0️⃣ 들어가며
Qt 프로젝트가 끝나고 본격적인 임베디드 시스템 과정이 시작되었다.
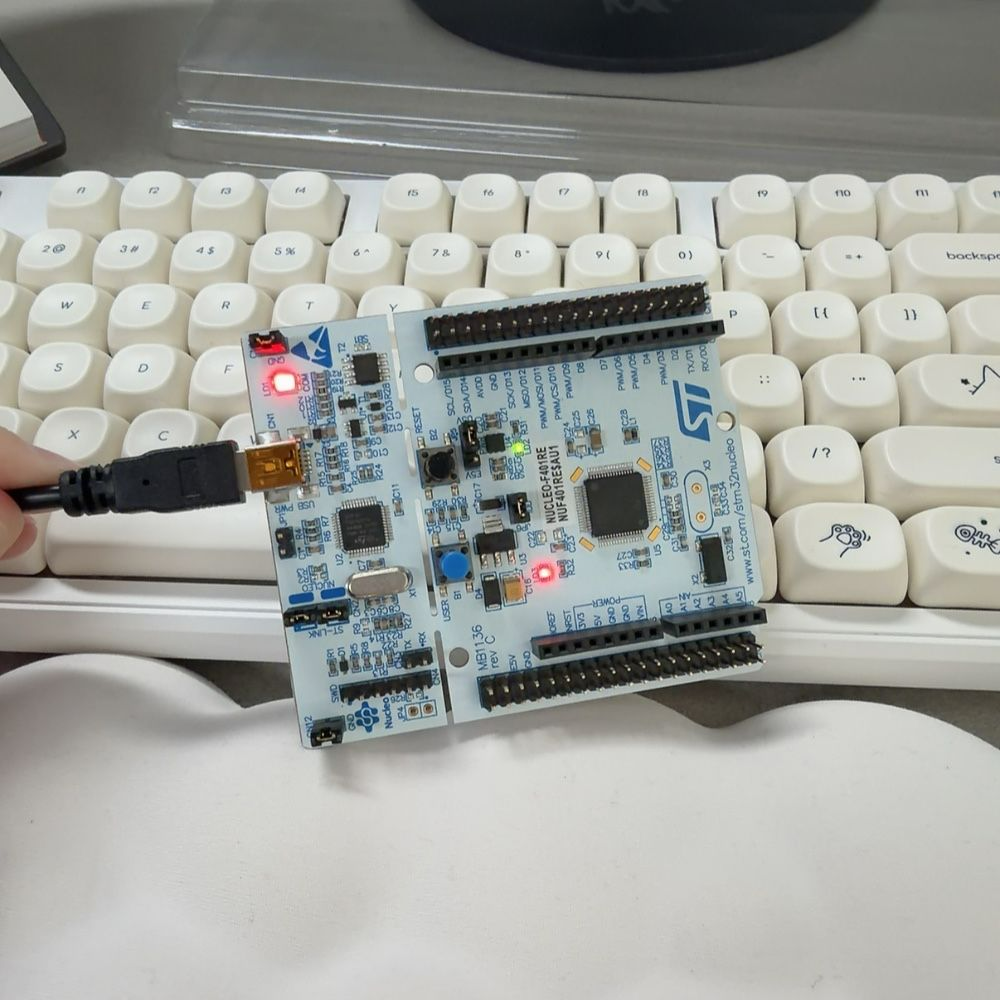
라즈베리파이4 키트랑 STM32 보드를 받았다.
오늘은 임베디드 시스템의 이해와 기초 개념에 관해 다루어 볼 예정이다.
1️⃣ 학습 내용
임베디드 시스템 아키텍처 개요
-
보드 발전 흐름
Embedded 보드 → Micro Controller Unit (MCU, 32bit) → System on Chip (SoC, 64bit)
MCU는 32비트 기반의 단일 칩 제어기, SoC는 여러 기능을 하나의 칩에 통합한 고성능 칩
-
프로세서 아키텍처 종류와 용도
-
x86 / i386, x86-64 / i586
주로 PC용 아키텍처
네트워크 장비 등 일부 임베디드 기기에서도 사용됨
-
ARM
소비자 시장 모바일 디바이스(스마트폰), 가전제품(냉장고 등)에 많이 채택됨
국내보다는 중국 등 해외 시장에서 우세
-
PPC (PowerPC)
PC용으로 사용되기도 하지만, 주로 임베디드 시장(네트워크, 항공우주, 방위산업, 산업용, 의료, 게임)에 집중
미국과 유럽에서 많이 채택
-
MIPS
PC → 네트워크 → 휴대폰 등 다양한 임베디드 분야로 확장
-
TriCore
자동차용을 타깃으로 개발되었으나 ARM 아키텍처에 점차 밀리는 추세
-
-
SoC와 MCU 구성 요소
SoC는 MCU를 포함한 전체 시스템이 하나의 칩에 집적된 형태
-
MCU (ARM 계열) 예시
32bit: STM32F401RE (Nucleo 보드)
64bit: BCM7112 (Raspberry Pi 4b+)
-
주요 구성
Core: 프로세서 코어(명령어 처리)
ROM: 프로그램 저장용 비휘발성 메모리
RAM: 데이터 임시 저장용 메모리
Devices/Peripherals: 주변 장치(타이머, ADC, UART 등)
-
임베디드 시스템 기본 개념
-
임베디드 시스템 정의
특수한 기능을 수행하도록 설계된 컴퓨터 시스템 (Dedicated function)
일반적인 PC와는 달리, 내장된 하드웨어와 소프트웨어가 결합되어 한 가지 특정 목적만을 수행
대형 기계나 전자 장치의 일부로서 탑재되며, 시스템 전체의 핵심 기능을 담당하기도 함
-
임베디드란?
임베디드(embedded)는 더 큰 시스템의 일부로 내장되는 것
한 기기 안에 여러 개의 임베디드 시스템이 존재할 수 있음
PC(general-purpose computer)는 여러 프로그램 설치가 가능하지만, 임베디드 시스템은 정해진 역할만 수행
-
임베디드 시스템의 특징
특정 기능에 맞춰 하드웨어와 소프트웨어가 최적화되어 있음
하드웨어 변경이 어렵고, 자원의 제약(메모리/연산능력/전력 등)이 적용
전력소비가 적고, 고신뢰성/실시간성이 요구됨
다양한 응용 분야: 휴대폰, 자동차, 우주항공, 자동화, 게임기, 디지털 가전, 네트워크 장비 등
입력(센서 등) → 프로세서(처리) ↔ 메모리 → 출력(모터, 화면 등) 구조를 가짐.
-
임베디드 시스템의 발전
과거: 간단한 산업용/가정용 컨트롤러 중심
현재: 군사, 디지털 가전, 자동 센서 시스템 등 첨단 분야까지 확장
미래: 엣지 디바이스 → 엣지 노드 → 클라우드로 진화
임베디드 시스템의 구조, 연산, 소프트웨어
-
임베디드 시스템 개발 프로세스 예
[요구분석] → [설계] → [HW/SW 개발] → [통합 테스팅] → [평가 인수] → [유지보수] → [생산 판매] ├ 인터페이스 └ 응용SW -
임베디드 시스템 설계 및 구현 과정
System Goal ↓ ┌─────────┴─────────┐ │ │ Hardware Software ├ Peripherals ├ Program Memory (SoC) └ ... ├ Data Memory └ I/O Interface -
임베디드 시스템 하드웨어 구성
Memory(ROM/RAM) ↓↑ 입력(센서/키보드/네트워크) → [Processor] → 출력(LED/LCD/네트워크) -
마이크로 컴퓨터, CPU 및 연산 유닛
인텔 칩셋(4004, 8008, 8086 등)처럼 연산, 제어를 담당하는 장치로 발전
ALU(정수 연산), FPU(부동소수점 연산), SIMD(동시 다중 데이터 연산) 등으로 분화
FPU/SIMD/GPU 등은 멀티미디어, 신호 처리, 병렬 연산에 필수적
-
CPU Operating Mode
USR (User Mode) : 일반 애플리케이션이 실행되는 모드
SVC (Supervisor Mode) : 커널 모드 또는 운영체제 모드로, 하드웨어와 직접 상호작용하며 시스템 자원 관리 수행
HYP (Hypervisor Mode) : 고차원 가상화 계층 모드로, 여러 운영체제를 동시에 실행시키는 가상 머신 관리 기능 수행
Ring, Kernel : 권한 수준을 나타내며, Ring 0은 커널(최고 권한), 사용자 영역은 Ring 3 등으로 구분
-
SMP와 AMP 멀티코어 구조
-
SMP (Symmetric Multi-Processing)
모든 코어가 동일한 OS를 공유하며 대칭적으로 작업 수행
[Core 1][Core 2]...[Core N] ↓ 단일 OS (Nucleus SMP) ↓ Thread 1...Thread M예: Multicore Processor (Core 1..N) → Nucleus SMP → Middleware → Application Thread (1..M)
-
AMP (Asymmetric Multi-Processing)
각 코어가 독립적으로 OS를 실행하며 특정 역할 분담
[Core 1] [Core 2] [Core N] ↓ ↓ ↓ Android Linux Nucleus ↓ ↓ ↓ App 1 App 2 App 3 (UI) (제어)예: Multicore Processor (Core 1..N)
Core1: Android + Middleware + App1(UI)
Core2: Linux + Nucleus RTOS + App2(Control)
코어별로 Windows, RTOS 등을 나눠 UI와 제어 처리 가능
-
-
FPU와 SIMD
ALU (Arithmetic Logic Unit) : 정수 연산 전담
FPU (Floating Point Unit) : 실수 연산 전담, 고비용 자원
SIMD (Single Instruction Multiple Data) : 여러 데이터를 동시에 처리하는 병렬 처리 방식
GPU 연산에 사용, 복소수 연산 시 실수부와 허수부 각기 계산
예: coordinate(x, y, z), color(r, g, b, a) 등의 벡터 데이터 처리에 적합
VFPU (Vector Floating Point Unit) : ARM 코어의 벡터 실수 연산 가속기
-
SIMD programming
ARM 메인 프로세서는 CP1부터 CP15까지 여러 코프로세서(Coprocessor)를 가짐
-
코프로세서(Coprocessor)
프로세서 핵심 연산 이외에 특수 연산(예: 부동소수점, 벡터 연산)을 담당하는 하드웨어 모듈
SIMD 확장 명령어 집합을 이용하여 벡터 연산 효율 극대화
-
-
GPU Computing
연산 집약적인 작업(그래픽, 과학 계산 등)을 GPU로 분산 처리
나머지 제어 및 일반 연산은 CPU가 담당하는 가속 컴퓨팅 방식
-
NAND Memory
비휘발성 저장용 메모리로, 임베디드 시스템의 데이터 저장에 광범위하게 사용됨
-
임베디드 시스템 소프트웨어 구성
하드웨어: 프로세서, 메모리, 입출력(I/O) 장치
소프트웨어: OS(리눅스, RTOS 등), 하이퍼바이저, VM, 애플리케이션 등으로 구성
개발 환경: Host(개발 PC), Target(임베디드 보드), Toolchain(컴파일러 등 툴), IDE, 디버거 등 필요
실시간 시스템
-
실시간 시스템(Real-Time System)
정해진 시간 내 반드시 또는 가급적 작업을 완료해야 하는 결정적(deterministic) 시스템
정해진 시간에 작업 수행이 보장되는 것, 외부 이벤트를 일정한 시간 내에 처리해야 하는 시스템
작업 완료 기준 : 일정 시간 내에 작업 완료, 작업 시작 기준 : 일정 시간 내에 작업 시작
요구하는 시간 내 작업 완료 여부에 따라 경성(hard), 연성(soft) 실시간 시스템으로 구분
-
경성(hard) 실시간 시스템
시간 제약의 위반이 심각한 결과를 초래, 시간 제약은 반드시 지켜져야 함
(예: 무기 체계 시스템, 발전 제어 시스템)
-
연성(soft) 실시간 시스템
시간 제약의 위반이 QoS(서비스 품질)의 저하를 유발, 시간 제약은 가급적 지켜져야 함
(예: 오디오, 통신기기)
-
실시간 시스템을 구현하기 위해 필요한 요소
-
하드웨어 (HW)
빠르고 예측 가능한 반응 속도를 보장할 수 있는 프로세서 및 주변 장치
인터럽트 처리, 타이머 등 실시간 이벤트 관리 기능 포함
메모리 및 입출력 장치의 신뢰성과 속도 보장
-
운영체제 (OS)
실시간 운영체제 (RTOS)
우선순위 기반 스케줄링으로 태스크의 실행 시점을 엄격히 제어
대표 예: FreeRTOS, vxWorks, QNX, ThreadX 등
RTOS는 멀티태스킹, 동기화, 인터럽트 응답, 타이밍 제어 기능이 뛰어남
커널이 경량화되어 예측 가능한 시간 내에 태스크 전환과 인터럽트 처리를 수행
-
애플리케이션 (App)
실시간 요구 사항에 맞춰 설계 및 구현
타이밍 제약을 준수하는 이벤트 처리, 응답 속도 개선
리소스 최소화 및 오류 처리 강화로 안정성 확보
-
-
실시간 운영체제 (RTOS)의 특징
-
우선순위 기반 스케줄링
가장 높은 우선순위 태스크가 CPU 사용권을 받음
-
선점형 스케줄링
우선순위가 높은 태스크가 언제든 실행 중인 태스크를 중단 가능
-
최소한의 지연 시간
태스크 응답 시간과 처리 지연을 극소화하여 실시간 동작 실현
-
동기화 및 통신 메커니즘
세마포어, 뮤텍스, 메시지 큐를 통해 태스크 간 안전한 데이터 공유 가능
-
실시간 타이머 및 이벤트 관리
정확한 시간 제어와 이벤트 기반 처리 지원
-
-
-
임베디드 리눅스 및 RTOS
GPL 라이선스 기반 리눅스 커널, 포팅 및 디바이스 드라이버 작성 필수
대표적 RTOS: FreeRTOS, vxWorks, QNX 등
CFS(Completely Fair Scheduler), RT(Real-Time), DEADLINE 기반 스케줄링
-
리눅스 운영체제 다운로드
임베디드 시스템 개발 환경
-
PC용 Application 개발 환경 vs Embedded System 개발 환경
PC용 앱은 일반적으로 동일한 HW, OS 환경(Windows, Linux 등)에서 개발/실행함
임베디드 앱 개발은 다양한 아키텍처, 커스텀 보드 등 특수 환경에서 동작
런타임 환경(HW, OS, 부트로더, 메모리 등)에 대한 이해가 필수적
-
임베디드 소프트웨어 개발 환경의 구성 요소
-
호스트 시스템(Host System)
실제 개발을 진행하는 PC (윈도우 또는 리눅스)
코드를 작성하고, 컴파일·링크·디버깅 등 필요한 툴을 실행하는 환경
-
툴체인(Toolchain)
소스코드를 타겟용 실행파일로 만드는 소프트웨어 도구 집합 (C/C++ 컴파일러, 어셈블러, 링커 등)
예: GNU ARM Toolchain, Keil uVision, IAR Embedded Workbench 등
-
디버거(Debugger)
작성한 프로그램을 타겟 보드에서 분석/수정/테스트하는 도구 (JTAG, Trace32 등)
-
타겟 시스템(Target System)
실제 소프트웨어가 동작할 임베디드 하드웨어 보드
-
-
Toolchain을 사용한 임베디드 실행 파일 생성 과정
-
컴파일
.h(헤더), .c(소스) → 전처리·컴파일러 → .s(어셈블리)
헤더파일은 전처리 과정을 통해 소스에 포함됨
-
어셈블(Assemble)
.s → 어셈블러 → .o(오브젝트 파일)
-
링크(Link, Locate)
.o, .a(라이브러리) → 링커 → .out(리눅스), .exe(윈도우)
-
이미지 변환 및 다운로드
objcopy로 .out(ELF) → .bin(binary file)로 변환
bin2hex로 .bin → .hex(ROM writer가 인식 가능한 형태)
.hex 파일을 ROM writer로 플래시에 기록
-
-
CubeMX, Keil uVision 등 개발 툴
-
STM32CubeMX
MCU 보드 핀, 시스템 클럭 등 초기화 설정을 GUI로 설계해 코드(.c) 자동생성
-
Keil uVision
CubeMX가 자동생성한 프로젝트(코드)를 불러와 빌드/디버깅 및 프로젝트 관리 진행
-
2️⃣ 실습 코드
USER 스위치를 누르면 LD2가 켜지게 된다.
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// 스위치를 누르면 LED가 켜지는 코드
if (HAL_GPIO_ReadPin(GPIOC, GPIO_PIN_13) == 0)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); // LED ON
}
else
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET); // LED OFF
}
HAL_Delay(100);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
3️⃣ 느낀 점
C랑 C++할 때는 아는 맛이었는데, 임베디드 기초로 넘어오니까 갑자기 전부 모르는 맛이 됐다.
개념 정리를 하긴 했으나 정말 기초적인 부분이라, 보드를 다루어 보면서 더 많이 배워야 할 것 같다.
이제부터는 STM32Cube로 프로젝트를 생성하고, Keil uVision에서 코드를 짜게 될 것..!
정말,,, 공부의 세계는 끝이 없구나,,,

라즈베리파이4 귀엽다 🍓
