0️⃣ 들어가며
라즈베리파이와 리눅스 관련 3번째 글이다.
사실 배운 지는 한참 되었는데 정리할 내용이 엄청 밀려서
여기까지만 쓰고 당분간은 다른 내용의 포스팅을 해야 할 듯하다 😅
1️⃣ 학습 내용
4.5 리눅스 시스템 프로그래밍과 라즈베리 파이의 제어
✅ DHT11 센서
-
DHT11 센서
온도와 습도를 동시에 측정하는 디지털 센서
하나의 데이터 핀을 통해 40비트 데이터 프레임으로 변환된 값을 전송함
온도 0~50도, 습도 20~90% 사이의 값을 측정할 수 있음
-
DHT11 핀의 구조
DHT11 모듈은 3핀(VCC, DATA, GND) 또는 4핀(VCC, DATA, NC, GND) 형태로 제공
VCC는 3.3V 또는 5V, GND는 공통 접지, DATA는 라즈베리파이 GPIO와 연결
-
연결 예시
DHT11 VCC → 라즈베리파이 3.3V (예: 핀 1)
DHT11 GND → 라즈베리파이 GND 핀 (예: 핀 39)
DHT11 DATA → 라즈베리파이 GPIO 핀 하나 (예: GPIO4, 핀 7)
-
-
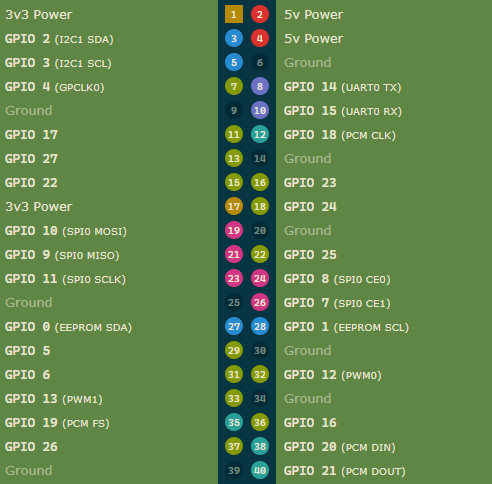
라즈베리 파이 물리적 사양 확인하기
터미널에
pinout입력하면 GPIO 핀 배치와 물리적 사양 확인 가능,--------------------------------. | oooooooooooooooooooo J8 +====== | 1ooooooooooooooooooo PoE | Net | Wi 1o +====== | Fi Pi Model 4B V1.5 oo | | ,----. +---+ +==== | |D| |SoC | |RAM| |USB3 | |S| | | | | +==== | |I| `----' +---+ | | |C| +==== | |S| |USB2 | pwr |hd| |hd| |I||A| +==== `-| |---|m0|---|m1|----|V|-------'https://pinout.xyz/ 에서 가독성 좋게 핀맵 확인할 수 있음
-
DHT11과 DHT22의 비교
센서 데이터 구조 (5바이트) 습도 형식 온도 형식 체크섬 계산 DHT11 {A, 0, B, 0, S} A (정수%) B (정수°C) A+B+0+0 DHT22 {A, a, B, b, S} A.a (소수%) B.b (소수°C) A+a+B+b -
예시
DHT11 : {50, 0, 25, 0, 75} → 습도 50%, 온도 25°C, 체크섬 50+0+25+0=75
DHT22 : {45, 5, 23, 7, 80} → 습도 45.5%, 온도 23.7°C, 체크섬 45+5+23+7=80
-
-
DHT11의 통신 방식 개요
DHT는 단일 와이어(Single-Wire)를 통해 MCU와 센서가 데이터를 주고받는 방식
단일 버스(Single-bus) 방식으로, 별도의 클럭 신호 없이 하나의 DATA 핀으로 데이터 전송과 동기화
센서는 MSB(최상위 비트)부터 순서대로 데이터 전송
데이터 크기는 총 40비트로 구성되며, 8비트씩 5개의 필드로 구성됨
각 필드는 정수부(integer)와 소수부(decimal)로 나뉘어 정확한 값을 표현
습도 정수 → 습도 소수 → 온도 정수 → 온도 소수 → 체크섬 순으로 전송
[8bit] 습도 정수(RH integral) + [8bit] 습도 소수(RH decimal) + [8bit] 온도 정수(T integral) + [8bit] 온도 소수(T decimal) + [8bit] 체크섬(check sum) -
DHT11 통신 과정
MCU(라즈베리파이)가 시작 신호를 보내면 센서가 깨어나서 40비트의 데이터로 응답
데이터 전송이 끝나면 다시 저전력 모드로 돌아가는 순환 구조
-
1단계: MCU 시작 신호 전송
라즈베리파이가 DATA 핀을 Low(0)로 18ms 이상 유지한 후 High(1)로 40us 정도 유지
이 신호를 받으면 DHT11이 저전력 대기 모드에서 작동 모드로 전환됨
-
2단계: DHT11 응답 신호
DHT11이 DATA 핀을 Low로 80us 유지 후 High로 80us 보내 ‘응답 완료’ 신호 전송
이 시점부터 40비트 데이터(습도+온도+체크섬)를 순서대로 전송
-
3단계: 데이터 수신 후 저전력 모드
40비트 전송이 끝나면 DHT11은 자동으로 DATA 핀을 High로 놓고 저전력 모드로 복귀
다음 읽기를 위해서는 MCU가 다시 시작 신호를 보내야 함
-
-
MCU의 시작 신호 전송
DATA 핀의 전압을 Low로 18ms 이상 유지한 후 High로 올려주는 간단한 과정
-
기본 상태
통신 시작 전 자유 상태
DATA 핀이 풀업 저항으로 인해 High(3.3V) 상태로 유지됨
-
1단계 - Low 신호 (최소 18ms)
MCU가 DATA 핀을 GPIO.LOW로 설정해 전압을 0V로 떨어뜨림
Low 구간이 18ms 이상 길어지면 DHT11이 ‘시작 신호’로 인식
-
2단계 - High 신호 (20-40us)
Low 후 바로 GPIO.HIGH로 전환해 핀을 다시 High로 만듦
이 High 상태에서 20~40마이크로초 대기하며 DHT11의 응답까지 기다림
-
-
DHT의 응답 신호
-
응답 시작 (80us Low)
시작 신호를 받은 DHT11이 DATA 핀을 Low로 80마이크로초 유지해 ‘응답 시작’을 알림
-
준비 신호 (80us High)
Low 후 High로 80us 유지하며 데이터 전송 준비 상태를 나타냄
이 시점부터 실제 40비트 데이터 전송이 시작됨
MCU는 Low 50us 후 High 펄스 길이를 측정해 비트를 판독
이때 40us 이상이면 '1', 미만이면 '0'으로 인식
-
데이터 비트의 전송 방식
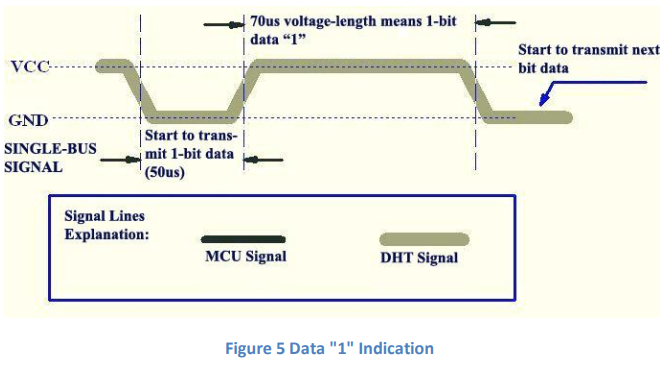
비트 시작: Low 50us (공통) 비트 끝 : High 길이로 0/1 구분 - '0' 비트: High 26~28us (짧음) - '1' 비트: High 70us (김)
-
-
GPIO 상태 모니터링
/home/raspberry/WiringPi를 빌드해서gpio를 설치하면 실시간 GPIO 상태 확인 가능터미널에
gpio readall입력-
주요 항목 설명
BCM : Python RPi, GPIO에서 사용하는 번호 (DHT11 pin=4)
wPi : WiringPi 전용 번호
Physical : 실제 물리핀 번호 (pinout.xyz와 동일)
Mode : IN/OUT/ALTx (ALT0=I2C 등)
V : 현재 전압 상태 (1=High, 0=Low)
+-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+ | | | 3.3v | | | 1 || 2 | | | 5v | | | | 2 | 8 | SDA.1 | ALT0 | 1 | 3 || 4 | | | 5v | | | | 3 | 9 | SCL.1 | ALT0 | 1 | 5 || 6 | | | 0v | | | | 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | ALT5 | TxD | 15 | 14 | | | | 0v | | | 9 || 10 | 1 | ALT5 | RxD | 16 | 15 | | 17 | 0 | GPIO. 0 | IN | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 | | 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | | | 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 | | | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 | | 10 | 12 | MOSI | ALT0 | 0 | 19 || 20 | | | 0v | | | | 9 | 13 | MISO | ALT0 | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 | | 11 | 14 | SCLK | ALT0 | 0 | 23 || 24 | 1 | OUT | CE0 | 10 | 8 | | | | 0v | | | 25 || 26 | 1 | OUT | CE1 | 11 | 7 | | 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 | | 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | | | 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 | | 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | | | 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 | | 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 | | | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 | +-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+ | BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM | +-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+
-
5. 프로세스와 스레드: 다중 처리
5.1 프로세스와 시그널
✅ 프로세스 기본 개념
- active / passive process
-
passive process (프로그램)
디스크에 저장된 실행 파일이나 스크립트처럼 아직 실행되지 않은 상태
(예 :
/bin/ls,a.out파일 자체)
-
active process (프로세스)
실행 파일이 메모리에 적재되고, CPU·메모리·파일 같은 자원을 할당받아 실제로 실행 중인 상태
보통 실행 중인 프로그램(program in execution)이라는 정의를 사용
-
- user process / kernel process
-
user process (사용자 프로세스)
일반 애플리케이션, 쉘, 서버 프로그램 등 사용자 코드가 사용자 모드에서 실행되는 프로세스
파일 열기, 네트워크, 메모리 할당처럼 특권이 필요한 작업은 시스템 콜을 통해 커널에 요청
각 user process는 자기만의 유저 주소 공간과 스택을 가짐
-
kernel process / kernel thread (커널 프로세스/스레드)
OS 내부 작업을 담당하는 커널 코드가 커널 모드에서 실행되는 실행 단위
보통 사용자 영역이 아니라 커널 전용 주소 공간에 있고, 다른 프로세스와 공유되는 형태
-
✅ 프로세스 관리의 종류
-
프로세스 관리
프로세스 생성(fork), 상태를 바꾸며 실행/대기/종료, 종료 후 정리를 포함하는 전체 메커니즘
프로세스가 가진 정보들은 프로세스 제어 블록(PCB,
task_struct)에 저장되어 관
-
프로세스의 내용
프로그램 코드 + 현재 활동 상태 : 텍스트 영역(명령어)와 현재 어디까지 실행했는지 정보
프로그램 카운터(PC) : 다음에 실행할 명령어 주소
레지스터 값 : 연산 중간 결과, 스택 포인터 등 CPU 레지스터들의 현재 값
스택(Stack) : 함수 호출/리턴, 지역 변수, 함수 인자 저장
전역 변수 영역(Data/BSS) : 프로세스 전체에서 공유되는 변수들
-
추상적인 프로세스 상태
생성(New) : 프로세스가 만들어짐
수행(Running) : CPU를 잡고 명령어를 실행 중
대기(Waiting/Blocked) : I/O, 이벤트, 시그널 등을 기다리며 잠든 상태
준비(Ready) : 실행할 준비는 되었지만 CPU를 아직 배정받지 못한 상태
종료(Terminated) : 실행을 마친 상태
-
리눅스의 프로세스 상태 (task_struct.state)
리눅스 커널의
include/linux/sched.h에서struct task_struct의state필드로 관리되는 상태-
TASK_RUNNING
실제로 CPU에서 실행 중이거나, 실행 대기(Ready) 큐에 올라와 있는 상태
-
TASK_INTERRUPTIBLE
어떤 조건(I/O 완료, 이벤트)을 기다리며 수면(sleep) 상태
시그널이 오면 깨울 수 있고, 조건이 만족되면 다시 TASK_RUNNING으로 전환
예 : 입력을 기다리는 프로세스
-
TASK_UNINTERRUPTIBLE
마찬가지로 sleep이지만, 시그널로는 깨지지 않음
커널이 명시적으로
wake_up()같은 메커니즘으로 깨워야 함중단되면 안 되는 I/O(디스크 블록 전송 등)에 사용
-
TASK_STOPPED / __TASK_STOPPED
SIGSTOP, 디버거(트레이스) 등에 의해 정지된 상태
-
TASK_ZOMBIE
프로세스가
exit()를 호출해 실행은 끝났지만, 부모가 아직wait()를 호출하지 않아task_struct가 남아 있는 상태프로세스 컨트롤 블록이 해제되지 않아 프로세스 테이블에 task_struct 정보가 남아 있는 상태
-
-
프로세스 상태 변경 흐름
-
생성
fork()호출 시 부모의 문맥을 복사해 자식 생성 → 새task_struct와 PID 부여 -
실행/대기 전환
CPU를 받으면 TASK_RUNNING → 실행
I/O 요청, sleep, wait 등으로 인해 TASK_INTERRUPTIBLE / TASK_UNINTERRUPTIBLE로 전환
이벤트 발생 또는 시그널/
wake_up()으로 다시 TASK_RUNNING -
종료 준비
exit(status)호출 → 리소스 회수, 상태 저장 → TASK_ZOMBIE로 전환 -
정리
부모가
wait(&status)를 호출하면 좀비 상태를 회수하고 PCB(task_struct) 제거 → 완전 종료
-
-
프로세스 생성 : fork / clone / copy_process
-
fork()부모 프로세스가 자신의 복사본을 만들어 자식 프로세스를 생성하는 표준 시스템 콜
자식은 부모의 주소 공간, 파일 디스크립터, 레지스터 값 등을 복사
반환값(PID)은 다르게 받음 (부모는 자식 PID, 자식은 0)
-
리눅스 내부 흐름
사용자 공간
fork()→ 커널의clone()시스템 콜 →_do_fork()→copy_process()호출copy_process()에서 새task_struct와 커널 스택 생성 (dup_task_struct())부모의 메모리/파일/시그널/스케줄링 정보 등을 자식에게 복사(또는 COW로 공유)
-
-
프로세스 동기화 : wait
wait(&status)은 부모 프로세스가 자식이 종료될 때까지 블록(block)되어 기다리는 시스템 콜자식이
exit(status)로 종료되면 커널은 자식 상태를 TASK_ZOMBIE로 두고, 부모에게SIGCHLD시그널 전달부모가
wait(&status)를 호출하면 종료 상태를 넘겨주고,task_struct를 완전히 제거wait를 호출하지 않는 경우 TASK_ZOMBIE 상태가 길게 유지
-
프로세스 종료 : exit
exit(status)은 자식 프로세스 정상 종료 시 호출하는 함수열린 파일, 메모리, 커널 자원을 회수하고 종료 코드와 정보를 PCB에 남김
TASK_ZOMBIE로 상태를 변경하고 부모에게
SIGCHLD시그널을 보내 종료되었음을 알림
✅ 문맥 교환과 문맥 저장 장소
-
문맥(Context)
실행 중인 프로세스의 순간의 스냅샷
프로세스를 다시 이어서 실행하는 데 필요한 모든 실행 상태 정보
-
사용자 측면 (User context)
사용자 주소 공간 : 코드/데이터/힙/스택 등 프로세스 메모리 이미지
-
레지스터 측면 (CPU context)
프로그램 카운터(PC), 스택 포인터(SP), 상태 레지스터(CPSR), 범용 레지스터 등 현재 CPU 레지스터 값
-
시스템 측면 (Kernel context)
프로세스 상태(state), PID/TGID, 스케줄링 정보, 페이지 테이블(mm_struct), 커널 스택, 열린 파일, 시그널, 우선순위 등
-
-
리눅스에서 문맥 저장 위치
task_struct
프로세스/스레드의 PCB 역할을 하는 핵심 구조체
PID, 상태, 스케줄링 정보, 메모리 매핑, 파일 디스크립터 등 거의 모든 관리 정보를 포함
-
프로세스 관련 쉘 명
ps -l,ps -el,ps -L: PID, PPID, UID, STAT(상태), PRI(우선순위) 등 출력top: 실시간 CPU/메모리 사용률 및 프로세스 상태 확인pstree: 부모-자식 관계를 트리 구조로 표시/proc/<pid>/status,/proc/<pid>/stat: 커널이 가진 task_struct 정보 일부를 텍스트로 노출 (State, PPid, Threads 등)cat /proc/1/status: PID 1(init/systemd)의 상태 확인-
작업 제어 관련
fg,bg: 포그라운드/백그라운드로 작업 전환(쉘이 시그널과 터미널 제어)Ctrl+C:SIGINT로 프로세스 강제 종료 요청Ctrl+Z:SIGTSTP로 프로세스 일시 정지(T 상태)
-
-
ps / /proc에서의 state 코드
-
R : Running / Runnable
실행 중이거나 run queue에 있어 언제든 실행될 수 있는 상태(TASK_RUNNING)
-
S : Sleeping
인터럽트 가능 수면, 일반적인 대기 상태(TASK_INTERRUPTIBLE)
-
D : Disk sleep (Uninterruptible sleep)
디스크 I/O 등으로 인한 인터럽트 불가능 수면 상태(TASK_UNINTERRUPTIBLE)
-
T : Traced / Stopped
SIGSTOP또는 디버거 ptrace에 의해 중단된 상태(TASK_STOPPED)
-
Z : Zombie
종료되었지만 부모가 회수하지 않아 남아 있는 좀비(TASK_ZOMBIE, PCB/task_struct만 남음)
-
I : Idle
커널의 유휴 스레드 등, 일부 시스템에서 사용
-
✅ 프로세스
-
프로세스 생성
-
bash의 명령에 의한 생성
bash가 먼저
fork()로 자신을 복사한 자식 프로세스를 생성자식이
exec()계열로 새로운 프로그램 이미지를 덮어쓰기
-
프로그램 내 함수에 의한 생성
C 코드에서 직접
fork()를 호출하여 자식을 생성필요하면 자식 프로세스에서
execl()로 다른 프로그램을 실행
-
-
프로세스 로드 함수
execl()은 현재 프로세스가 실행 중인 프로그램을 다른 프로그램으로 교체하는 함수이미 존재하는 프로세스 안에 다른 프로그램을 올리는 개념
현재 프로세스의 코드/데이터/스택/힙 등을 모두 새 프로그램으로 덮어 씀
-
프로세스 생성·대기·종료
-
fork()부모 프로세스를 기반으로 거의 똑같은 자식 프로세스를 생성하는 함수
스택(함수 호출 상태, 지역 변수)과 데이터/전역 변수 영역, 힙, 파일 디스크립터, 환경 변수 등은 복사되어 전달
코드(text) 영역은 읽기 전용이므로 공유해서 사용
부모는 반환값으로 자식의 PID를 받고, 자식은 0을 받음
-
exec계열execl, execv, execve 등의 함수
현재 프로세스의 메모리 공간을 다른 프로그램 코드로 교체
-
wait(&status)부모 프로세스가 자식 프로세스의 종료를 블록 상태로 기다리고 자식의 종료 코드 회수
wait를 호출해야 좀비 상태가 사라짐
-
exit(status)프로세스가 자신의 실행을 끝내고 종료 상태 코드를 커널에 전달
부모 프로세스는
wait()로 이 status를 받게
-
-
프로세스 라이프사이클
-
NEW
생성 중 (
fork()호출 직후) -
READY(Ready Queue)
준비 큐(READY-q)에 들어가 CPU를 기다림
Ready Queue는 보통 FIFO 큐(Queue 자료구조)로 구현
리눅스는 우선순위/스케줄링 정책별 여러 큐·트리로 관리
-
RUNNING (CPU)
스케줄러가 선택해 CPU에서 실행
-
SLEEP / WAIT (Wait Queue)
I/O 완료, 이벤트, 타이머 등을 기다리며 대기 (인터럽트 가능/불가능 WAIT-Q)
조건이 충족되면 다시 READY 큐로 이동
-
ZOMBIE
exit()로 실행은 끝났지만, 부모의wait()가 아직 호출되지 않아 PCB(task_struct)만 남은 상태
-
-
스케줄링 정책과 우선순위
-
동적 스케줄링
실행 중에 OS가 우선순위를 계속 조정하는 방식
오래 실행 중인 태스크는 불리하게, 반대의 경우는 유리하게 만듦
대표적으로 CFS가 있음
-
CFS(Completely Fair Scheduler)
“완전 공평”하게 CPU 시간을 나누는 것
각 태스크에 가상 실행 시간
vruntime을 유지
-
vruntime가상수행시간, 실제 실행 시간에 우선순위 가중치를 적용한 값
더 많이 실행된 태스크는
vruntime이 커지고, 덜 실행된 태스크는 작음vruntime이 가장 작은 프로세스부터 우선 실행
-
nice 값과 PRI
nice는 프로세스의 우선순위를 설정하는 명령어nice는 -20 ~ +19 사이의 값을 가지며, 음수 값을 주기 위해서는 관리자 권한 필요내부 우선순위는 보통
prio = nice + 숫자형식으로 맵핑됨nice가 낮을수록 우선순위가 높아짐
-
-
정적 스케줄링
우선순위를 한 번 정하면 실행 중에 변하지 않는 방식
커널은 고정된 priority 값만 보고 스케줄링
-
실시간 스케줄링 (RT: SCHED_FIFO, SCHED_RR)
우선순위가 높은 태스크가 CPU를 원할 때 마음껏 쓰는 구조
일반 CFS 태스크보다 항상 우선함
-
SCHED_FIFO (FIFO)
같은 우선순위 그룹 안에서는 먼저 READY가 된 태스크가 CPU를 선점당하지 않고 계속 사용
예: P1 먼저 준비되면 P1이 스스로 블록되거나 종료할 때까지 계속 실행, 그 뒤 P2 실행
-
SCHED_RR (Round Robin)
같은 우선순위 그룹 안에서 타임 슬라이스를 돌려가며 실행.
예: 타임 슬라이스 단위로
P1 → P2 → P1 → P2…
-
-
✅ 시그널
-
프로세스 / 태스크와 OS 종류
-
GPos (일반 목적 OS)
리눅스, 윈도우 등 PC·서버용 OS
실행 단위를 보통 process(프로세스)라고 부름
-
RTOS (Real-Time OS)
FreeRTOS, VxWorks, Zephyr 등 임베디드·실시간 장치용 OS
실행 단위를 task(태스크)라고 부르는 경우가 많음
-
-
IPC / ITC
Inter Process(Task) Communication
프로세스 또는 태스크(실행 엔티티) → 스케줄러 → CPU 점유
이때 프로세스/태스크 사이에서 데이터를 주고받는 기법
그 중 시그널은 알림용 메커니즘
-
시그널의 기본 개념
커널을 통해 프로세스에게 전달되는 비동기적 이벤트(시간차에 의한 처리)
터미널에
kill -l을 입력하면 지원되는 시그널 목록 확인 가능- 시그널의 역할
- 예외 처리 : 프로세스가 잘못된 동작을 했을 때 시스템이 프로세스의 동작을 제한
- 외부에서 동작 지시 : 다른 프로세스나 터미널 입력(
ctrl+c등)으로 동작 제한 - 자원 할당 예외
- 특정 이벤트 발생을 감지 : I/O 인터페이스에서 이벤트 발생을 통보
- 시그널의 종류
-
커널 → 프로세스
프로세스 예외 상황 시에 커널이 자동 발생시키는 시그널 (예:
SIGSEGV) -
프로세스 ↔ 프로세스 (IPC)
하나의 프로세스가 다른 프로세스에게 신호를 보냄 (예:
SIGUSR1/2) -
윈도우의 유사 개념 : message
리눅스의 시그널과 유사한 역할을 윈도우 메시지가 수행
-
- 시그널의 역할
-
동기/비동기의 개념
-
동기적(synchronous)
공통된 기준을 맞춰 같은 타이밍에 움직이는 것
예: 정해진 시간에 동시에 시작하는 작업
-
비동기적(asynchronous)
별도의 공통된 시계 없이 한 쪽이 이벤트를 던지고 다른 쪽이 그때그때 받는 방식
예: 공을 던지고 받기
-
-
하드웨어 통신에서의 동기/비동기 예시
-
UART (Universal Asynchronous Receiver-Transmitter)
비동기 직렬 통신
Clock 선을 공유하지 않고 각자 보드레이트만 맞춰 통신
상대적으로 간단하지만 동기식에 비해 속도나 정확도가 제한적
-
USART (Universal Synchronous/Asynchronous Receiver-Transmitter)
동기 모드를 지원하는 통신으로, Clock 선을 공유함
비동기식보다 같은 시간 동안 보낼 수 있는 데이터의 양이 더 많음
-
-
Exception(동기적 예외)
프로세스 자신의 명령어(instuction)에 의해 발생
PC 위치에서 언제 발생할지 정확히 알 수 있음
int *p = 0; // NULL 포인터 *p = 1; // 0번지에 쓰기 시도 → SIGSEGV (Segmentation fault); 어셈블리 STR r1, [r2] ; r1=1, r2=0 → MMU가 Data Abort Exception 발생 ↓ Exception Handler 호출 ↓ SIGSEGV 시그널 → 프로세스 종료PC → 문제 명령어 → Exception → Handler → 처리 후 복귀 또는 종료
-
Interrupt(비동기적 인터럽트)
외부(하드웨어 등)에서 발생
프로세스 실행 중 언제든 일어날 수 있어 예측이 불가능
i1 실행 ── i2 실행 ── i3 실행 ── 외부 인터럽트 발생 ↓ IRQ Handler 호출 ↓ 인터럽트 처리 ↓ i3 이어서 실행PC → IRQ Handler → 처리 → PC로 복귀
-
프로세스 간 동기화 (Synchronize)
프로세스/스레드들이 공유 자원을 안전하게 사용하기 위한 메커니즘
-
배타적 사용 (Mutual Exclusion)
한 번에 하나의 프로세스만 자원을 사용할 수 있음 (예: 화장실)
-
순서적 사용 (Ordering)
특정 순서대로 자원 사용 (예: 이어달리기)
-
-
시그널 보내기
-
bash에서
kill명령어 사용kill -SIGKILL 1234 # PID 1234에 SIGKILL 전송 -
프로그램에서
kill()시스템 콜#include <signal.h> #include <sys/types.h> int kill(pid_t pid, int sig); // 성공: 0, 실패: -1 int send_signal(int pid) { int ret = kill(pid, SIGKILL); // PID에 SIGKILL 전송 printf("ret: %d\n", ret); // 0=성공, -1=실패 return ret; }
-
-
시그널 기본 행동 종류
행동 의미 예시 시그널 Term 프로세스 종료 SIGTERM, SIGINT Ign 무시(ignore) SIGCHLD, SIGWINCH Core 종료 + 코어 덤프 생성 SIGSEGV, SIGFPE Stop 프로세스 정지 SIGSTOP, SIGTSTP SIGKILL과SIGSTOP은 핸들러로 가로채거나, block하거나, 무시할 수 없음
-
시그널의 전달 과정
발생 : 키보드,
kill명령, 하드웨어 예외로부터 시그널 발생커널 전달 : 현재 포그라운드 프로세스 그룹에 전달
인터럽트 : 실행 중인 프로세스가 작동 중이라면 인터럽트 → 유저 모드 복귀 시점에 시그널 확인
처리 : 사용자 시그널 핸들러를 실행하거나 기본 행동(Term
기본 행동이 없다면 프로세스 종료 요청/코어 덤프 생성
-
시그널 관련 API
-
signal()시그널 처리를 설정하는 간단한 함수
시그널 번호와 핸들러 지정 가능
#include <signal.h> typedef void (*sighandler_t)(int); sighandler_t signal(int signum, sighandler_t handler); -
sigaction()시그널 처리기를 설치하는 함수
시그널을 받았을 때 실행할 내용을 쌍·구조체를 사용하여 다양한 기능을 구현
#include <signal.h> int sigaction(int signum, const struct sigaction *act, struct sigaction *oldact); -
struct sigactionstruct sigaction { void (*sa_handler)(int); // 기본 핸들러 void (*sa_sigaction)(int, siginfo_t*, void*); // 상세 정보 핸들러 sigset_t sa_mask; // 핸들러 실행 중 블록할 시그널 집합 int sa_flags; // 동작 플래그 (SA_RESTART 등) void (*sa_restorer)(void); // 레거시 };
-
-
시그널 그룹
시그널 집합의 처리를 위한 구조체
typedef struct { unsigned long sig[_NSIG_WORDS]; } sigset_t; -
시그널 그룹 관리 API
시그널 집합인
sigset_t관리를 위한 함수들sigemptyset(&set); // 빈 집합 sigaddset(&set, SIGINT); // SIGINT 추가 sigdelset(&set, SIGUSR1); // SIGUSR1 제거 sigismember(&set, SIGINT); // 포함 여부 확인 (1/0)
2️⃣ 느낀 점
아무래도 제일 재미있었던 건 DHT11을 써서 했던 실습!
실제로 데이터가 들어오는 걸 눈으로 확인할 수 있어서 좋았다.
프로세스와 시그널은 사실 계속 쓰이는 개념이라 충분히 숙지하고 있어야 하지만
이번에 실습 과제를 하면서 보니 이론으로 보는 것과 제한된 시간 안에 코드에 적용하는 건 다르다는 걸 많이 느꼈다.
뒤에 남아 있는 관련 내용은 프로세스 간 통신, 네트워크 부분이고
당분간은 그 다음 내용인 드라이버에 관해 작성할 예정이다.
그리고 12월의 챌린저가 되었다!
킹메이커 여러분께 개큰감사를 🙇♀️
내 블로그 보고 시험공부하는 사람들은 인간적으로 따봉 눌러줘라
