A High Speed Retro-Reflective Free Space Optics Links With UAV
1. 서론
RF system은 무선 통신 링크를 구현하기 위해 선호되는 기술이다. 또 다른 무선 통신 링크로는
FSO(Free Space Optics)
1. RF spectrum이 부족한 곳
2. terminal의 SWaP(크기, 무게, 전력)에 제약이 있는 곳에 대체되어 높은 성능을 제공 가능
3. optical beam의 높은 직진성 때문에 RF에서 보다 더 안전한 link를 제공 가능
기존 대칭의 FSO system은 송신단말기가 수신 단말기를 향하도록 복잡한 PAT(지향 및 트래킹) 알고리즘을 사용.
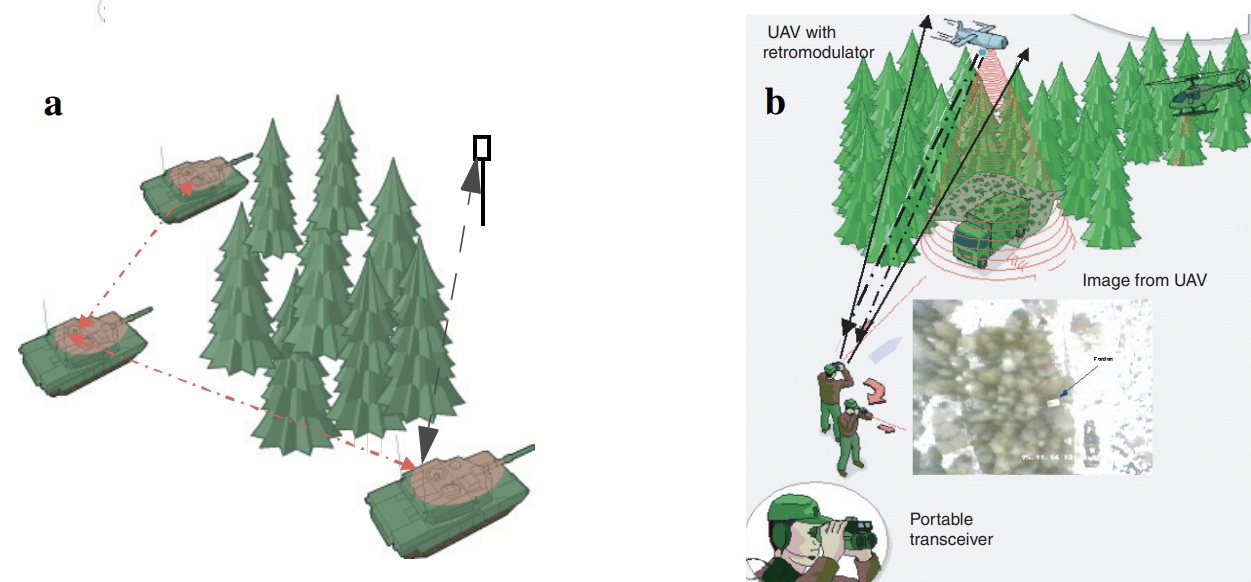
UAV 또는 고고도 모사인공위성(인공위성 x, 기상관측풍선 등)와 같은 SWaP의 제한을 크게 받는 곳에는 기존의 대칭적 FSO 시스템은 비실현적. RFSO(되반사, Retro-reflective free space optics) 시스템은 이러한 단점을 극복.
- RFSO Link는 변조가 되지 않은 높은 파워의 laser beam(interrogating beam, 참조 레이저)을 사용.
- 이 laser는 지상 단말기으로부터 출발하여 모바일 단말의 MRR(Modulating Retro-reflector, 되반사 변조기)로 지향.
- MRR은 입사된 laser의 일부는 지상 단말기로 반사시킴.
MRR은 mobile 단말 → 지상으로 반사되는 beam을 data에 따라 변조시키는 shutter인 변조기를 포함. - 반사된 beam은 지상 단말기의 reveiver에 의해 감지.
1.1 MRR 구현방식
LC (Liquid Crystal)
LC optical shutter는 corner-cube retro reflector 앞에 위치함. Boston에서 Lincoln Laboratory 연구진들이 632nm 파장대에서 30~50ns의 높은 속도의 LC를 구현함.
단점: 1500nm C-band wavelength가 주로 FSO 통신에 사용되는데, LC에 요구되는 물질의 viscosity(점도)가 증가하여 device의 응답 시간을 수백 µs 수준로 증가시킨다.
MEMs (Micro Electro Mechanical) devices
속이 빈 corner cube에 retro-reflector의 한 면에 MEMs deformable mirror를 사용.
- mirror의 표면은 유연한 재질로 반사시킴. 빛을 조절하고 교정하는 데 사용
- mirror의 표면은 개별적인 액추에이터로 나뉘어 있으며, 각 actuator는 미세하게 움직일 수 있음. mirror의 형태를 조절함으로써 laser를 난반사시키거나 정반사 시킬 수 있음.
장점: deformable mirror는 높은 CR(밝은 부분 밝기/어두운 부분의 밝기)와 넓은 FOV를 제공.
단점: switching speed가 ~1MHz 대로 제한된다.
Electro Aboprtion modulators (EAMs)
반사모드에서 작동하는 EAM 변조기에 interrogating beam의 초점을 맞추는 접이식 Telecentric(원근 왜곡을 제거한 렌즈) optical system으로 구성.
EAM은 Quantum-confined Stark 효과를 사용하여 동작하는데, 외부 전기장을 걸어주면 quantum well의 빛 흡수 스펙트럼에 영향을 줌. 이는 미 해군 연구실에서 lab에서 70Mbps, 야외에서 45Mbps 속도의 data link로 실현함.
- Performance of Cat’s eye modulating retro-reflectors for free-space optical communications ,
- 45 Mbps cat's eye modulating retroreflector link over 7 Km
이 논문에서는 UAV-지상간 data link를 통신 거리는 560m에서 500Mbps로 MRR을 사용하여 구현한다.
Novelty
Pixelation을 통해 EAM의 capacitance를 줄이고 modulator의 bandwidth를 증가시키는 새로운 EAM 기반 MRR을 사용
2. System Design(지상단말기, MRR)
지상단말기와 UAV에 마운트된 terminal로 구성되어 있다.
1. 지상단말기에는 높은 출력 변조되지 않은 laser(interrogator용)와 UAV 위치로 interrogator beam을 지향할 수 있도록 높은 정확도의 tracking system.
2. UAV는 MRR를 탑재. interrogator beam 일부를 모아 그 다음에 변조하고 지상단말기로 다시 되반사시킴.
2.1 지상단말기 Design
Coarse Tracking와 Fine-Tracking Module로 구성.
2.1.1 Coarse Trackiing System
기계적인 김발을 사용하여 지상단말기를 회전할 수 있고, 또한 fine-tracking optical system도 내부적으로 포함한다.
-
김발(FLIR PTU-D300E)
pan과 tilt Unit은 넓은 범위의 작동을 제공한다. 수평회전(Pan)은 335°, 수직회전(tilt)는 120°를 지원한다. 페이로드는 15.9 kg
PTU는 가시광선 CCD camera와 video tracker board인 FLIR Vilga의 비디오 영상에 의해 제어된다.

-
가변 줌 렌즈(Computar H30Z1015)
긴 거리에서 video tracker의 정확도를 증가시키기 위해 사용.
FOV 또한 ±9.1° ~ ±0.297°까지 조절 가능.

2.1.2 Fine-Tracking System
빠르고 높은 지향 정확도와 오차범위 ±0.3° 안으로로 작동.
지상-UAV 단말기간의 매우 정확한 정렬이 요구되기 때문에 이 모듈이 필수적.
플랫폼에 존재할 수 있는 진동과 beam wander(치우침)과 같은 대기 turbulence 효과로 인한 요동에도 대처해야 한다.
Experimental Study on Beam Wander Under Varying Atmospheric Turbulence Conditions
bi-static 배치로 배열된 transmitter와 reveiver 광학 시스템. 이 디자인은 두 광학 체인 간의 분리를 향상시키지만 무게가 늘어난다.
Bi-staic 배치
무선 통신 시스템의 송신과 수신이 서로 다른 위치에 있을 때 사용되거나 분리된 경우.
Transmitter 부
Laser Source
4W로 제한. 1561nm CW fibre-coupled source.
- 유럽 표준기준인 BS EN60825-1:2014 중 eye-safe로 분류.
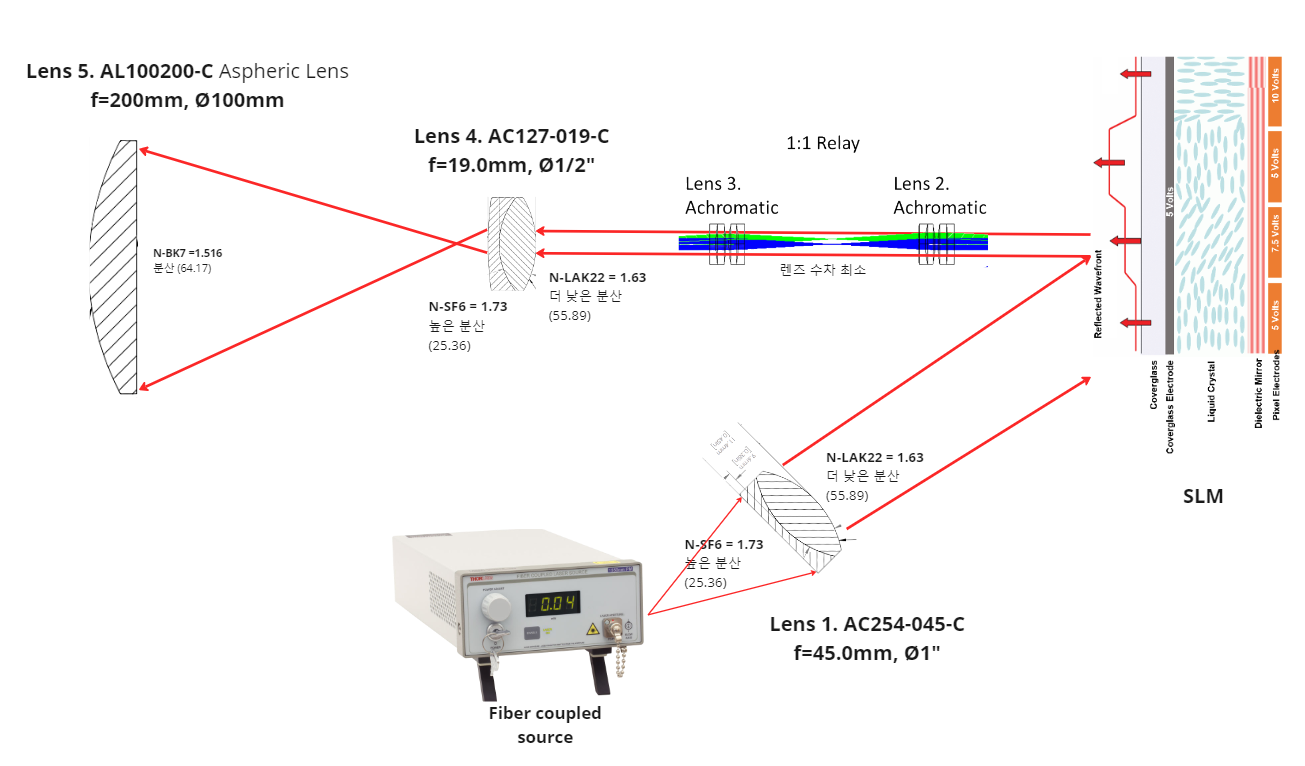
- irradiance(방사조도)가 초과하면 안됨.1번 색수차 렌즈(AC254-045-C)
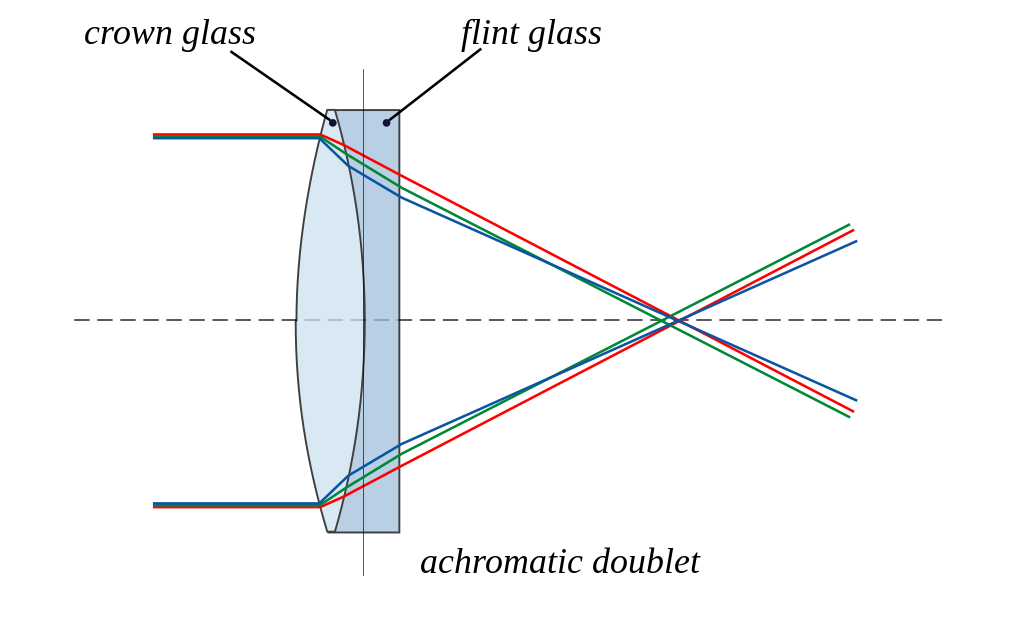
R,B 광선을 같은 초점으로 하는 Achromatic 색수차 렌즈를 이용하여 광선을 평행시킴.Spatial Light Modulator (Meadowlark HSP512-1550)
Off-axis 배치(1번렌즈를 통과한 광선의 원래 정렬과 다른 각도로 배치됨)
8bit 분해능으로 최대 3π 위상차를 각인할 수 있음.- Phase gratings
phase를 spatial하게 벼화시키는데, beam이 지나갈 때 phase을 주기적으로 바꿈.
beam을 최대 ±2.96°까지 아날로그적으로 조향. - Phase profiles
beam의 phase가 spatial하게 어떻게 변화하는지.
beam divergence(발산)와 high order aberration correction(고차 수차, 빛의 파면이 굴절 성분에 불규칙성에 의해 생긴 왜곡)을 제어.
- Phase gratings
1:1 2,3번 렌즈 relay system
1:1 relay system은 렌즈를 통과하는 빛이 렌즈를 통과하기 전과 후에서 동일한 크기와 배율로 보이게 한다.
optical 경로 수차(aberration)를 최소화함.4번 렌즈(AC127-019-C)
beam expander(5,6번 렌즈)를 사용하여 광선의 지름을 10배 확장된다.
이 확장은 transmitter chain의 FOV를 ±0.296°로 줄여준다.5번 비구면 렌즈(AL100200-C)
TX aperture에서 beam의 지름은79mm
Receiver 부
MRR에서 반사된 빛은 70mm 구경의 optical system에 의해 지상단말기에서 모아진다.
-
1번 비구면 렌즈(AL100200-C) -
2번 렌즈(AL2018-C) -
3번 렌즈(Optics 45826)
2.2 MRR Design
MRR은 cat's eye design.
primary lens system은 interrogating beam을 EAM으로 초점을 맞추는 역할. 이러한 설계는 MRR의 구경(Aperture)를 증가시켜, 수신 전력이 구경(Aperture)의 4 제곱에 비례하므로 System Link Budget에 상당한 영향을 미침. [11]
2.2.1 EAM design
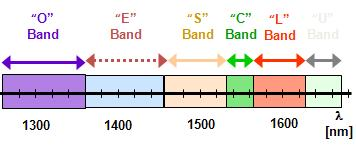
surface-normal EAM은 C-band에 최적화되어 있고, RISE에서 설계.
80 Coupled InGaAs/InAlAs MQW(Multiple Quantum Well)가 비대칭인 Fabry-Perot cavity(동공)에 내장됨.
InGaAs/InAlAs
1550nm와 1300nm 파장을 구현 가능. conduction band offset이 0.52eV로 다른 InGaAs/InP, AlGaAs/GaAs보다 전자 구속력이 크고, 온도 유지 장치가 필요없이 고출력 레이저 제작 가능.
Fabry-Perot cavity
반사율이 큰 2장의 거울을 일정 거리에서 마주보게한 Cavity 구조
- cavity 안에서 발생한 광파와 반사된 광파가 상보적 간섭 및 상쇄적 간섭을 일으킴
- 이중에 특정 파장의 광파 만 남고 나머지는 모두 상쇄되어,
- 특정 파장의 광파 만이 선별적으로 통과하여 출력함.
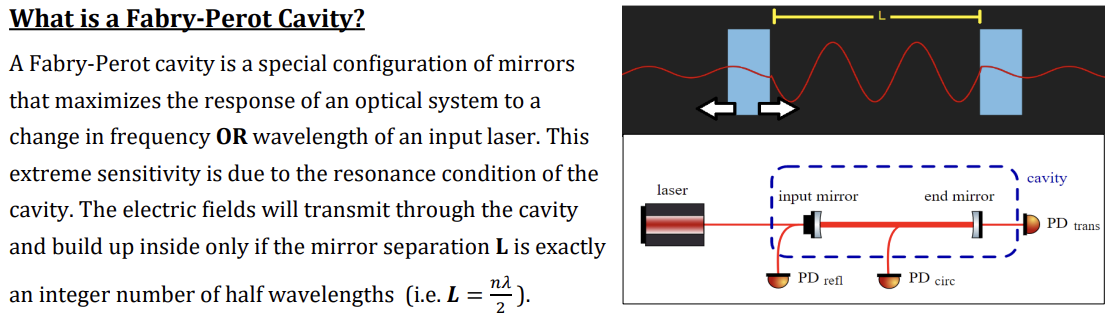
이러한 디자인은 두께의 modulator로 수용가능한 Insertion Loss(신호가 전달되는 동안 시스템이나 장치에서 얼마나 감쇄되는지)와 함께 좋은 CR(Contrast Ratio)를 보여준다.
MQW(Multiple Quantum Well)의 bandwidth는 active area에 반비례한다.
6 * 6 배열로 각 modulator는 1~2Gbps를 변조시킬 수 있다,
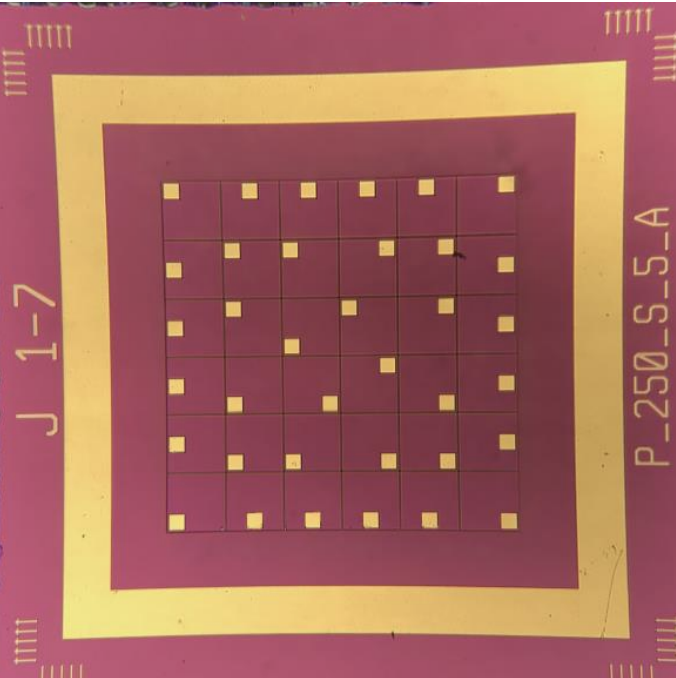
250μm x 250μm의 pixel과 5μm의 간격을 가져 충분히 분리시키고 1650μm x 1650μm 크기로 만듬. pixel들을 driver electronics에 연결하기 위해 작은 wire-bonding pad도 추가.
자세한 만들기(High Speed Electro-Absorption Modulator for Long Range Retroreflective Free Space Optics)
2.2.2 Driver electronics
Driver electronics는 Data source와 MRR간의 interface 역할을 한다.
각 pixel에 적절한 전압을 인가.
Low voltage differential signals(LVDS)는 MRR에 이진 DATA를 input으로 제공.
- LVDS Fan-out buffer 1:8
8개의 독립적인 output을 제공. 각 output에 최대로 흐를 수 있는 전류가 제한되어 있는데, 부하를 나누어 8분의 1로 load를 나눈다. (1개의 output신호에 접속할 수 있는 input 신호의 수는 제한) TI LVDS Owner's Manual
-
Preamplifer 1:2
각 output들은 dual output stages를 사용하여 pre-amplify(선증폭)된다. (총 16 driver outputs이 된다.) -
EAM driver 1:2
각 line은 EAM에서 2개의 pixel과 연결되어 있다.
모서리 4개 pixel들은 light footprint로 사용되지 않는다. 구동되는 2개 pixel들은 병렬적으로 MRR driver power의 소비를 줄인다.
이러한 구성으로, 전체 시스템은 8W이고 안쓰는 상태의 pixel과 driver를 smart switching을 통해 더 줄일 수 있다.
모든 EAM pixel의 음극(-)은 4.6V의 공통 전압과 연결된다.
2.2.3 Optical System
2개의 lens로 11mm의 유효 aperture(구경)과 ±3.2°의 fov를 가진다.
1번 렌즈: Aspheric plano-convex 렌즈는 12.5mm 직경과 25mm 초점거리
2번 렌즈: Achromatic Doublet 렌즈는 9mm 직경과 12mm 초점거리
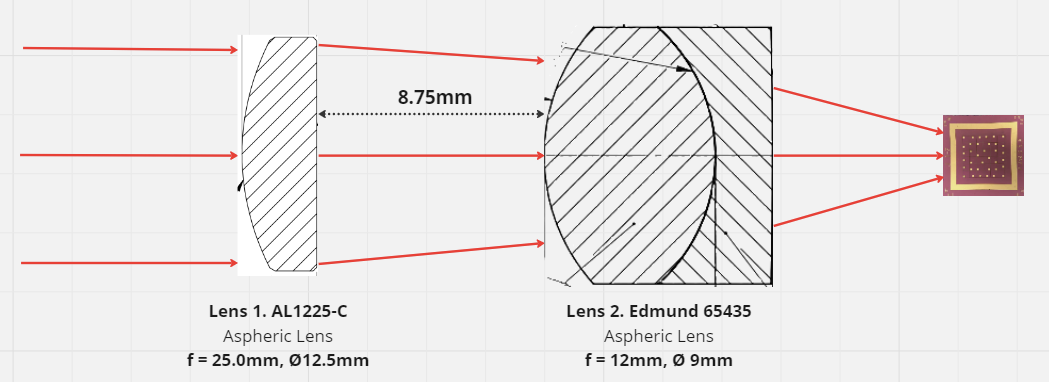
초점 평면에서 EAM의 정확한 축 위치는 BEAM이 EAM을 반사한 후 회절한계(Diffracton-limited)로 되반사되기 위해 필수적이다.
추가적으로 EAM은 광학 축에 법선벡터여야 interrogator beam과 반사된 beam 사이에 angular offset(각 차이)가 나는 것을 방지할 수 있다.
다른 입사각에서 diffaction encircled energy를 보여준다.
이상적인 광학 시스템은 이고, 입사각 2°까지 을 가질 것이다. 최대 입사각 3.2°에서 를 가진다. 이 광학 시스템은 20°C에 맞게 디자인되고, 0~50도 극한 온도에서 입사각 2°까지 가 1.7까지 증가한다.
diffraction encircled energy는 point source의 총 에너지 중 렌즈의 중심에서 특정 반경 내에 얼마나 많은 에너지가 포함되어 있는지를 측정한 값입. 이것은 종종 중심으로부터의 거리에 따른 누적 에너지를 보여주는 그래프로 표시. 즉, 빛이 중심에서 멀어질수록 강도가 얼마나 빨리 감소하는지를 설명.
(beam propagation ratio):
Divergence: how much the laser beam spreads out as it propagates. A lower M² value, more collimated beam.
Beam diameter: the size of the laser beam. A smaller beam diameter contributes to a lower M² value.
Mode profile: how closely the beam profile resembles an ideal Gaussian profile. Gaussian-shaped beam will have a lower M² value.
3. link budget과 실험 결과
3.1 Link budget
| Parameter | Value |
|---|---|
| Laser power() | 4W (36dBm = ) |
| Transmitter loses( | 1.67dB |
| Interrogator beam diameter | 8cm |
| Transmitter | 1.1 (beam divergence 18μrads) |
| MRR | 1.3 |
| Atmospheric absorption loses() | 0.4dB/km |
| Link range | 560m |
| Bi-static loses() | 13.7dB |
| MRR aperture | 11mm |
| Receiver aperture diameter | 8cm |
| EAM inertion loses() | 11.5dB |
| Data receiver loses() | 9.5dB |
| Data receiver sensitivity | -37dBm (=0.2mW) |
dBm과 dB의 차이점
1mW = 0dBm
10mW = 10dBm
100mW = 20dBm
1000mW = 1W = 30dBm =0dB(W)
data receiver인 photo-detector는 lab에서 측정되었고,
실험실에서 photo-dector의 민감도를 측정하니 -37dBm이 나왔다. BER은 위 조건에서 보다 작게 나왔다.
| SNR values | 요구 조건 |
|---|---|
| 5dB ~ 10dB | 원하는 신호와 거의 구별할 수 없는 noise level로 인해 연결을 설정하기 위한 최소 level보다 낮음 |
| 10dB ~ 15dB | 신뢰할 수 없는 연결을 설정하는데 허용된 최소값. |
| 15dB ~ 25dB | 일반적으로 poor 연결을 설정하는데 최소한으로 허용된 level |
| 25dB ~ 40dB | 좋음 |
| 41dB < | 최상 |
Ex) 디바이스의 라디오가 -65dBm(dB/mW)의 신호를 수신하고 noise floor가 -80dBm인 경우, 그 결과 SNR이 15dB. → 이 무선 연결 신호 강도는 15dB
link budget 계산식
| 변수 | 설명 |
|---|---|
| data photo-detector에서 평균적으로 얻은 optical power | |
| interrogator beam의 optical power | |
| transmitter와 receiver의 loss | |
| MRR에서 Interrogator beam의 기하학적 loss | |
| monostatic configuration로 간주되는 ground station에서 되반사된 빔의 기하학적 loss | |
| bi-static 구성으로 인해 loss 증가를 나타냄 | |
| 대기 흡수 loss | |
| EAM의 insertion loss |
-
는 MRR에서 Interrogator beam 크기와 구경의 지름의 제곱의 비로 계산된다. MRR에서 beam 크기는
source의 크기(8cm)와Rayleigh length,M^2값과link 거리에 의해 계산된다. 이러한 방법으로 반사되어 지상단말기로 들어가는 beam의 지름을 구할 수 있다. -
지상단말기의 bi-static 구성은 짧은 거리에서 link budget 계산할 때는 안 좋은 영향을 준다.
560m의 거리에서 대략 13.7dB의 loss ()가 생긴다. receiver와 transmitter 구경의 offset으로 인해.
mono-static 시스템인 경우보다 geometrical loss가 더 커진다. 은 bi-static으로써 발생하는 손실의 증가를 의미한다. 이러한 loss는 반사된 빔이 receiver가 아닌 지상단말기 transmitter와 receiver 조리개 중심에 있기에 발생.()
위의 식에 따라서 예측한 평균 수신 power는 는 -19.59dBm= 이다.
3.2 Static tests(고정 테스트)
지상단말기로부터 250m 떨어진 곳에 삼각대 위에 MRR을 세워 실험 진행.
- 1561nm CW(Continuous Wave) interrogator beam을 20dBm(=100mW=0.1W)의 power로 지상단말기에서 MRR로 전송한다.
- MRR은 NRZ(Non Return-to-Zero) on-off-keying(OOK)으로 500Mbps Xilinx ML507 검사 보드가 생성시킨 임의의 random binary sequence(
PRBS)를 사용하여 변조된다. - 지상 단말기에서 수신한 신호(photo-detector의 output)은 높은 속도의 oscilloscope로 sampling된다.
- Adative thresholding 기술로 대기 난류에 의해 생긴 낮은 주파수 intesity variation을 제거한다.
- 위 processing을 한 후 신호 캡처 후 eye diagram 그리기
- 성공적인 thresholding과 sampling을 하도록 수용가능한 SNR뿐만 아니라 수신된 신호의 제한된 jitter를 보여줌.
- 수신된 optical power는 -19.21dBm이다.
Decision Feedback Equalizer(DFE)는 MRR driver electronics에 의해 추가된 inter-symbol interference의 일부를 제거하는데 사용. 이 equalizer는 35, 25 feed-forward와 feedback filter taps를 각각 사용하고 350bit의 sequence는 filter에 train된다.
BER은 6초 주기 이상에서 측정되었다.
대부분 error들은 대기 난류에 의한 scintillation 효과 때문에 생긴다.
하지만 이 BER은 충분히 작아 error-free link가 FEC(forward error correction) codes와 interleavers를 사용하여 달성가능하다.
3.3 Dynamic tests(드론 테스트)
Octocopter(Cinestar 8's Mikrokopter)에 MRR을 탑재한 후 수행.

통신 범위: 560m
- interrogator의 beam 출력은 4W(=36dBm)까지 올림.
- 전송 파워의 증가는 손실을 보상하는 게 필요함.
- 지상 단말기에서 coarse tracking이 MRR을 지향하면, fine-tracking module이 acquistion stage를 시작하여, MRR을 위치를 획득한다.
- SLM은 beam의 divergence를 증가시키는 데 사용되고 raster 스캔이 수행된다.
beam의 divergence 증가는 가파르게 FOV를 커버할 수 있도록 한다. - MRR로부터 강한 반사가 일어나면, 지상단말기에 위치한 InGaAs tracking camera에 감지되자말자, interrogator beam이 평행(collimation)으로 return되고 tracking stage가 활성화된다. 이 과정 모두 자동화.
- 전송되고 수신된 data를 보면, optical power의 평균은 -17.96dBm()으로 data photo-detector에 측정됨. link budget simulation에서 -19.59dBm()으로 추정함. 시뮬레이션 결과가 1.5dB 더 낮다. 또한 한 주기가 8ns이므로 대략 125MHz로 추정됨.
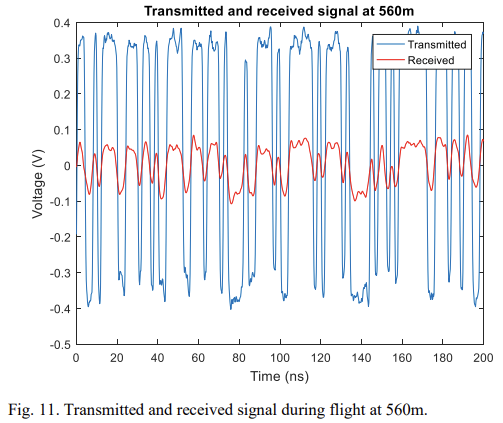
- 이러한 불일치는 MRR 광학 장치의 사소한 잘못된 align으로 인해 발생된다. 이로 인해 MRR에 반사된 beam의 발산이 증가하고 bi-static loss가 줄어든다.
MRR 1.6 값은 Link Budget과 실험 사이에 더 가깝게 일치하게 한다.
-8.45dB 정도
static test와 비슷하게 수신된 신호는 adaptive thresholding과 DFE에 후처리된다. link의 안정성은 아래에 따라 달라짐.
1. 기동하는 동안 UAV의 heading 정확도
2. MRR의 FOV 한계
3. 실험날 바람조건
몇 초동안의 burst data(data가 갑자기 빠르게 전송, 송수신되는 현상)에 대해 BER은 이다. 이 BER은 FEC code로 처리가능하고 error-free link를 제공할 수 있다.
FEC code: data bit에 추가 정보 bit를 추가하여 오류를 검출하거나 수정하는데 사용
4. 결론 및 후속 연구
MRR 기반 통신은 UAV나 높은 SWaP을 요구하는 platform에 적합하다.
560M 거리에서 500Mbps data link 조건에서 BER은 이다.
현재 야외 RFSO(Reflect Free Space Optical) data link에서 가장 빠르다.
향후 MRR 구동 장치를 개선하여 data rate를 1Gbps를 높이고, 장기간에 pixel의 수를 증가시켜서 MRR FOV를 증가시키고, 혹한 날씨 조건에서도 data link가 강건함을 갖도록 한다. 지상단말기에서는, 추후 fibre based detector를 사용하는 것이 요구된다. single mode fibre로의 Coupling light는 EDFA 증폭기와 fibre detector를 사용함으로써, bandwidth와 receiver system의 민감도를 증가시킨다.
