0️⃣ 들어가며
드라이버의 개요 두 번째 편이다.
모듈은 드라이버를 담아 주는 개념이라고 생각하면 된다.
이번 글에서는 커널과 모듈의 빌드부터 시작해서
모듈의 틀을 만들어 보는 내용까지가 들어 있다.
1️⃣ 학습 내용
1.7 커널 빌드 및 설정 프로세스
✅ 빌드 프로세스의 비교
-
Application / Kernel 빌드 과정의 비교
단계 Application Build Kernel Build Fetch FTP, GitHub 등에서 소스 다운로드 linux-6.1.21.tar.gz다운로드 (kernel.org)Unpack tar -xvf ...압축 해제tar -xvf ...압축 해제Patch 필요 시 패치 파일 적용 벤더(Vendor) 패치 적용 등 Configure ./configure(환경 자동 감지)make menuconfig(수동/상세 설정 필수), 타겟 보드에 맞는 드라이버/옵션 선택Compile make(오브젝트 생성)make(커널 이미지 및 모듈 생성)Link 라이브러리 링크 vmlinux생성 (Static Linking)Install make install(/usr/bin등 복사)modules_install,headers_install, 이미지 복사
✅ 커널 설정(Kernel Configuration)
-
커널 설정의 개요
커널 빌드 전 어떤 기능을 포함할지 결정하는 단계
-
필수 패키지 설치
root@host:~/linux-6.1.21# apt install libncurses-dev flex bison -
설정 도구 실행
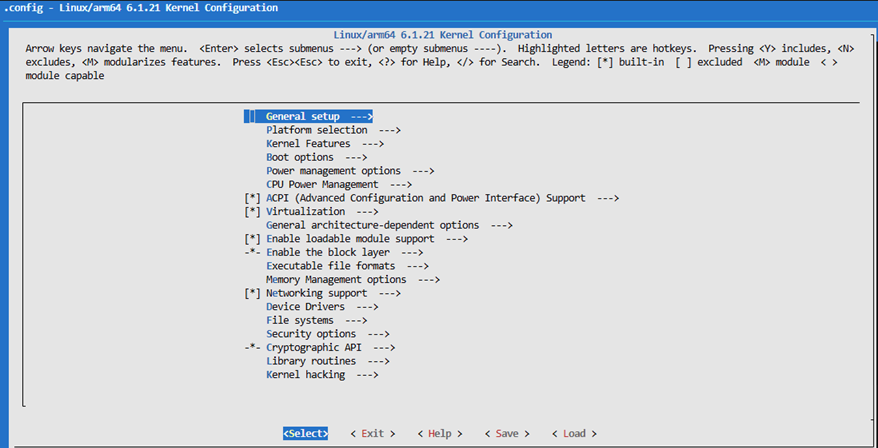
# make menuconfig명령어를 사용메뉴 파일(Kconfig)를 불러들여 메뉴를 표시하고, 터미널 기반의 GUI 메뉴로 옵션 선택
root@host:~/linux-6.1.21# export KERNEL=kernel8 root@host:~/linux-6.1.21# export ARCH=arm64 root@host:~/linux-6.1.21# make menuconfig-
참고 이미지
-
-
옵션 선택
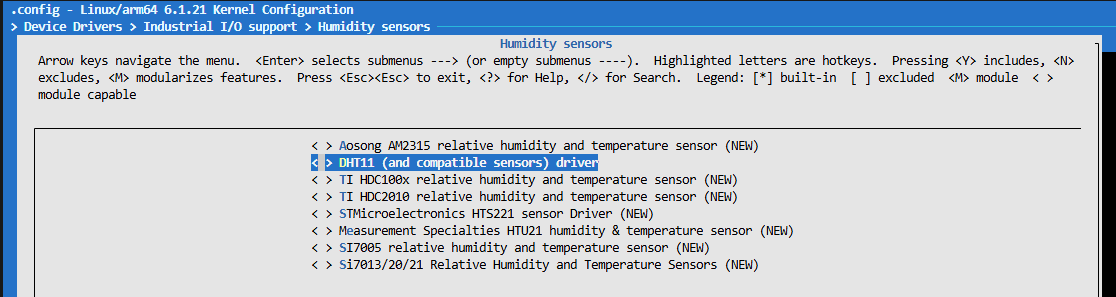
<*>(Built-in) : 커널 이미지(zImage)에 영구적으로 포함<M>(Module) : 별도의 모듈 파일(.ko)로 빌드되어 필요 시 로딩< >(Excluded) : 빌드에서 제외
-
설정 파일 관리 (
.config)menuconfig에서 설정한 내용은.config파일에 저장됨설정 파일 재활용을 위해 미리 만들어둔 설정 파일인
_defconfig를 이용 (위치 :arch/arm64/configs/).config를 저장하거나 불러와 이전에 지정했던 상태로 세팅 가능root@host:~/linux-6.1.21# export ARCH=arm root@host:~/linux-6.1.21# make bcm2835_defconfig HOSTCC scripts/kconfig/conf.o HOSTLD scripts/kconfig/conf # # configuration written to .config # # 이 명령은 구형 설정이므로 RPi 4 64bit 환경에는 부적합
✅ Kbuild System과 Makefile 동작 원리
-
KConfig (Kernel Configuration)
커널의 기능과 드라이버 옵션을 정의하는 설정 명세 파일
# make menuconfig를 실행했을 때 보여지는 메뉴 구조와 옵션의 타입, 의존성 등을 결정사용자가 선택한 값은
.config파일에CONFIG_XXX=y또는m형태로 저장
-
Kbuild (Kernel Build System)
리눅스 커널을 빌드하기 위한 규칙과 스크립트 체계
.config에 저장된 설정값(CONFIG_XXX)을 참조하여Makefile을 제어함-
핵심 규칙
obj-y: 커널 이미지(zImage)에 포함, Built-inobj-m: 모듈 파일(.ko)로 생성obj-(공백) : 빌드에서 제외
-
-
동작 예시 : DHT11 드라이버
-
.config파일 확인CONFIG_DHT11=m(모듈로 설정됨) -
Makefile확인:makefileobj-$(CONFIG_DHT11) += dht11.o # 위 변수가 'm'으로 치환되어 -> obj-m += dht11.o 가 됨 -
결과
obj-m으로 지정되어 있으므로dht11.ko파일 생성
-
✅ 커널 빌드와 결과물
- 커널 빌드하기 명령어
# make또는# make -jN를 실행하면 여러 파일들이 생성됨-
커널 이미지
vmlinux,zImage또는uImage또는bzImage를 생성 -
커널 모듈
.ko: 각 드라이버의 컴파일된 모듈 파일들 -
디바이스 트리 (Device Tree)
보드(MCU, RAM, ROM, Devices를 포함한 SoC)의 하드웨어 스펙을 커널에 알려주는 데이터 구조
-
소스 파일
.dts: Source, 사람이 읽을 수 있는 소스 파일로 C언어의.c와 유사.dtsi: Include, 공통 내용을 담은 헤더로 C언의.h와 유사
-
컴파일러
dtc: Device Tree Compiler 사용
-
실행 파일
.dtb: Blob, 컴파일된 바이너리로 커널이 읽는 파일.dtbo: Overlay, 런타임에 동적으로 적용하는 오버레이 바이너리
-
-
- 빌드 명령어
-
# make -jN멀티코어 상에서 빠른 빌드에 사용되는 명령어
(예 : 코어가 4개일 때
# make -j4)
-
# make zImage/# make uImage압축된 커널 이미지 혹은 U-Boot용 이미지를 생성할 때 사용하는 명령어
-
1.8 모듈 빌드와 실행
✅ 모듈 빌드 설정
-
모듈 빌드 과정
커널 소스/헤더 준비 → 빌드 환경 설정 → 빌드 → 설치
-
커널 소스/헤더 준비 (Build Environment)
-
Host 개발 (Cross Compile)
PC에서 빌드하여 타겟 보드로 옮기는 방식으로, 전체 커널 소스 필요 (예 :
/work/linux) -
Native 개발 (On Board)
라즈베리파이 등 보드에서 직접 빌드하는 방식
/lib/modules/$(uname -r)/build: 모듈 빌드에 필요한 최소한의 헤더가 링크된 경로
-
-
모듈 빌드 환경 설정 (
modules_prepare)호스트 개발 시 커널 소스를 다운로드 후 환경 설정이 필요함
모듈을 빌드하기 전에 기본적인 구성과 버전 체크 등을 수행
명령어 :
# make modules_prepare
-
모듈 빌드하기 (
# make modules)KDIR에 있는 커널의 Makefile 규칙을 빌려와서M디렉토리에 있는 소스 컴파일# -C: 커널 소스 경로로 이동 # M=: 현재 모듈 소스 경로를 알려줌 (구식 SUBDIRS 대신 사용) root@host:~/linux-6.1.21# make -C $(KDIR) M=$(PWD) modules -
모듈 설치하기 (
# make modules_install)설치된 모듈이 필요한 시점에 커널이 모듈을 찾아 로드할 수 있음
생성한
.ko모듈 파일을 시스템 표준 경로(/lib/modules/커널버전/)에 복사modules.dep파일을 갱신하여modprobe가 의존성을 파악할 수 있게 함INSTALL_MOD_PATH: Cross Compile 시에는 모듈 설치 위치를 지정해 주어야 함
✅ 모듈 로드와 로그 관리
-
modprobe: 스마트한 로더/lib/modules/경로를 참고하여 모듈과 의존성까지 자동으로 로드 및 제거
-
전통적인 명령어 : 수동 제어
# insmod file.ko: 현재 디렉토리의 파일을 커널에 로드, 의존성 해결은 하지 않음# lsmod: 현재 커널에 로드된 모듈 목록 확인# rmmod <name>: 모듈 언로드(제거)
-
커널 로깅(Logging)
printk()함수를 사용User Space의
printf에 대응되는 커널 함수커널 메시지 버퍼에 로그를 기록함
-
로그 보는 방법
/var/log/messages: 로그가 저장되어 있는 파일-
실시간 로그 확인
dmesg: 커널 부팅부터 현재까지의 로그 출력dmesg -c: 로그를 출력한 뒤 버퍼를 비워 정리, 테스트 반복 시 유용
-
✅ 모듈과 디바이스 드라이버의 차이
-
커널 모듈(Kernel Module)
리눅스 커널에 동적으로 적재되거나 제거할 수 있는 코드 덩어리
.ko파일로 만들어져 있으며, 디바이스 드라이버뿐만 아니라 커널의 기능을 확장하는 모든 코드
-
디바이스 드라이버(Device Driver)
특정 하드웨어를 제어하기 위해 만들어진 소프트웨어
하드웨어의 복잡한 동작을 감추고 커널이나 유저에게 표준화된 인터페이스를 제공
-
모듈과 드라이버의 관계
-
모듈로 만든 드라이버
필요할 때
insmod로 커널에 적재할 수 있는 드라이버개발과 배포가 유연한 편으로, 대부분의 드라이버가 이 방식을 사용함
-
모듈이 아닌 드라이버(Built-in)
make zImage할 때 커널에 포함되어 나오는 드라이버시스템 타이머 등 부팅에 필수적인 장치는 모듈로 만들 수 없음
-
드라이버가 아닌 모듈
방화벽, 파일시스템 등 하드웨어 제어와 상관없는 순수 소프트웨어 기능
-
✅ 모듈 빌드 예제
-
Makefile
# Makefile ifdef ARCH # Cross 빌드 KDIR=/work/linux else # Native 빌드 KDIR=/lib/modules/$(shell uname -r)/build endif all: dev # 커널 소스 디렉토리로 이동해서 Makefile을 실행, 빌드할 소스는 PWD에 있음 dev: $(MAKE) -C $(KDIR) M=$(PWD) modules clean: @$(MAKE) -C $(KDIR) M=$(PWD) clean -
모듈 빌드 예제 : work_drivers/exercise/03/01
1.9 모듈 만들기
✅ 모듈의 기본 구조와 헤더
-
모듈 담당 헤더
<linux/kernel.h>:printk등 커널의 기본 함수 포함<linux/module.h>: 모듈 관련 매크로와struct module이 정의된 파일-
struct module커널 내에서 모듈을 관리하기 위한 핵심 구조체
모듈의 상태, 모듈 리스트, 중복되지 않는 모듈명, 외부 참조 가능한 심볼 변수 테이블, 모듈 초기화/해제 함수 포인터, 모듈 코드와 데이터가 할당된 메모리 주소 등을 포함
-
-
모듈의 기본 형태
-
초기화 함수/해제 함수
모듈은 항상 초기화와 종료 함수 쌍으로 구성되며, 커널 매크로를 통해 등록됨
각각 모듈 로드 시와 모듈 제거 시에 실행됨
초기화 함수 예시 :
static int my_init(void);초기화 해제 함수 예시 :
static int my_exit(void);
-
등록 매크로
<linux/init.h>module_init(my_init): 커널에게 초기화 함수를 알림module_exit(my_exit): 커널에게 종료 함수를 알림
-
내부 호출 흐름
module_init -> __initcall(fn) -> device_initcall(fn) module_exit -> __exitcall(fn) -
Helper 매크로 (커널 3.x 이후)
module_platform_driver(my_driver): 플랫폼 드라이버용module_i2c_driver(...),module_spi_driver(...)
-
-
모듈 라이선스(Module License)
MODULE_LICENSE(): 모듈에 적용되는 라이선스 정책을 커널에 명시하는 매크로라이선스는 무조건 필요하고, 없으면 경고 메시지 발생 및 기능에 제약
예 : “GPL” 라이센스 명시하려면
MODULE_LICENSE(”GPL”)
✅ 모듈 빌드
-
인트리 빌드 (In-Tree Build)
커널 소스 트리 내부(
drivers/등)에 모듈 소스를 두고 커널과 함께 빌드하는 방식-
커널 소스 준비
빌드할 전체 커널 소스 필요
-
소스 위치
drivers/char/등 적절한 디렉토리에 드라이버 소스 파일(.c) 넣기 -
Makefile 수정
해당 디렉토리의 Makefile에 빌드 객체 추가하기
obj-m += xxx.o: 무조건 모듈로 빌드obj-$(CONFIG_XXX_POLE) += xxx.o: Kconfig 설정 옵션에 맞춰서 빌드 -
Make
커널 최상위에서
# make를 실행해 빌드하기CONFIG_가y면zImage에 포함되고,m이면xxx.ko파일이 생성됨
-
-
아웃오브트리 빌드 (Out-of-Tree)
커널 소스 트리가 아닌 외부(사용자 홈 디렉토리 등)에서 독립적으로 모듈을 빌드하는 방식
-
커널 소스 준비
빌드된 커널 헤더나 소스 필요
-
소스 위치
임의의 작업 디렉토리에 드라이버 소스 파일 넣기
-
Makefile 작성
obj-m := xxx.o # 단일 소스일 때 xxx-objs := xxx.o yyy.o # 여러 소스 파일로 하나의 모듈(xxx.ko)을 만들 때 -
Make
# make -C <KernelLocation> M=$(PWD) modules해당 디렉토리에서
make를 통해.ko파일 생성-C <KernelLocation>: 커널 소스 트리가 있는 위치 지정M=$(PWD): 드라이버 소스가 있는 곳을 현재 작업 디렉토리로 지정,SUBDIRS=$(PWD)와 같음
-
-
모듈 설치
# make modules_install: 빌드 후 명령을 통해 모듈 설치생성된
.ko파일들을 `/lib/modules/$(uname -r)/아래의 적절한 경로로 복사모듈 정의 파일인
modules.dep을 생성/갱신하여 모듈 리스트에 등록
✅ 모듈 출력
-
모듈의 메시지 출력 :
printk커널 모듈은 터미널(stdout)에 직접 출력이 불가능하므로 커널 메시지 버퍼에 기록
<linux/kernel.h>에 정의되어 있으며, 정확한 위치는/kernel/printk/printk.cprintf()와 사용법이 유사하지만 실수 출력을 위한 부동 소수점 포맷%f,%e를 지원하지 않음/var/log/messages등의 로그 파일에 내용 저장
-
출력된 로그 확인하기
# dmesg: Display Message, 실시간/전체 로그 확인 명령어# cat /var/log/messages: 파일을 통해 확인, root 권한 필요
-
로그 레벨(Log Level)
로그 레벨은 메시지의 중요도를 나타내는 레벨
숫자가 작을수록 우선 순위 높
이 레벨에 따라
printk는 콘솔에 즉시 내용을 출력할지, 버퍼에만 기록할지 결정printk의 로그 레벨보다 콘솔의 로그 레벨이 높아야 메시지 확인 가능-
로그 레벨 지정 방법
문자열 앞에 매크로 상수를 붙여 사용
예 :
printk(KERN_WARNING "Warning message\n");
-
-
로그 레벨 우선순위
매크로 상수 숫자 의미 KERN_EMERG<0>시스템이 동작 불가능한 상태 KERN_ALERT<1>즉각적인 조치가 필요한 상태 KERN_CRIT<2>치명적인(Critical) 오류 KERN_ERR<3>일반적인 오류 상태 KERN_WARNING<4>경고 메시지 KERN_NOTICE<5>정상이지만 중요한 알림 KERN_INFO<6>일반 정보 메시지 KERN_DEBUG<7>디버깅용 메시지 -
콘솔 출력 제어 (
/proc/sys/kernel/printk)커널은 현재 설정된 콘솔 로그 레벨보다 중요한 메시지만 콘솔 화면에 출력
cat /proc/sys/kernel/printk # 출력 예: 7 4 1 7 # (1) (2) (3) (4)-
Console Log level
현재 콘솔 출력 커트라인, 이 값보다 높은 우선순위 메시지(값이 작은 것)만 출력
-
Default Message Log Level
printk에 별도의 로그 레벨을 설정하지 않을 경우 적용되는 기본값 -
Minimum Console Log Level
Console Log Level을 이 값 이하로 내릴 수 없음
-
Default Console Log Level
Console Log Level의 부팅 시 기본값
- 콘솔 로그 레벨 변경
# 레벨을 8로 높여서 모든(0~7) 로그가 보이게 함 # ssh 터미널(pts)는 콘솔이 아니므로 이 설정과 무관하게 dmesg로 확인해야 함 # 직접 보려면 라즈베리파이에 모니터 연결 필요 echo 8 > /proc/sys/kernel/printk
-
-
모듈 출력 예제 /work_drivers/exercise/03/02
1.10 모듈 매크로와 매개변수
✅ 로깅을 위한 pr_ 매크로
-
pr_매크로커널 출력을 할 때
printk에 로그 레벨을 매번 입력하는 번거로움이 존재함이런 불편함을 줄이기 위해 Wrapper로 만든
pr_매크로 시리즈를 제공pr_info("Module loaded successfully\n");형태로 사용
-
pr_매크로의 장점로그 레벨이 매크로 이름에 포함되어 있어
KERN_INFO등의 상수를 쓰는 것보다 직관적, 가독성 향상로그 레벨을 수동으로 입력할 필요가 없어 오류 감소
현재 리눅스 커널 개발에서 권장되는 표준 로깅 방식
-
pr_매크로 종류매크로 함수 대응되는 printk레벨용도 및 의미 pr_emerg()KERN_EMERG시스템이 붕괴 직전인 긴급 상황 pr_alert()KERN_ALERT즉각적인 조치 필요 pr_crit()KERN_CRIT치명적인(Critical) 하드웨어/소프트웨어 오류 pr_err()KERN_ERR드라이버 동작 실패 등 복구 불가능한 에러 pr_warn()KERN_WARNING잠재적 문제 경고 (동작은 가능) pr_notice()KERN_NOTICE정상적이지만 중요한 알림 pr_info()KERN_INFO일반적인 정보 및 상태 메시지 pr_debug()KERN_DEBUG개발용 디버깅 로그 (기본적으로 출력 안 됨)
✅ 모듈 등록과 해제
-
모듈 등록/해제 매크로
-
module_init(func)모듈 로드(
insmod) 시 실행될 초기화 함수 등록
-
module_exit(func)모듈 제거(
rmmod) 시 실행될 종료 함수 등록
-
module_platform_driver(driver)플랫폼 드라이버를 개발할 때,
init/exit함수 등록 과정을 한 줄로 축약해 주는 편리한 매크로
-
-
모듈 라이선스 매크로와 모듈 정보
modinfo <filename.ko>: 모듈의 정보를 볼 수 있는 명령어MODULE_LICENSE("License"): 모듈에 적용되는 라이센스 명기MODULE_AUTHOR("Name"): 모듈 제작자의 이름(정보) 명기MODULT_DESCRIPTION("Desc"): 모듈 설명을 명기
-
모듈 라이선스 작성 예제 03/03
✅ 모듈 매개 변수 (Module Parameters)
-
모듈에 매개변수 전달하기
모듈을 로드할 때 상황에 맞는 매개변수를 전달받아 드라이버의 동작을 동적으로 변경하는 기능
하드웨어 설정값(NIC의 I/O 주소, IRQ값)을 하드코딩하지 않고 유연하게 설정할 수 있음
-
매개변수 전달 방법
모듈 로드 시 명령어 뒤에
변수명=값형태로 전달하고, 배열은 쉼표로 구분하여 지정# 단일 값 전달 insmod my_module.ko myint=100 mystring="Hello" # 배열 값 전달 insmod my_module.ko myarray=1,2,3 -
매개변수 전달 코드 구현
매개변수 전달을 위해서는
<linux/moduleparam.h>가 필요함먼저 전역 변수를 선언하고
module_param매크로로 연결module_param(name, type, perm): 기본 매크로module_param_array(name, type, &count_var, perm): 배열 매크로-
module_param전달 항목name: 매개변수로 사용할 변수 이름type: 변수의 데이터 타입&count_var: 실제로 입력된 개수를 저장할 변수의 주소 (없으면 NULL)perm: sysfs 접근 권한, 0644등의 일반적인 8진수 형식 또는 S_ifoo 정의를 OR 연산(예 :
S_IRUGO | S_IWUSR(0444 | 0644) : 모든 사용자는 읽기, 사용자는 쓰기 가능)
-
지원 데이터 타입
타입 이름 C 언어 타입 설명 byte, short, ushort char,short,unsigned short작은 정수형 int, uint int,unsigned int일반 정수형 long, ulong long,unsigned long큰 정수형 charp char *문자열 포인터 (String) bool, invbool bool불리언 (invbool은 값 반전) intarray int *정수 배열
-
-
매개변수 전달 예제 03/04
✅ 커널 심볼
-
커널 심볼 (Kernel Symbols)
커널 내부에서 다른 모듈이 접근할 수 있도록 공개된 함수나 변수
여러 드라이버에서 공통된 기능을 라이브러리처럼 재사용하거나 다른 커널 모듈이 특정 모듈의 함수나 변수를 써야할 때 유용
전역 심볼 테이블(
/proc/kallsyms) 파일에서 현재 커널에 등록된 모든 심볼 확인 가능
-
심볼 네임스페이스 (Symbol Namespace)
커널 심볼이 많아지면서 발생하는 이름 충돌 문제를 해결
모듈 간 종속성을 명확하게 구분하여 관리하기 위한 메커니즘
-
커널 심볼 내보내기
-
EXPORT_SYMBOL(symbol)심볼을 리눅스 커널의 전역 심볼 테이블에 등록하여 모든 모듈에서 사용 가능하게 함
라이선스 제약 없이 접근 가능
-
EXPORT_SYMBOL_GPL(symbol)GPL 라이선스 모듈만 접근을 허용하는 매크로
커널 내부 핵심 함수들은 대부분 이 매크로로 보호 처리됨
-
EXPORT_SYMBOL_NS(symbol, namespace)심볼을 특정 네임스페이스로 내보냄
사용하는 쪽에서
MODULE_IMPORT_NS(namespace)를 명시해야 접근 가능
-
2️⃣ 느낀 점
지쳤나요? 네.
드라이버의 세계는 정말 넓고 깊고 어렵구나
아직까지는 모듈의 틀만 만드는 수준이지만
다음 글부터는 좀 더 본격적인 내용이 나오게 될 것...!
