chapter8 딥러닝
8.1 더 깊은 신경망
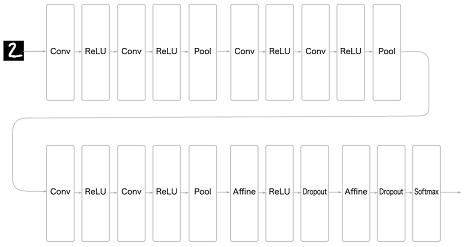
8.1.1 손글씨 숫자를 인식하는 심층 CNN
-
3*3의 작은 필터를 사용한 합성곱 계층(Conv)
-
활성화 함수(ReLU)
-
풀링 계층 추가해 중간 데이터의 공간 크기를 줄여나감
-
완전연결 계층 뒤에 드롭 아웃 계층 사용
- 완전 연결 신경망이란, 인접하는 계층의 모든 뉴런과 결합되어 있는 신경망을 말한다. 입력 데이터와 가중치가 1대 1로 대응하는 것을 완전 연결(Fully-Connected)이라고 하며, 행렬의 내적(Affine)으로 표현된다.- 드롭 아웃은 오버피팅(over-fit)을 막기 위한 방법으로 뉴럴 네트워크가 학습중일때, 랜덤하게 뉴런을 꺼서 학습을 방해함으로써, 학습이 학습용 데이타에 치우치는 현상을 막아준다. 일반적으로 CNN에서는 이 드롭아웃 레이어를 Fully connected network 뒤에 놓지만, 상황에 따라서는 max pooling 계층 뒤에 놓기도 한다.
-
가중치 매개변수 갱신(Adam을 사용해 최적화)
-
가중치 초기값: 'He' 초기값
(ReLU계의 활성화 함수 사용 시 He 초기화 방법이 효율적이다.)
8.1.2 데이터 확장(Data augmentation)
데이터 확장은 손쉬운 방법이면서도 정확도 개선에 아주 효과적이다.
입력 이미지(훈련 이미지)를 알고리즘을 동원해 '인위적'으로 확장한다.
(이미지의 개수를 늘린다.)
- 변형
-
회전에 의한 변형(rotate)
-
이동에 의한 변형(translation)
-
이미지 일부를 잘라낸다(crop)
-
좌우를 뒤집는다(flip)
- 이미지의 대칭성을 고려하지 않아도 되는 경우에만 쓸 수 있다.
-
크기수정(rescale)
-
밝기변화(lighting condition) 등
8.1.3 층을 깊게하는 이유
-
ILSVRC(ImageNet Large Scale Visual Recognition Challenge) 대규모 이미지 인식 대회에서 최근 상위를 차지한 기법 대부분은 딥러닝 기반이며 그 경향은 신경망을 더 깊게 만드는 방향으로 가고 있다.(층의 깊이에 비례해 정확도가 좋아진다.)
-
층을 깊게 한 신경망은 깊지 않은 경우보다 적은 매개변수로 같은(혹은 그 이상) 수준의 표현력을 달성할 수 있다.
예) 5*5의 합성곱 연산 1회는 3*3의 합성곱 연산을 2회 수행하여 대체할 수 있다.
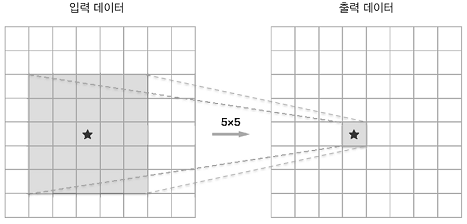
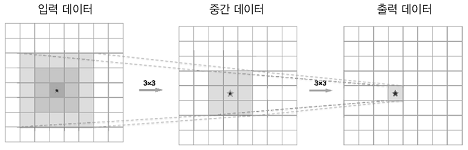
전자의 매개변수가 25개(5*5)인 반면 후자는 총 18개(2*3*3)이며 매개변수의 수는 층을 반복할수록 적어진다.
- 층을 깊게 함으로써 학습 데이터의 양을 줄여 학습을 고속으로 수행할 수 있다.
(신경망을 깊게 하면 학습해야 할 문제를 계층적으로 분해할 수 있다.
즉, 각 층이 학습해야 할 문제를 더 단순한 문제로 대체할 수 있다.)
8.2 대표적인 신경망
8.2.1 VGG
합성곱 계층과 풀링 계층으로 구성되는 기본적인 CNN
비중 있는 층(합성곱 계층, 완전연결 계층)을 모두 16층(혹은 19층)으로 심화함.
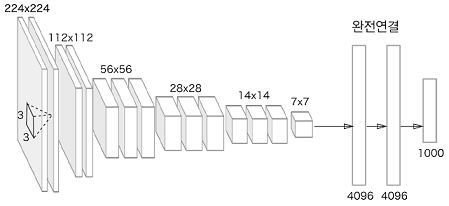
3*3의 작은 필터를 사용한 합성곱 계층을 연속으로 거친다.
합성곱 계층을 2~4회 연속으로 풀링 계층을 두어 크기를 절반으로 줄이는 처리를 반복하고 마지막에는 완전연결 계층을 통과시켜 결과를 출력한다.
8.2.2 GoogLeNet
기본적으로는 기존의 CNN과 다르지 않지만 세로 방향 깊이 뿐 아니라 가로 방향도 깊다는 점이 특징이다.
GoogLeNet에는 가로 방향에 폭이 있고 이를 인셉셥 구조라 한다.
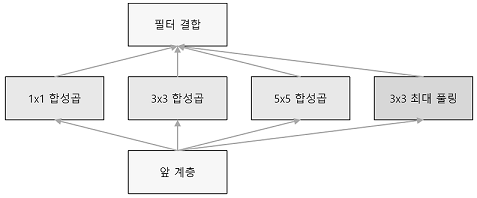
인셉션 구조는 크기가 다른 필터(와 풀링)을 여러 개 적용하여 그 결과를 결합하는데 GoogLeNet은 이 인셉션 구조를 하나의 빌딩 블록(구성요소)으로 사용한다.
또한 11크기의 필터를 사용한 합성곱 계층을 많은 곳에서 사용한다. (1 1의 합성곱 연산은 채널 쪽으로 크기를 줄이는 것으로 매개변수 제거와 고속 처리에 기여한다.)
8.2.3 ResNet(Residual Network)
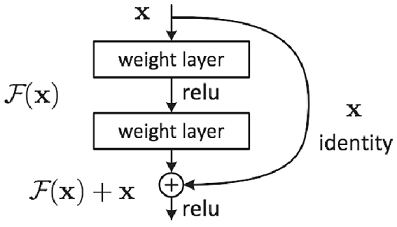
- 스킵연결(skip connection): 층의 깊이에 비례해 성능을 향상시킨다.
입력 데이터를 합성곱 계층(weight layer)을 건너뛰어 출력에 바로 더하는 구조
역전파 때 스킵 연결이 신호 감쇠를 막아주기 때문에 층이 깊어져도 학습을 효율적으로 할 수 있다.
8.3 딥러닝 고속화
- 계산 능력
- 딥러닝 프레임워크 대부분은 GPU(Graphics Processing Unit)를 활용해 대량의 연산을 고속으로 처리한다.
- GPU는 병렬 수치 연산을 고속으로 처리할 수 있다.
- 딥러닝 계산을 더욱 고속화하고자 다수의 GPU와 기기로 계산을 분산한다.
(딥러닝 학습의 수평 확장(scale out) 즉, 분산학습) - 다수의 GPU와 컴퓨터를 이용한 분산 학습을 지원한 딥러닝 프레임워크의 예
- 구글-텐서플로
- 마이크로소프트-CNTK(Computational Network Toolkit)
-
메모리 용량
대량의 가중치 매개변수와 중간 데이터를 메모리에 저장해야 한다. -
버스 대역폭
GPU(혹은 CPU)의 버스를 흐르는 데이터가 많아져 한계를 넘어서면 병목이 된다.
=> 2와 3의 문제점을 해결하기 위해서는 네트워크로 주고받는 데이터의 비트 수를 최소로 만드는 것이 바람직하다.
- 신경망의 견고성: 딥러닝은 높은 수치 정밀도(수치를 몇 비트로 표현하느냐)를 요구하지 않는다.
8.4 딥러닝의 활용
8.4.1 사물 검출
이미지 속에 담긴 사물의 위치와 종류(클래스)를 알아내는 기술
-
R-CNN(Regions with Convolutional Neural Network)
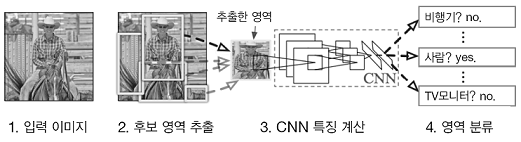
R-CNN 에서 주목할 곳은 2. 후보 영역 추출(사물처럼 보이는 물체를 찾아 처리) 과 3. CNN 특징 계산이다. 먼저 사물이 위치한 영역을 (어떤 방법으로) 찾아내고 추출한 각 영역에 CNN을 적용하여 클래스를 분류한다. -
R-CNN논문에서는 Selective Search 기법을 사용했다.
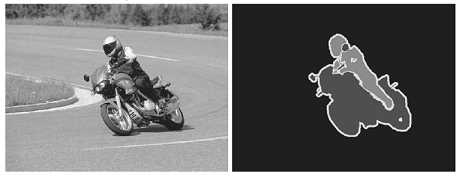
8.4.2 분할(segmentation)
이미지를 픽셀 수준에서 분류한다.
픽셀 단위로 객체마다 채색된 지도(supervised) 데이터를 사용해 학습한다.
- FCN(Fully Convolutional Network)
- 합성곱 계층만으로 구성된 네트워크.
- 단 한 번의 forward 처리로 모든 픽셀의 클래스를 분류해준다.
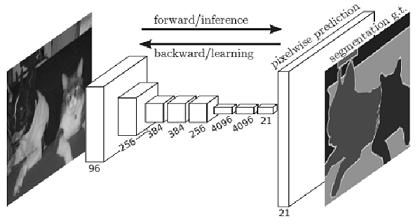
- 공간 볼륨을 유지한 채 마지막 출력까지 처리할 수 있다.
- 마지막에 공간 크기를 확대하는 처리를 도입했다.
(이를 통해 줄어든 중간 데이터를 입력 이미지와 같은 크기까지 단번에 확대할 수 있다. 이중 선형 보간(bilinear interpolation)에 의한 선형 확대)
8.4.3 사진 캡션 생성
-
NIC(Neural Image Caption): 심층 CNN과 자연어를 다루는 순환신경망(Recurrent Neural Network)으로 구성된다.
-
RNN: 순환적 관계를 갖는 신경망으로 자연어나 시계열 데이터 등의 연속된 데이터를 다룰 때 많이 활용한다.
-
멀티모달 처리(multimodal processing): 사진이나 자연어와 같은 여러 종류의 정보를 조합하고 처리하는 것
8.5 딥러닝의 미래
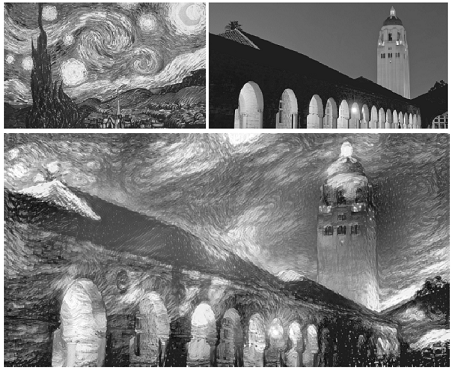
8.5.1 이미지 스타일(화풍) 변환
두 이미지(콘텐츠 이미지, 스타일 이미지)를 입력해서 새로운 그림을 생성하는 연구
논문
네트워크의 중간 데이터가 콘텐츠 이미지의 중간 데이터와 비슷해지도록 학습한다.
스타일 이미지의 화풍을 흡수하기 위해 스타일 행렬이라는 개념을 도입하고 스타일 행렬의 오차를 줄이도록 학습한다.
8.5.2 이미지 생성
- DCGAN(Deep Convolutional Generative Adversarial Network)
- 이미지를 생성하는 과정을 모델화한다.
- 생성자(generator)와 식별자(discriminator)로 불리는 2개의 신경망을 이용한다.
- 생성자 는 진짜와 똑같은 이미지를 생성하고 식별자 는 그것이 진짜인지(생성 이미지인지, 촬영된 이미지인지)를 판정한다. 생성자와 식별자가 겨루도록 학습시켜 최종적으로 생성자는 진짜와 착각할 정도의 이미지를 그려낸다.
8.5.3 자율 주행
안전한 주행 영역을 올바로 인식(주위 환경 인식)
- SegNet : CNN 기반 신경망. 입력 이미지를 분할(픽셀 수준에서 판정)한다.

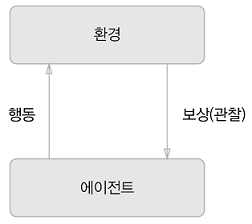
8.5.4 Deep Q-Network(DQN, 강화학습)
강화학습에서는 에이전트가 환경에 맞게 행동을 선택하고 그 행동에 의해서 환경이 변한다는 게 기본적인 틀이다. 환경이 변화하면 에이전트는 어떠한 보상을 얻는데 강화학습의 목적은 더 나은 보상을 받는 쪽으로 에이전트의 행동 지침을 바로잡는 것이다.
최적 행동 가치 함수로 최적인 행동을 정하는 Q학습이라는 강화학습 알고리즘을 기초로 한다. 최적 행동 가치 함수를 딥러닝(CNN)으로 비슷하게 흉내 내어 사용하는 것
참고: https://kolikim.tistory.com/53 [Broccoli's House]
참고: https://bcho.tistory.com/1149 [조대협의 블로그]

책 내용 정리하는데 정말 도움이 많이 되었습니다. 감사합니다 (_ _)