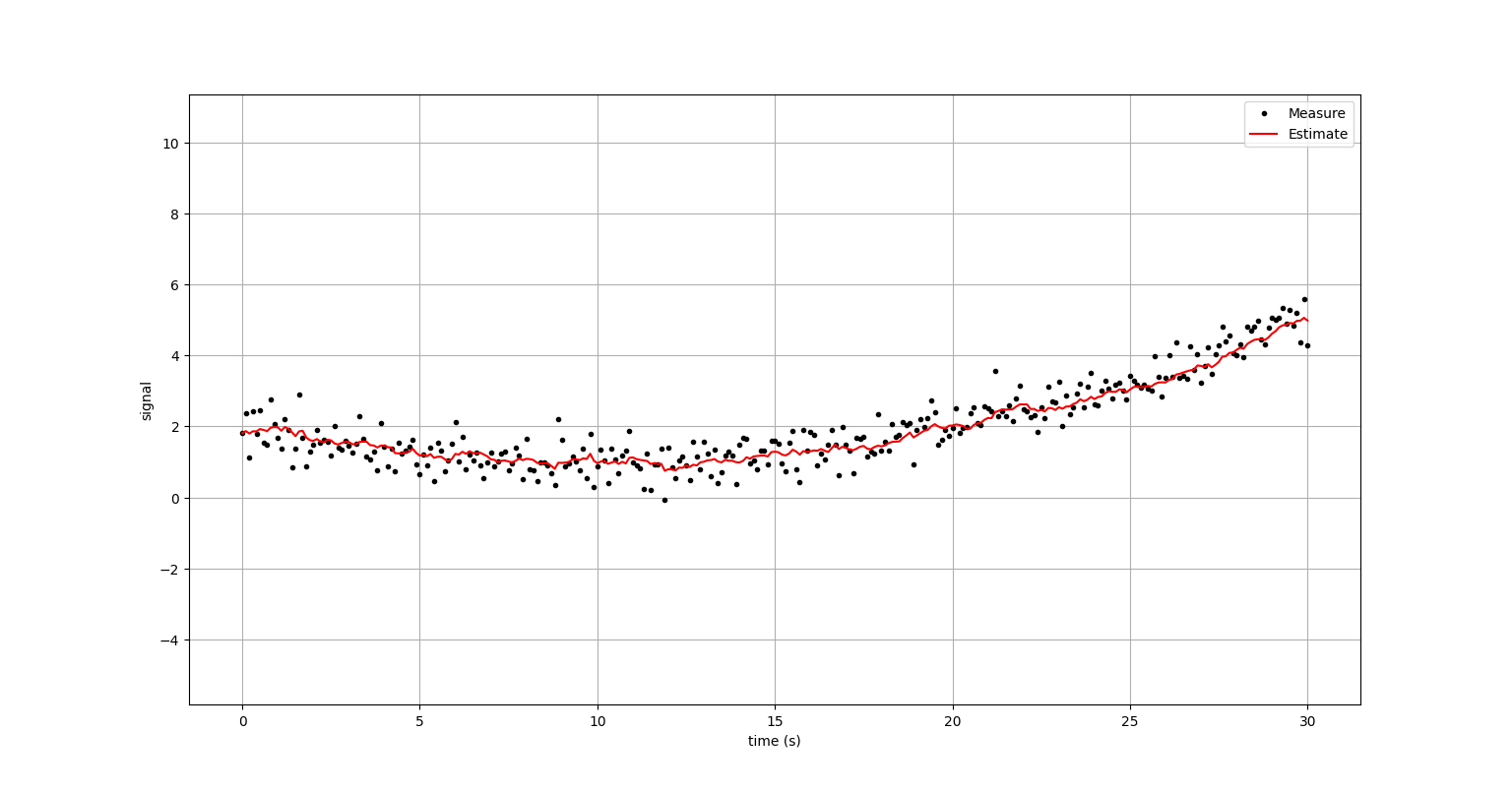
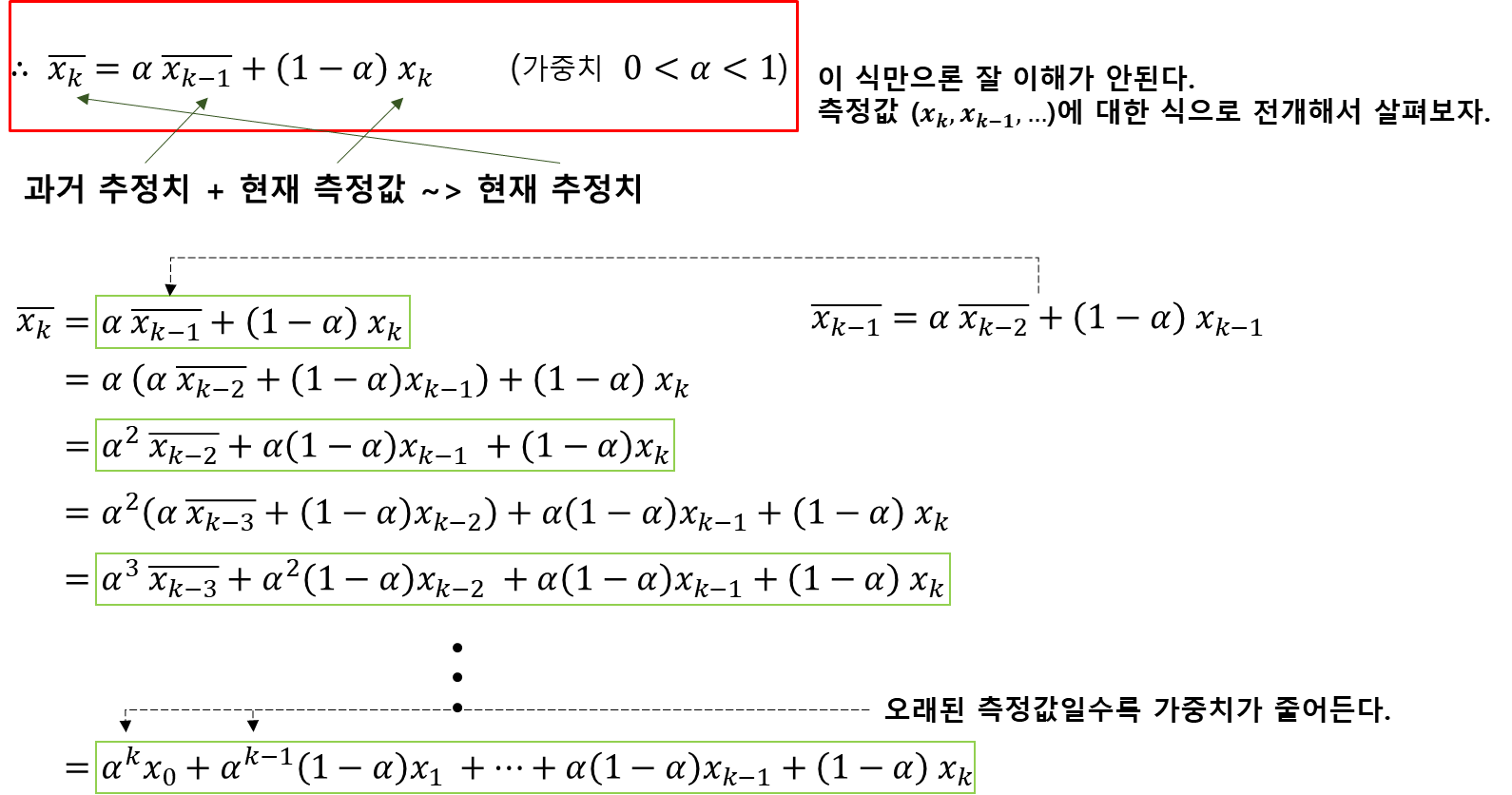
3. Low Pass Filter (저주파통과필터)
-
Low pass란?
- (파장이 짧은)고주파 성분을 제거하고, (파장이 긴)저주파 성분을 통과시킨다.
- 데이터의 잡음을 제거하고 핵심적인 저주파 성분 데이터의 양상을 파악하기 위해 사용한다.
-
평균 필터들의 단점을 보완하고자 데이터의 가중치를 조절할 수 있도록 설계한 필터
- Ex03) LowPassFilter.py
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# 저주파통과필터 클래스
class LowPassFilter:
def __init__(self, y_initial_measure, alpha=0.9):
self.y_estimate = y_initial_measure
self.alpha = alpha
def estimate(self, y_measure):
self.y_measure = y_measure
self.y_estimate = self.alpha * self.y_estimate + (1 - self.alpha) * self.y_measure
if __name__ == "__main__":
signal = pd.read_csv("Data/example_Filter_3.csv")
y_estimate = LowPassFilter(signal.y_measure[0])
for i, row in signal.iterrows():
y_estimate.estimate(signal.y_measure[i])
signal.y_estimate[i] = y_estimate.y_estimate
print(signal)
plt.figure()
plt.plot(signal.time, signal.y_measure,'k.',label = "Measure")
plt.plot(signal.time, signal.y_estimate,'r-',label = "Estimate")
plt.xlabel('time (s)')
plt.ylabel('signal')
plt.legend(loc="best")
plt.title("alpha=0.9")
plt.axis("equal")
plt.grid(True)
plt.show()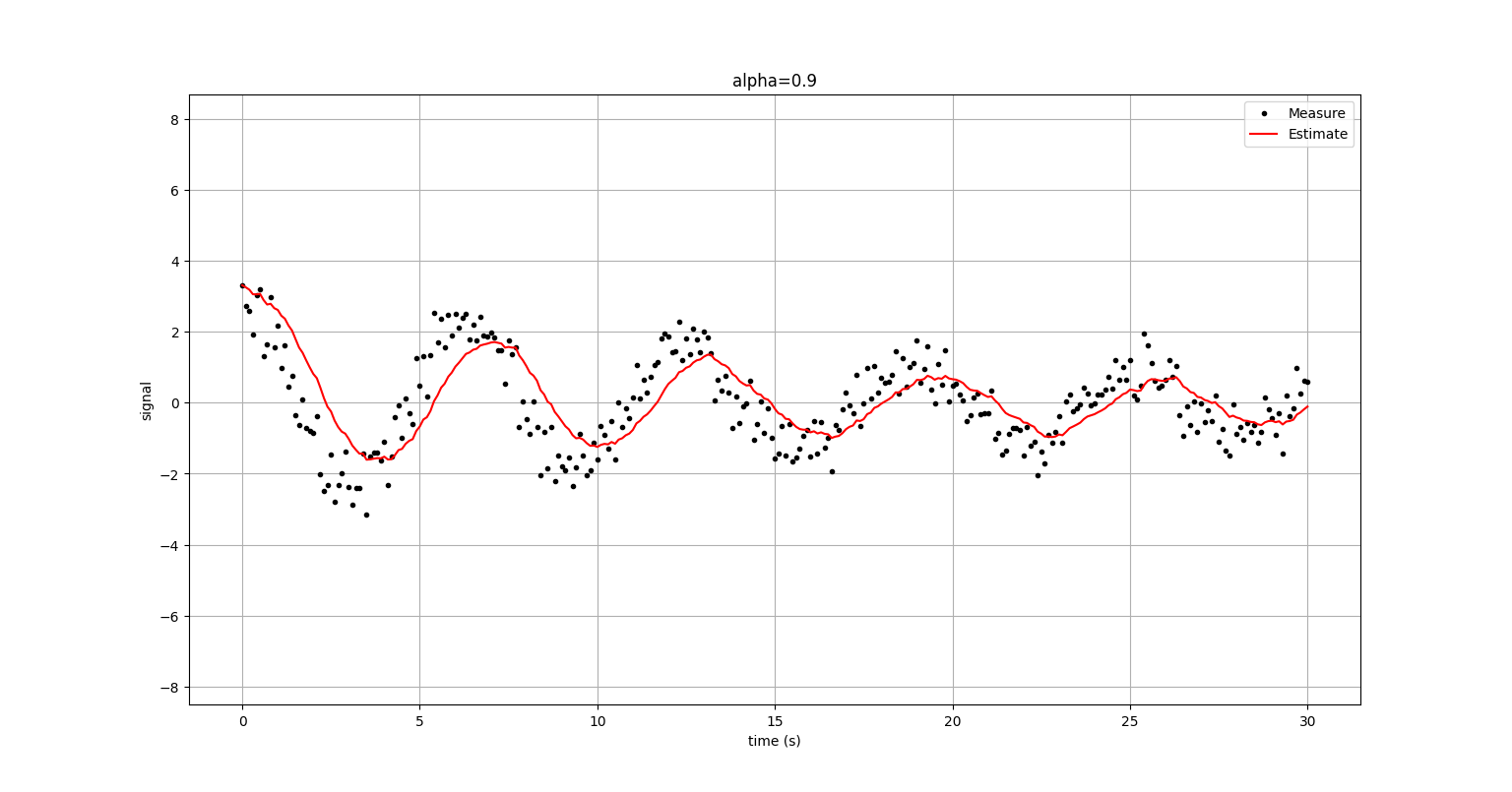
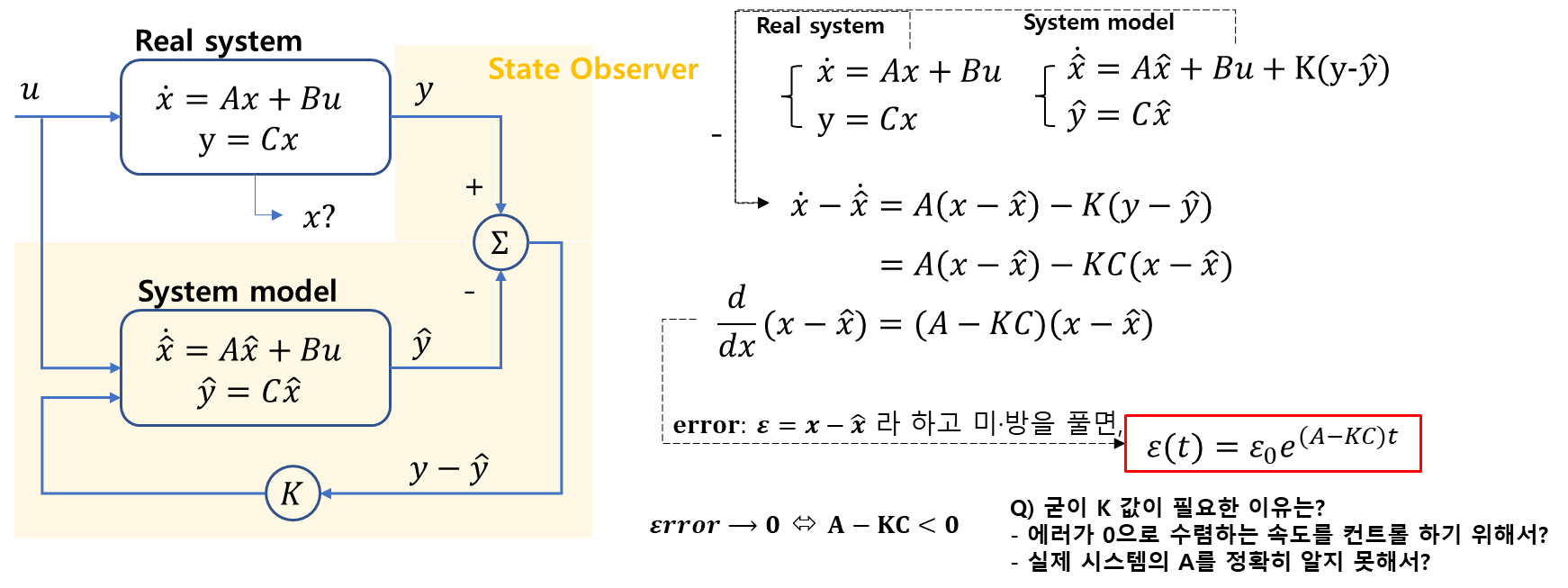
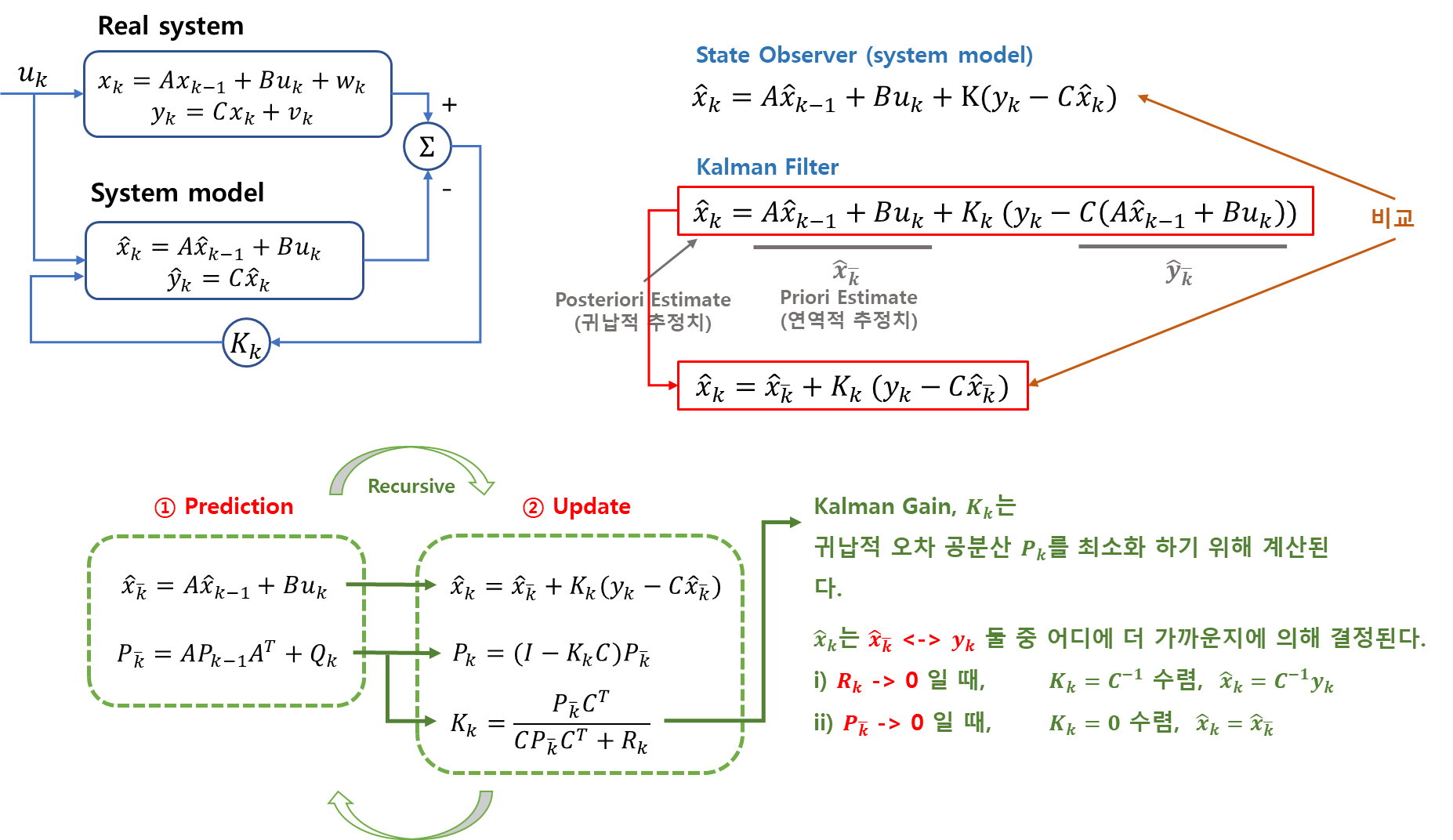
4. State Observers (State Estimator)
-
상태관측기는 직접측정할 수 없는 시스템의 정보를 간접측정을 통해 추정한다.
-
Real system의 measuered state를 알 수 없을 때, system의 수학적 model로 부터의 estimated state를 계산한다.
-
두 state의 차이를 minimize 시키는 것이 제어의 목적이다.
-
Gain값을 어떻게 제어해야 할 지?
~> Kalman Filter는 확률 시스템으로 접근
-
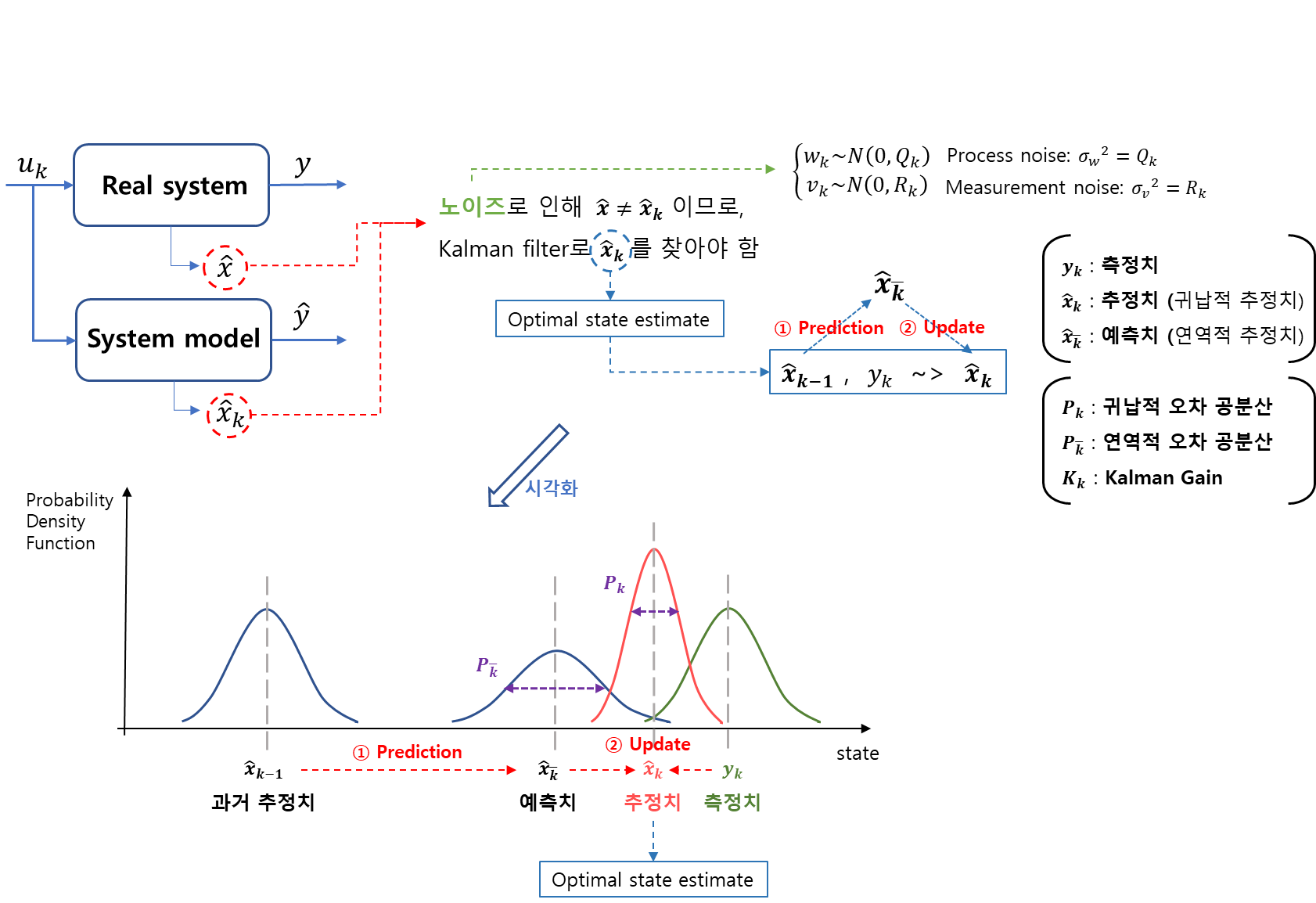
5. Kalman Filter
-
Kalman Filter도 상태관측기의 한 종류이다.
-
과거의 귀납적 추정치 + 측정치를 이용해현재의 귀납적 추정치를 구한다. -
Kalman Filter는 두 단계로 작동한다.
-
Step1)
Predection과거의 귀납적 추정치로현재의 연역적 추정치를 구한다연역적 오차공분산을 구한다.
-
Step2)
Update-
현재의 귀납적 추정치를 구한다. -
귀납적 오차공분산을 구한다. -
Kalman Gain을 구한다.Kalman Gain은귀납적 오차공분산을 최소화 하기 위해 계산된다.
-
-
-
Kalman Filter 시각화(?)
- Algorithm 방정식
- Ex04) KalmanFilter.py
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# 칼만필터 클래스
class KalmanFilter:
# model_variance: Q / measure_variance: R / error_variance_init: Px 초기값
def __init__(self, y_measure_init, step_time=0.1, m=0.1, model_variance=0.01, measure_variance=1.0, error_variance_init=10.0):
# A: state matrix
self.A = np.array([1.0])
# B: input matrix
self.B = step_time / m
# C: output matrix
self.C = np.array([1.0])
# D: direct transmission matrix
self.D = np.array([0.0])
# process noise 표준편차
self.Q = model_variance
# measurement noise 표준편차
self.R = measure_variance
# 초기 귀납적 추정치 = 측정치
self.x_estimate = y_measure_init
# Px: 초기 귀납적 오차 공분산
self.P_estimate = error_variance_init
def estimate(self, y_measure, input_u):
# ****************** Prediction (귀납적 추정치 => 연역적 추정치 구하기) ******************
# 연역적 추정치
x_predict = self.A * self.x_estimate + self.B * input_u
# 연역적 오차 공분산
P_predict = self.A * self.P_estimate * self.A.T + self.Q
# ****************** Update (연역적 추정치 + 측정치 => 귀납적 추정치 구하기) ******************
# Kalman Gain
K = P_predict * self.C.T / (self.C * P_predict * self.C.T + self.R)
# 귀납적 추정치 (결국 이걸로 계산된 값이 최종 추정치로서 결과에 반영된다.)
self.x_estimate = x_predict + K * (y_measure - self.C * x_predict)
# 귀납적 오차 공분산 / np.eye(n) => nxn 크기의 identity matrix / A.shape[0] => A의 행의 개수 / A.shape[1] => A의 열의 개수
self.P_estimate = (np.eye(self.A.shape[0]) - K * self.C) * P_predict
if __name__ == "__main__":
# Load data (엑셀 데이터를 불러오고)
data = pd.read_csv("Data/example_KalmanFilter_1.csv")
# Initialize KalmanFilter (필터를 초기화 한다.)
kalman_filter = KalmanFilter(data.y_measure[0])
# Estimate data
# 계산 전 dataFrame의 'y_extimate'열의 데이터들을 결측치로 초기화 해주는 것 np.nan
data['y_estimate'] = np.nan
# 행, 열 수 만큼 반복 (y_estimate의 계산값을 update한다.)
for i, row in data.iterrows():
# KalmanFilter 클래스의 estimate 메소드를 사용하여 data의 y_measure, u열의 두개의 값으로 y_estimate를 계산하여 반환한다.
kalman_filter.estimate(row['y_measure'], row['u'])
# 반환 된 값을 y_estimate 열의 i번 째 행에 넣는다.
data.at[i, 'y_estimate'] = kalman_filter.x_estimate
print(data)
# Plot results
plt.figure('ex04_KalmanFilter')
plt.plot(data.time, data.y_measure, 'k.', label="Measure")
plt.plot(data.time, data.y_estimate, 'r-', label="Estimate")
plt.xlabel('Time (s)')
plt.ylabel('Signal')
plt.legend(loc="best")
plt.axis("equal")
plt.grid(True)
plt.show()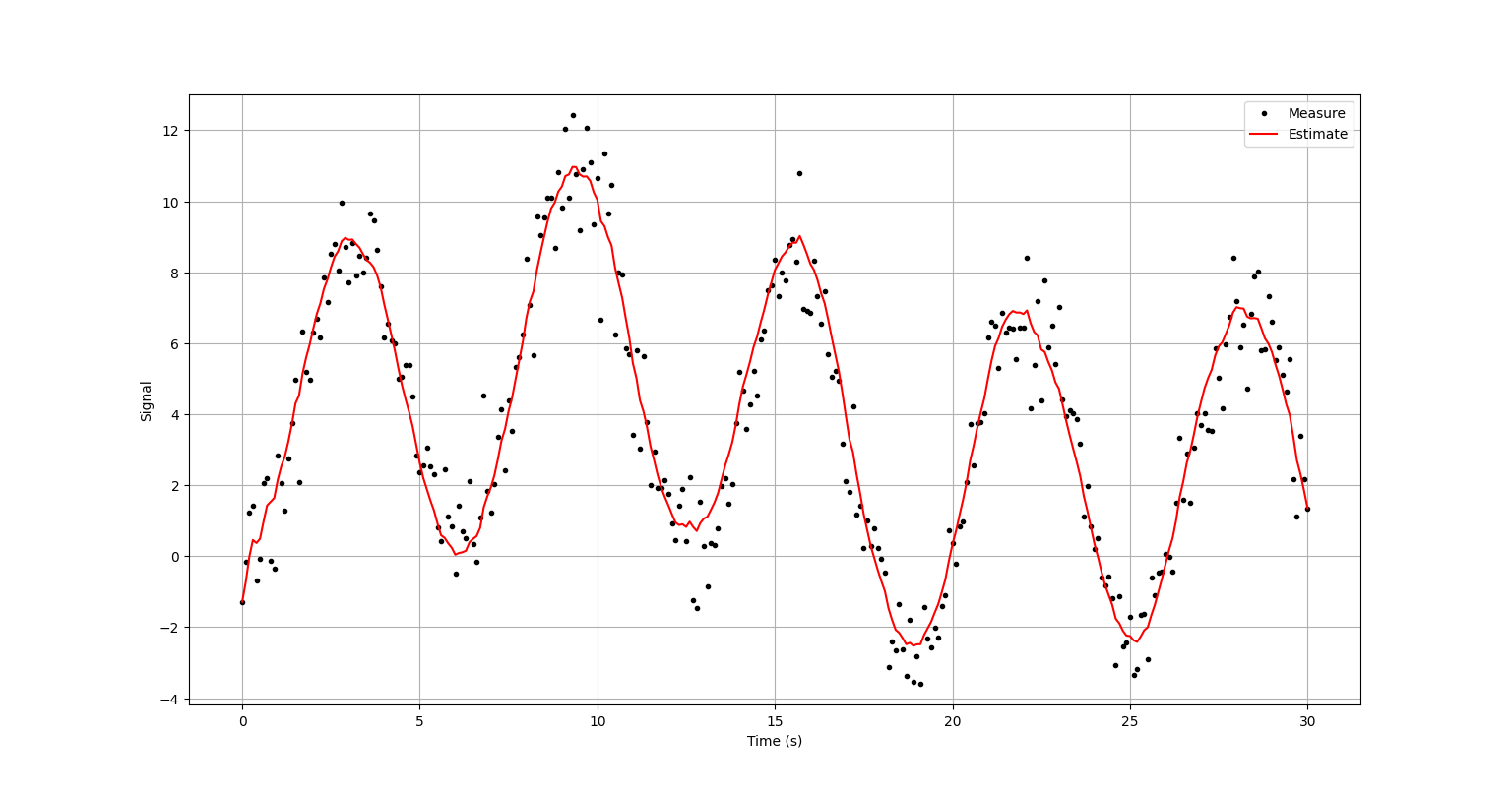
- Ex05) ComparingFilters.py
# 앞에서 작성한 각 Filter class 들을 가져와서 사용한다.
from ex01_AverageFilter import AverageFilter
from ex02_MovingAverageFilter import MovingAverageFilter
from ex03_LowPassFilter import LowPassFilter
from ex04_KalmanFilter import KalmanFilter
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import queue
if __name__ == "__main__":
# 각 필터들에 대한 결과를 리스트로 저장한다.
t = []
y_AF = []
y_MAF = []
y_LPF = []
y_KF = []
# signal 이라는 인스턴스에 시험 데이터를 저장한다.
signal = pd.read_csv("Data/example_KalmanFilter_1.csv")
# instantiate filters
# 각각의 class를 사용하여 필터 가동하여 y_extimate 저장할 인스턴스 생성
y_estimate_AF = AverageFilter(signal.y_measure[0])
y_estimate_MAF = MovingAverageFilter(signal.y_measure[0])
y_estimate_LPF = LowPassFilter(signal.y_measure[0])
y_estimate_KF = KalmanFilter(signal.y_measure[0])
for i, row in signal.iterrows():
# append(): 리스트 맨 뒤에 새로운 요소를 추가하는 함수
t.append(signal.time[i])
# Averageg filter의 추정치 리스트 채우기
y_estimate_AF.estimate(signal.y_measure[i])
y_AF.append(y_estimate_AF.y_estimate)
# Moving Average filter의 추정치 리스트 채우기
y_estimate_MAF.estimate(signal.y_measure[i])
y_MAF.append(y_estimate_MAF.y_estimate)
# Low pass filter의 추정치 리스트 채우기
y_estimate_LPF.estimate(signal.y_measure[i])
y_LPF.append(y_estimate_LPF.y_estimate)
# Kalman filter의 추정치 리스트 채우기
y_estimate_KF.estimate(signal.y_measure[i],signal.u[i])
# KalmanFilter의 계산결과가 2차원 array로 나와 plot이 불가 => item()함수 사용하여 다차원 요소를 scalar 값으로 변환
y_KF.append(y_estimate_KF.x_estimate.item())
# print(y_AF)
# print(y_MAF)
# print(y_LPF)
# print(y_KF)
plt.figure("ex05 Comparing Filter")
plt.plot(signal.time, signal.y_measure,'k.',label = "Measure")
plt.plot(t, y_AF,'m-',label = "Average Filter")
plt.plot(t, y_MAF,'b-',label = "Moving Average Filter")
plt.plot(t, y_LPF,'c-',label = "Low Pass Filter")
plt.plot(t, y_KF,'r-',label = "Kalman Filter")
plt.xlabel('time (s)')
plt.ylabel('signal')
plt.legend(loc="best")
plt.axis("equal")
plt.grid(True)
plt.show()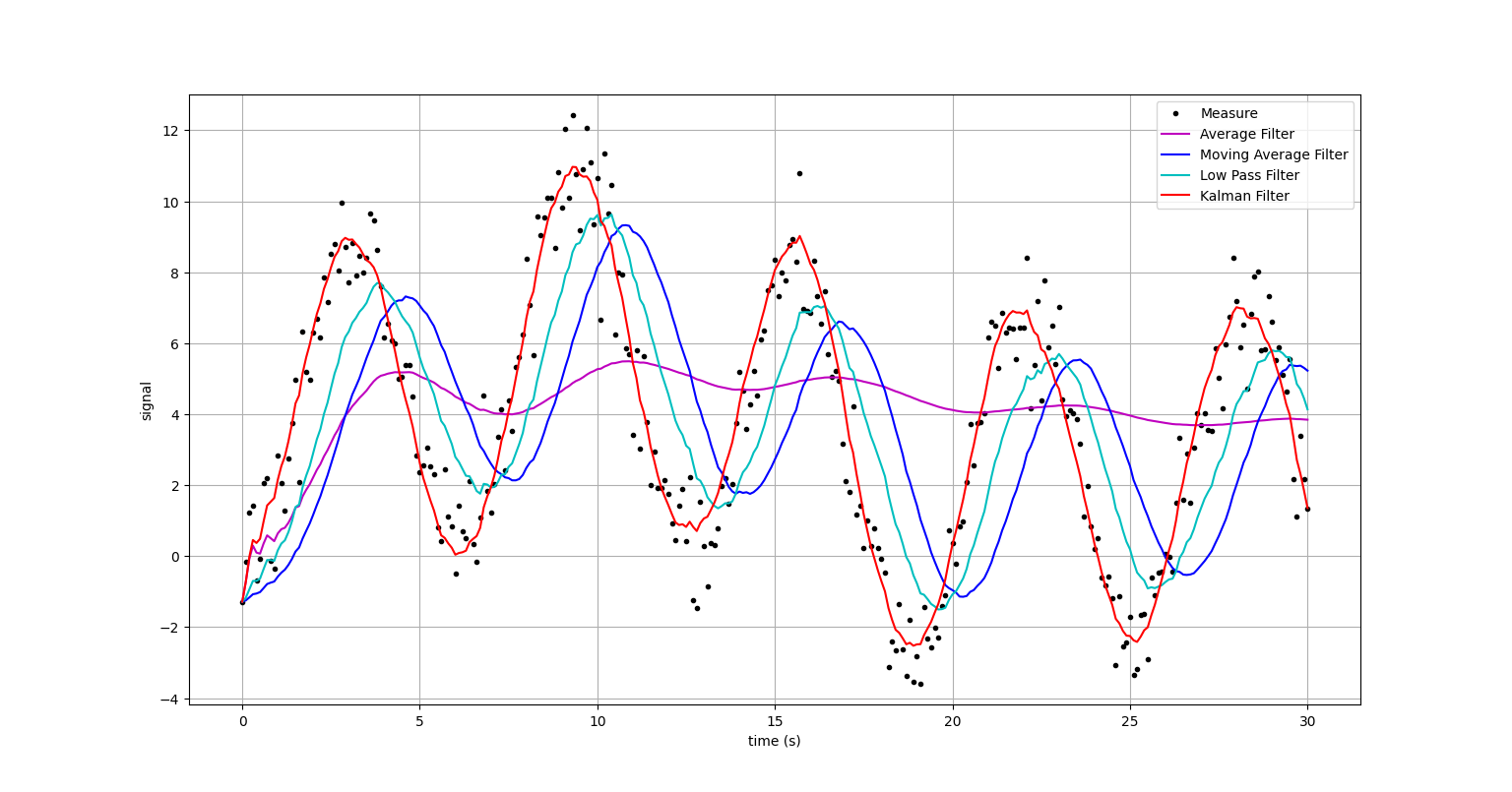
[4] PID Control
-
P control: 현재 error에 대해서만 반응
- 한계: error가 작을 때 원하는 출력을 충분히 내지 못할 수 있다.
-
I control: 오차를 누적시켜 작은 오차에 대해서도 충분한 출력을 낼 수 있다.
- 한계: 오차 누적(Error Acuumulation)을 해결하기 위해 오차가 더해지는 한계를 정해 reset 해줘야 한다. (적분 누적 방지법: Integral Anti-Winde up 필요)
-
D control: P 제어기로만은 수렴하지 않던 시스템을 PD 제어로 수렴시킬 수 있고, 더 나아가 Overshoot을 제어할 수 있다.
-
더 자세한 내용은 학부 때 배운 자동제어 수업 자료 참고하기~
-
PID control 과제를 통해 python으로 직접 구현해 보면서 해당 이론을 더 잘 이해할 수 있는 기회가 되었다.
출처
(1) Programmers K-Digital-Training: 자율주행 데브코스 Planning & Control, 고전제어
(2) 칼만 필터의 이해, youtude,
https://www.youtube.com/watch?v=GfdMKISLRRk&list=PLH1vM2UZr5n9ceEAsgJb20xNLowGEgOqI&index=1
(3) Katsuhiko Ogata, 시스템해석, Pearson-교보문고(2018)
