2016년 웨이 리우의 논문에서 처음 제안되었다.
R-CNN에 비해 단일 단계 탐지기는 합성곱층에서 위치와 클래스를 한번에 예측한다.
물체 존재 확신도는 정답과 경계 박스의 중첩률을 계산해서 예측하며 50% 이상인 해당 영역에는 물체가 있을 확률이 높다고 판단한다.
YOLOv3 처리 과정
- B개의 경계 박스를 결정하는 좌표 : 경계 박스를 4개의 값을 가진 튜플(bx,by,bw,bn)로 정의한다.
- 물체 존재 확신도(p0) : 해당 이미지 조각에 물체가 포함되어 있을 확률이다. 물체 존재 확신도는 시그모이드 함수를 거쳐 0과 1 사이의 값을 변환되어 확률로 다뤄진다.
p0 = Pr(물체 포함) x 중첩률(예측,정답)- 물체의 클래스 분류 : 경계 박스에 물체가 포함되어잇다면 K개 클래스에 대해 물체가 해당 클래스에 속할 롹률을 계산한다.
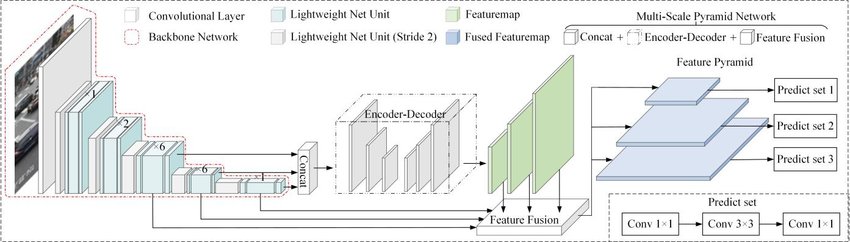
YOLOv3 구조
- 사물 탐지와 클래스 분류를 모두 수행하는 단일 신경망이며 GoogLeNet(인셉션)의 특징 추출기 부분을 참고했다. 인셉션 모듈 대신 1x1 축소층과 3x3 합성곱층을 조합한 구조를 사용하는데 이 구조를 다크넷(DrakNet)이라고 한다.
[참고자료]
https://www.hanbit.co.kr/store/books/look.php?p_code=B6566099029
