자율주행
1.자율주행을 위한 ROS 시작하기(1)
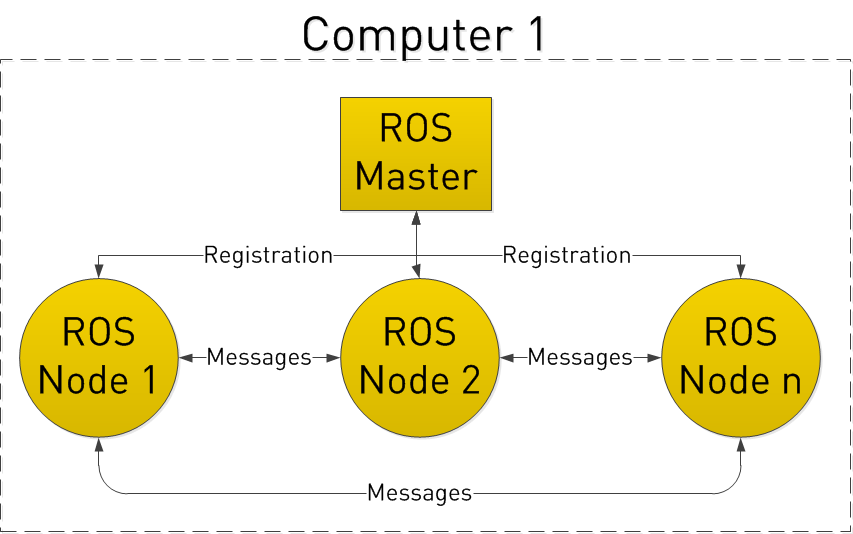
ROS는 data를 처리하는 peer-to-peer(P2P) network에서 처리된다.가장 중요한 용어 Node, Master, Mesage, Topic, BagNode들은 computation을 수행하는 과정들이다. robotic system은 보통 많은 node들
2021년 6월 17일
2.자율주행을 위한 ROS 시작하기(2)

출처 : http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28python%29첫번째 줄은 Python script를 실행가능하게 해준다.두번째 줄은 Ros node를 사용하기 위함이고그 다음은 pub
2021년 6월 17일