Optical Beam Steering in FSO systems supported by Computer Vision
A. C. Campos, P. Georgieva, M. A. Fernandes, P. P. Monteiro, G. M. Fernandes and F. P. Guiomar, "Optical Beam Steering in FSO Systems Supported by Computer Vision," in IEEE Access, vol. 12, pp. 73793-73809, 2024, doi: 10.1109/ACCESS.2024.3405196. keywords: {Cameras;Optical transmitters;Optical receivers;Transceivers;Adaptive optics;Optical fibers;Lenses;Free-space optical communication;Computer vision;Free-space optics;pointing;acquisition and tracking mechanisms;automatic alignment;computer vision},
초록
FSO는 높은 전송 속도, 구현 편의성, 낮은 비용, 등록 필요없는 스펙트럼
초기 정렬 또는 광범위한 수동 구성 없이 송수신기 사이를 초기 정렬을 달성하는 중요한 문제에 직면해있다.
초기 정렬 과정은 시간 소모적이고 현재 IR camera로만 IR 파장 대 빔으로만 자동화되어있고 게다가 송수신기의 비용이 증가하고 또한 GPS에만 의존하는 초기 수렴 단계가 필요하다.
이 문제를 해결하기 위해, 새로운 솔루션의 자동정렬이 초기 수렴이 필요없고 IR camera의 비싼 비용을 줄일 수 있다. CV를 이용해서 가시광선 비콘과 PAT 기술을 통해서 효율적이고 초기 거친 정렬을 가시광선 CMOS 카메라를 이요한다.
게다가 어떤 초기수렴 단계가 필요없고 가시광선 전송동안 특성 기반의 정렬 때문에 경사각과 pixel 수 개수와 관련해서 기반으로 정렬한다.
추가적으로 이런 정렬은 OA간 angular 정렬오차가 최대 +-3.3도를 허용하고, 이는 20m에서 5.3m^2 수렴 영역이다.
최종적으로 link는 다른 주변광 조건에서 실시간 16Gbps까지 달성했다.
##Introduction
5G -> 6G로 갈수록 기기 수가 증가하면서 높은 대역폭 새로운 무선통신 용량이 필수적. RF 주파수 대역의 혼잡으로 대안이 요구되는데 FSO는 많은 관심을 받고 있음.
FSO는 넓은 주파수, RF 대비, 높은 데이터 속도. 설치에 대한 구현을 고려하면 LOS만 확보되면, 추가적으로 면허, 작동 cost가 낮다.
- M. A. Khalighi and M. Uysal, "Survey on Free Space Optical Communication: A Communication Theory Perspective," in IEEE Communications Surveys & Tutorials, vol. 16, no. 4, pp. 2231-2258, Fourthquarter 2014
보안에서는 FSO 통신은 좁은 발산각으로 적외선 직징성 빔을 이용하는 것이 가로막는 것이 문제인데 이는 또한 도청을 막음.
추가적으로 RF system에 있는 전파 주파수 간섭에 강인하다.
- H. Kaushal and G. Kaddoum, "Optical Communication in Space: Challenges and Mitigation Techniques," in IEEE Communications Surveys & Tutorials, vol. 19, no. 1, pp. 57-96, Firstquarter 2017
FSO system의 장점을 기반으로, 여러가지 application 적용 가능.
초기 FSO 통신은 last mile 문제의 솔루션으로써 주목을 받음. fiber optic link 또는 토굴비용이 높은 곳에 설치가 어려운 지역일 때 이 문제가 대두
last mile problem
네트워크 인프라에서 사용자에게 최종 연결을 제공하는 구간에서 발생하는 문제를 말합니다. 이는 주로 인터넷 서비스 제공자(ISP)와 최종 사용자 간의 연결에서 발생하는데, 이 구간이 가장 비용이 많이 들고 기술적으로 복잡
비용: 도시지역은 기존 인프라가 복잡 추가 x, 농촌 비용 회수 어렵. 일부 지형적 장애물 때문에 연결이 어려움,
최근 FSO는 5G 뿐만 아니라 6G mobile acess에 적용에 매력적
- M. A. Fernandes, P. P. Monteiro and F. P. Guiomar, "Free-Space Terabit Optical Interconnects," in Journal of Lightwave Technology, vol. 40, no. 5, pp. 1519-1526, 1 March1, 2022
UAV에 의존한 수직적 무선네트워크 확장이 준비되야하고, 성층권에서 전략적 포지셔닝 때문에 최근 인기도를 얻는다. 이 시설은 거의 고정적이고 상당히 신뢰된 LOS 연결 가능.
또한 6G에 증진되는 3D network 확정에 의해 발전되거나 인공위성 통신 용량 향상에 FSO 시스템 이용이 관심받고 있다.
FSO 시스템의 장점과 시장 성장에도 불구하고, 기술이 한계가 있다. 지상 FSO 시스템은 대기 매질을 통해 전송하므로 다양한 날씨 조건에 민감하고 통신 성능과 타협
대기 난류와 흡수는 optical signal 전파에서 변동을 일으키고, 중요한 loss와 낮아진 전송 신호를 일으킨다.
- H. Kaushal and G. Kaddoum, "Optical Communication in Space: Challenges and Mitigation Techniques," in IEEE Communications Surveys & Tutorials, vol. 19, no. 1, pp. 57-96, Firstquarter 2017
송수신기 사이 정확한 정렬은 모든 FSO 시스템의 중요한 문제인데, 부정확한 정렬은 pointing error나 최적이 아닌 AoA, 연속적으로 상당한 power loss 수신기에서
- 송수신기 사이 정확한 정렬을 보장하기 위해 PAT가 이 오정렬을 보상.
- 다른 큰 문제는 사전(GPS) 지식 없이 Optical head 사이의 초기 정렬
초기 구성, 사전-정렬 또는 광범위한 수동 구성 없이 광통신하게 하는 것이 중대하다.
PAT mechanism들은 송신기를 수신기에 정렬하는 (Pointing)
optical signal을 receiver에 입사하도록 보장하는 (Acquistion)
광통신 중 신호 정렬 유지 ( Tracking )
- Y. Kaymak, R. Rojas-Cessa, J. Feng, N. Ansari, M. Zhou and T. Zhang, "A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications," in IEEE Communications Surveys & Tutorials, vol. 20, no. 2, pp. 1104-1123, Secondquarter 2018
PAT를 통한 alignment 과정은 coarse and fine로 나눔.
FSO의 송수신기가 사전 특성 정보가 시스템에 없고 오정렬된 상태에서 시작하면 PAT는 거친 정렬을 실행
우선적인 역할로 거친 PAT가 초기 정렬을 송신기, 수신기 사이에 달성할 수 있도록 연속된 정확한 정렬로.
흔히 거친 PAT는 카메라 GPS 기반
여러 단계의 coarse 정렬이 필요하고 통신 실패 시 error 고침이 필요.
연속적으로, 정밀 PAT 단계가 거친 PAT를 보상한다. 송수신기 사이 정렬에서 더 높은 정확도를 달성하도록 목표를 한다.
정밀 PAT가 correct minor distrurbances(pointing error와 aoa 변동울)를 쉽게 고쳐질 수 있기 때문에
여기서 정밀 PAT는 다수 장치(김발, 거울, AO), tailorred algortihm(특정 문제나 응용 분야에 맞게 설계되고 최적화된 알고리즘)의 received optical power를 최대화하는 목표로.
게다가 복합 PAT는 각 유형의 메커니즘의 장점을 통합하고, 잠재적으로 송수신기 사이 FoV와 정렬 정확도를 최적화한다.
이 논문에서는 FSO 시스템에서 송수신기간 초기 거친 정렬을 효과적으로 강인한 기술을 제안하고 더 세밀하고 정확한 2번째 정렬로써의 가능성을 확인한다.
이를 위해 PAT(카메라와 김발)의 기반으로 자동 정렬을 사용하여 가시광선 비콘을 CV를 이용한다.
가시광선 비콘 사용을 초기 거친 추적은 간단히 CMOS로도 가능하게. 비용절감적 IR camera에 비해서
게다가 더 낮은 가격과 라즈베리파이를 통해서 구동하게끔 해서 에너지 효율성과 접근성이 높지 않게
복잡성 측면에서, 단독 거친 PAT를 사용하고 이전 수렴 PAT는 필요없을 수가 있어 기존 연구와 달리. GPS와 거친 정렬 토대로
20m에서 효과성 분석 전송속도 16Gbps
SectionII에서는 자동 정렬 구현 방법. 알고리즘 구조
Section III에서는 제안된 CV 기법의 실험적 유효성 검증. FSO system의 정렬을 20m에서 수행했을 때
Section IV에서는 실시간 16Gbps 속도 자동정렬 기법 유효성 평가
II. CV를 통한 FSO 정렬
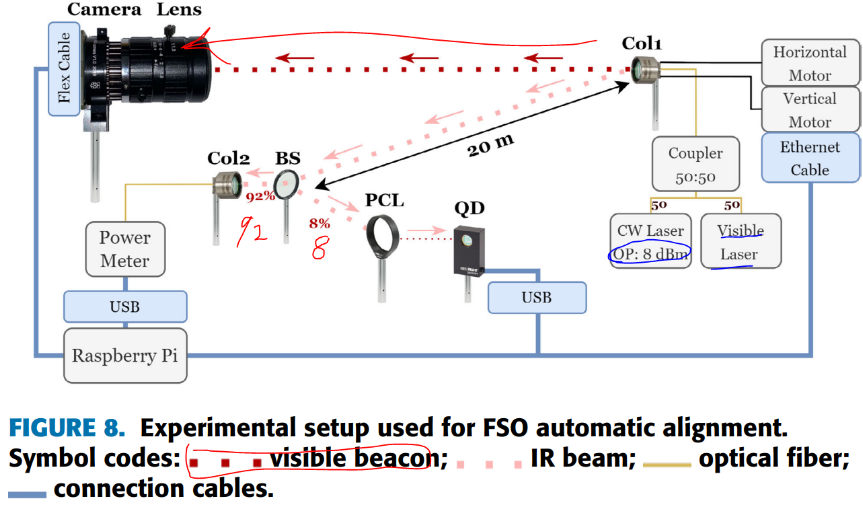
OA에서 구별되는 2 파장 빛에 따라서, (IR은 정밀추적, visible은 거친추적)
2개의 기초적인 phase로 나뉘는데
1. 초기 거친 정렬은 CV를 사용하여 달성, 가시광선 비콘 방출로부터 cmos camera로 정렬할 수 있다.
- OpenCV를 이용해서, 라즈베리파이를 통해 빔 steering ontrol을 하고, 정확하게 비콘을 통해 OAtx와 카메라 간의 정렬이 맞도록
2. 정밀 추적은 optical power maximization 기반으로 수행되는데 OA_RX를 수신하고 OA_TX를 정렬하면서. OA_TX와 CMOS 카메라 사이에 정렬된것에서 시작하면, 이 단계는 오직 수신된 IR beam에 획득한 정보에 의존.
3. 이 목적을 위해 BS, PSD에 의한 OA_RX가 도움받는다.
4. IR beam에서 BS에 의해 반사되고 PSD를 직접 때리게 되는데, ir beam이 psd에 입사되는 위치를 정확히 결정된다. 이 정보를 기반으로 OA_TX의 방향을 조정하면 OA_RX에서 전력의 reception을 가능하게 하거나 FSO 시스템의 정확한 정렬을 보장한다.
가시광성 비콘 사용하여 비용 효과적 FSO 정렬
1. FSO 수신기와 송신기의 정렬를 구현하기 위해서, 라즈베리파이 카메라에서 얻은 이미지들은 OA_TX 방향에 따라 얇게, 다른 방향 얇게 이렇게 맺히게 된다.
2. 비콘의 가시성을 향상시키기 위하고 주변광을 제거하기 위해서는 가시광선 비콘 이미지를 디지털줌으로 확대하여 최대한 클로즈업에서 캡쳐
3. 추가적으로, 카메라 렌즈를 OA 평면에 초점을 맞춘다.
4. 이미지를 분석하면 비콘이 타원형일때 (카메라와 오정렬이고, 6방향 별모양일 때 카메라 렌즈의 중심과 정렬되어 있는 형태다)
5. camera 렌즈에 따라 OA의 방향을 다르게 고려하면 왜 그렇게 가시광선 비콘 모양이 생겼는지 알게된다.
6.가시광선 비콘을 관찰했을 때 ANGLE OF INCLINATION에 따라 가시광선 비콘 변화가 타원으로 묘사된다.
다른 한편으로 별모양으로 보이면 비콘이 카메라 렌즈에 정렬된거고 3가지 요소로 설명할 수 있는데, 카메라 센서 빛 채도, 빛 회절, 렌즈의 기하구조.
OPENCV framework
가시광 비콘이 카메라를 통해 오정렬됐는지 확인을 위해, 관찰된 타원 특성을 분석을 해야한다.
이미지에서 elliptical shape을 감지하고 묘사해야되는데,
타원이 y축으로 부터 틀려진 각도를 계산하는 것.
1. 원래 이미지에서 비콘 주변 상에 수동 디지털 줌을 적용.
2. image에서 contour들을 감지
1. 가우시안 필터를 이미지를 매끈하게 노이즈를 줄이고
2. HSV 컬러 공간으로 변환
3. 컬러 범위 정의를 용이하게 함으로써
3. 이미지에서 red pixel들을 구별하기 위해 binary mask 적용 (비콘 색깔에 대응되는 특정 범위안의 값)이러면
- 특정 대역 내 red pixel 값들은 흰색이 되고 나머지를 검정
4. 추가적으로 morphological opening 연산 수행(kernel)
- 노이즈를 없애고 dilation 후 erosion을 통해 디테일 살리기. contour를 감지하게 쉽도록
5. 변환 수행 기반으로 contour가 binary image 결과에서 contour가 식별 된다면, 타원 fit을 가능하게
6. 타원 모양으로 fitting시켜서, 타원 중심 위치, major, minor 축에 대한 특성얻고, y축과 타원의 주축 틀어진 각도 구하기
7. 이 각도는 0~180도이며, 0도 180도는 타원의 수직 방향을 보여주고, 89도는 타원이 수평방향임을 보여준다.
타원의 틀어진 각도의 변동을 규명하기 위해, OA_TX에 대해 넓은 범위로 azimuth와 elevation을 스캔하여 2D 위치 행렬에 대응되도록 비콘 빔 특성을 대응.
잘 정의된 지역은 타원을 0~180도 수평으로, 수직 90도로 정렬하려는 경향이 있다. y축에 비교해서. 따라서, 타원에 틀어진 각도에 기반하여, 완전한 2D sweep으로부터 모든 위치를 규명할 수 있다. 단 highlight된 부분을 제외하고. [단점]
white color에 대응되는 inclination 되는 ellipse들은 타원이 놓여지지 않는 범위이고 따라서 대응되는 틀어진 각도를 얻을 수 없다. 이 현상은 비콘이 부분적으로 또는 완전히 정렬됐기 때문에 발생했기 때문에 타원 형태를 더이상 띄지 않는다.
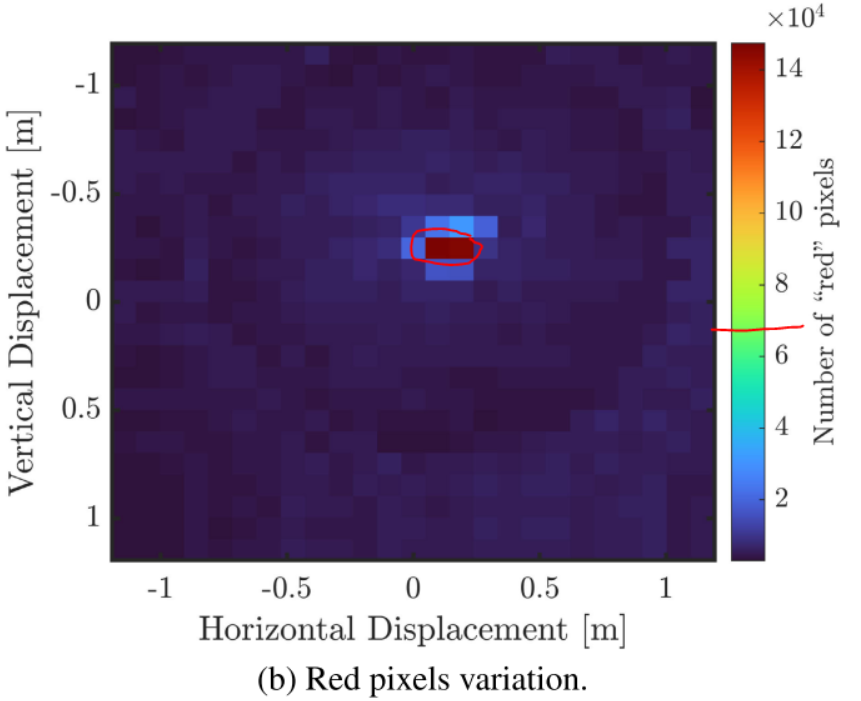
흰색으로 식별된 공간 영역을 특징짓기 위해, 우리는 레드 픽셀 수에서 변동을 2D scan을 통해서 볼 수 있었는데, non zero 값을 구해서.
가장 높은 값의 레드 픽셀 수의 위치는 위치와 우연히 일치했다. 틀어진 각도를 얻을 수 없는 부분과. 이는 camera lens와 비콘 사이에 가장 정확한 정렬에 가까이 있는 위치에 대응되는
따라서, 수신기 평면에서 빔의 2차원 위치를 명확하게 특성하기 위한 강력한 접근 법은 제공된 정보를 함께 고려함으로써 달성할 수 있다.
즉, 1단계에서 타원의 틀어짐 각도를 감지하고, 2단계에서 각 이미지의 red pixel의 갯수를 구했다.
다중 적응형 빔 정렬 알고리즘
FSO 시스템을 정렬하기 위해서, 제안된 정렬 과정은 2단계로 나눌 수 있다.
1. coarse 요약
1. 송수신기 사이 정렬 오차를 최소화하기 위해서 수행되고 CV를 적용하여 카메라 렌즈에 촬영된 상과 전송된 가시광 비콘 특성을 적용함으로써
2. fine 요약
1. 세밀한 정렬은 IR beam의 power 측정 기반이며. 이를 달성하기 위해, PSD의 정보를 기반으로 정렬이 이루어진다.
2. 결과적으로, Gradient Descent 방식으로 수신 광전력을 최대화하는 방향으로 이루어진다.
3. 이 알고리즘 역시, 송수신기가 초기 오정렬되고 시스템에 대한 정보가 없을 때 수행
1) 초기 Coarse 정렬
첫 단계는 초기 coarse 정렬을 수행하는 것이 목표고 이를 통해 몇 cm 이내로 정렬 오차가. 이 끝에, 사용된 어떤 사전 정보 없이 과정을 시작한다. 타원의 틀어진 각도와 red 픽셀 개수의 특성을 통해, beacon이 camera에 들어오지 않았을 때 동일한 특성을 공유하는 여러 가지 위치가 나타나 초기 위치를 결정하는데 어려움이 발생한다. 따라서, 초기 정렬 과정은 수신기 평면에서 x축 또는 y축을 따라 beam 위치를 sweep하기 위해 OA_TX를 작동 시키는 것부터 시작할 수 있다.
일반성을 잃지 않고 초기 SWEEP을 x축을 따라(수신 평면에서 투사된 수평선을 따라), 각각의 새로운 위치에서, 타원의 틀어진 각도는 배열에 저장된다.
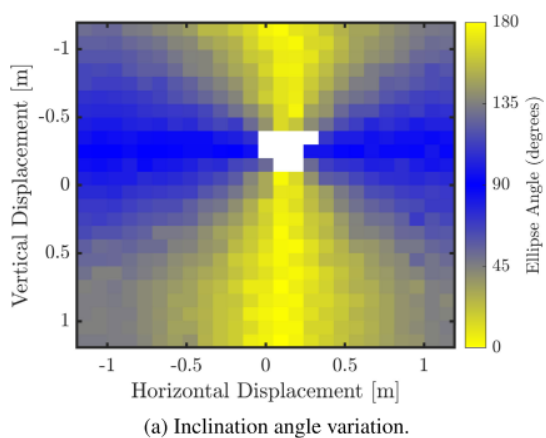
- 틀어진 각도(Incliation angle)이 0 deg, 180 deg일 때
- 비콘이 카메라에 대해 x축에 대해 수직적으로(x=0) 정렬되어 있고, 타원이 수직 방향을 갖는다.
x축을 따라 모든 위치 스캔이 끝나고 타원의 틀어진 각도의 값과 비교하여, PAT가 타원의 최적 수직 방향으로 대응되는 위치(vertical displacement) 값으로 beacon을 움직인다.
그 후, x축이 정렬된 위치(x=0)에서 y축 정렬을 시작한다. 이전과 같은 방법이지만, 이번에는 y축 상 모든 위치를 가면서 red pixel 갯수를 count한다. (x축 고정되어 있는 상태)
이 방법에서는, y축을 따라 새로운 각 위치에서 저장되는 red pixel 갯수를 저장하면서 scan이 끝나면, PAT 비콘을 red pixel들의 갯수가 가장 큰 지점으로 움직이도록 한다.
따라서 beacon은 x,y축 상에 카메라 렌즈 상 또는 가까이에 있게 된다.
2) Red pixel 갯수 기반 Gradient Descent
가시광선 비콘이 카메라 렌즈에 완전히 입사되는 것을 보장하기 위해, red pixel 카운팅 기반 GD 최적화가 수행된다. GD 알고리즘을 구현하는 것은 이미지상 최대 red pixel count를 찾기 위한 것. 결과적으로 정확하게 카메라 렌즈에 입사되도록 한다.
GD는 일반적인 최소 문제를 해결하는 반복적인 최적화 알고리즘이다. 이 방법으로 가파른 gradient로 알고리즘이 이동하게, 현재 위치에서 gradient를 사용하여 다음 지점을 반복적으로 계산핟.
게다가, step size는 정의된 학습률에 따라 조정하고 현재 위치에서 획득한 값을 빼서, cost function을 줄이는 방향으로 움직인다.
이 경우 red pixel count가 가장 높은 지점을 찾는 것이 목표이다.
k=1에서 시작하여, 2단계에서 x축을 따라 다음 위취를 찾는 것을 시작하는데, x(k+1). red pixel의 수를 계산하면 [x(1),y(1)]에서는 N(1)인 것이다.
red pixel의 최대 수에 대한 사전 정보가 없기 때문에, GD 알고리즘은 dynamic target을 삽입해야 한다.
GD 최대 target은 delta N을 추가하여 정의되는데, 초기에 측정된 red pixel 수이다. 즉 N_max(k) = N(k) + delta N이다.
이 방법으로, x축 상 다음 위치, x(k+1)은 아래 표현으로 얻을 수 있는데, f는 GD cost 함수이다.
x(k+1) = x(k) + f(N(k), N_max(k))
다음 x축 상 새로운 위치 [x(k+1), y(k)] 움직인 후에, 비슷한 과정을 y축 상으로 적용한다.
y(k+1) = y(k) +f(N(k), N_max(k))
이렇게 x,y 새로운 축 위치로 움직인 후, red pixel의 수를 세면서 N(k)가 update되고, 현재 targe value와 비교한다. N(k)가 최대 N_max(k) 값에 도달하면, N_max(k) 값은 delta N 값만큼으로 N_max(k) 값을 update한다. 실험적으로 여기서는 delta N은 70000이다.
오차가 클수록 이동. 작을수록 작은 이동.
1. 초기화 단계
1. 특정 시작 위치에서 시작하여 해당 위치에서 red pixel 수 계산
2. 최대 red pixel 수
2. 다음 위치 계산
1. 현재 위치 에서 계산
2.
- 학습률() x 최적화방향 x 절댓값차이
3. 로 이동 후 얻기
4.
5. 로 이동 후 얻기
6. 이면 다시 계ㄴㅇㅂ산
1. j=1 초기화
2. 얻고,
3.
7. 이면
1. ,
2. 2.2로 이동.
3. 일때까지 시도
1. 도달하지 못한 경우, 더 이상 개선 불가능한 포화 상태. 알고리즘 종료.
2. 현재 설정된 목표 값이 달성 가능한 최대 red pixel 수 초과
이렇게 하면 가시광 비콘을 이제 끌 수 있으며, 이후 단계는 정보를 담고 있는 적외선(IR) 빔을 기반으로 수행되어, 전송된 광 신호를 수신할 수 있게 됩니다.
3) PSD 센서로 정렬
-
빔이 OA 렌즈에 맞고 있는지 확인:
- 현재 수신된 광 신호 전력 를 기준 전력 와 비교.
- 현재 광 신호 전력이 기준 전력 이상이면, IR 빔이 OA 렌즈와 정렬된 상태로 간주하고 4단계로 진행.
-
기준 전력에 도달하지 못한 경우:
- 빔이 OA 렌즈의 중심에 가깝지만 정확히 맞지 않은 상황을 의미.
- 이 경우, IR 빔이 PSD(Position Sensor Device)에 맞고 있는지 확인 필요.
-
PSD에서의 두 번째 확인:
- PSD에서 얻은 총 전압 가 사전 정의된 최소 전압 와 같거나 큰지 평가.- 가 이상이면, IR 빔이 PSD에 맞고 있다고 가정.
- 그렇지 않으면, 이전 정렬에 문제가 발생하여 빔이 PSD에 매우 가깝지만 맞지 않은 상태로 판단.
-
문제 해결을 위한 스위핑:
- 빔이 아래로 이동한 후 남겨진 위치 주변에서 작은 정사각형 스위핑을 수행.
- 스캔의 목표는 PSD에서 감지된 전압 가 최소 전압 이상인 위치를 찾는 것.
- 이 조건이 충족되면 빔이 PSD에 정확히 맞고 있다고 결론.
-
PSD 중심으로 빔 이동을 위한 사전 보정:
- PSD의 중심으로 빔을 이동시키기 전에, OARX 앞의 빔 스플리터(BS)가 빔의 일부를 PSD로 반사하기 때문에 사전 보정 필요.
- 보정을 통해 IR 빔이 PSD의 중심에 맞을 때 OA 렌즈에서 수신된 전력이 목표 전력 이상이 되도록 설정.
-
PSD 중심으로의 정렬:
- 빔을 PSD의 중심으로 이동시키기 위해, PSD에서 감지된 최소 전압이 이상이어야 함.
- 조건이 충족되면, IR 빔은 PSD의 중심과 정렬됨.
- IR 빔의 현재 위치 를 PSD의 중심 위치 과 비교하여, 정확한 정렬을 통해 다음 최종 정렬 단계로 진행할 수 있는 충분한 광 신호 전력을 확보.
4) 수신 Power 기반 Gradient Descent
정밀 정렬 마지막 단계는 실제 수신 fiber에 집광되는 광전력 기반이다.
목표는 OA 렌즈가 IR beam과 정렬하기 위해 최대 전력을 유지하고 수신하는 것이다.
수신 광전력으로부터 정보를 사용하여, GD 접근이 수행된다. FSO link가 정렬되는 것을 유지하기 위해서 optical power를 연속적으로 측정하는 기법에 기반.
red pixel 수 대신 수신 파워를 최대화하기 위한 목적 함수만 변하면 된다.
여기서는 로 실험적으로 설정했다. 최대 반복수로.
마지막 더 정밀한 정확도가 요구되는 정렬 단계에서, adaptive GD target이 도입하면 로 갈수록, 언제든지(즉, 포화 지점에 들어갈 때) 를 달성할 수 있다.
학습률
적용성과 도전
1) 예상되는 응용 시나리오
실내 환경의 intra-datacenter 연결성이나 산업 5.0에 적용.
그럼에도 불구하고, 다단계 정렬 방식이 실외 시나리오에 굉장히 도전적이다. inter building communications
- Abu Jahid, Mohammed H. Alsharif, Trevor J. Hall, A contemporary survey on free space optical communication: Potentials, technical challenges, recent advances and research direction,Journal of Network and Computer Applications, Volume 200, 2022, 103311, https://doi.org/10.1016/j.jnca.2021.103311.
6G fronthaul/backhaul - A. Fayad, T. Cinkler and J. Rak, "5G/6G optical fronthaul modeling: cost and energy consumption assessment," in Journal of Optical Communications and Networking, vol. 15, no. 9, pp. D33-D46, September 2023, doi: 10.1364/JOCN.486547
- M. Alzenad, M. Z. Shakir, H. Yanikomeroglu and M. -S. Alouini, "FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks," in IEEE Communications Magazine, vol. 56, no. 1, pp. 218-224, Jan. 2018, doi: 10.1109/MCOM.2017.1600735.
last-mile access - Atheer A. Sabri, Samir M. Hameed, and Wael A. H. Hadi, Last mile access-based FSO and VLC systems
3D optical communications, UAV FSO - N. J. Nzekwu, M. A. Fernandes, G. M. Fernandes, P. P. Monteiro, and F. P. Guiomar, ‘‘A comprehensive review of UAV-assisted FSO relay systems,’’ Photonics, vol. 11, no. 3, p. 274, Mar. 2024.
실외에서 되면
1. 더 쉬운 보급
2. 이동 연결성(celluar) 강한 LOS 유지 확보지역, 이동성 통제, 자연재해 위급상황
