1. 최단 경로탐색
- 가장 짧은 경로를 찾는 알고리즘, '길 찾기'문제로 불린다.
- 그리디 알고리즘, DP 프로그래밍이 그대로 적용된다.
1) 다익스트라 최단 경로 알고리즘
- 가중치 그래프에서, 시작정점으로부터 다른 모드 정점까지의 최단 경로를 찾는 알고리즘
- 우선순위 큐를 사용
- 어렵게 생각하지 말자
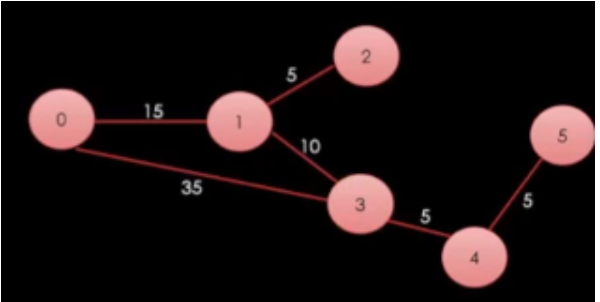
- 아래의 코드는 위의 그래프에서 각 노드로 가는 최소 비용을 출력해주는 코드다.
- 결국 경로를 들려가며 비용을 확인하면서 최단경로를 찾는 코드다
#include <iostream>
#include <vector>
#include <queue>
using namespace std;
struct Vertex
{
// int data;
};
vector<Vertex> vertices; // 정점 배열.
vector<vector<int>> adjacent; // 정점간 연결 상태 저장 배열.
void CreateGraph()
{
vertices.resize(6); // 정점 6개 생성.
// 정점간 연결 상태 저장.
// adjacent[정점1][정점2] = adjacent[정점2][정점1] = 가중치 값.
adjacent = vector<vector<int>>(6, vector<int>(6, -1));
adjacent[0][1] = adjacent[1][0] = 15;
adjacent[0][3] = adjacent[3][0] = 35;
adjacent[1][2] = adjacent[2][1] = 5;
adjacent[1][3] = adjacent[3][1] = 10;
adjacent[3][4] = adjacent[4][3] = 5;
adjacent[4][5] = adjacent[5][4] = 5;
}
// 정점과 가중치 값을 모아 놓은 구조체.
struct VertexCost
{
// 구조체 생성자.
VertexCost(int cost, int vertex) : cost(cost), vertex(vertex) { }
// pq를 사용하기 위해 연산자 오버로딩 추가. (pq의 도장 깨기용)
bool operator<(const VertexCost& other) const // const 필요.
{
return cost < other.cost;
}
// pq를 사용하기 위해 연산자 오버로딩 추가. (pq의 도장 깨기용)
bool operator>(const VertexCost& other) const // const 필요.
{
return cost > other.cost;
}
int cost;
int vertex;
};
void Dijkstra(int here)
{
// 우선순위 큐를 최소힙으로 사용.
priority_queue<VertexCost, vector<VertexCost>, greater<VertexCost>> pq;
vector<int> best(6, INT32_MAX); // 정점에 대한 최소 비용의 거리를 저장하는 배열.
vector<int> parent(6, -1); // 현재 정점을 발견한 이전의 정점을 저장하는 배열(정점 history 저장).
pq.push(VertexCost(0, here)); // 시작 정점을 우선순위 큐에 저장
best[here] = 0; // 정점에 대한 최소 비용을 저장하는 배열.
parent[here] = here; // 특정 정점을 발견한 정점을 저장하는 배열. (정점 history 참고용)
while (pq.empty() == false)
{
// 제일 좋은 후보를 찾는다.
VertexCost v = pq.top(); // 우선순위 큐에서 제일 좋은 후보를 가져옴.
pq.pop();
here = v.vertex; // 현재 정점 저장.
int cost = v.cost; // 현재 정점의 비용 저장.
// 기존에 찾았던 비용보다 높은 경우 스킵. (더 안좋은 경로를 찾은 경우)
if (best[here] < cost)
continue;
// 방문
cout << "방문!" << here << endl;
for (int there = 0; there < 6; there++)
{
// 연결되지 않았으면 스킵
if (adjacent[here][there] == -1)
continue;
// 다음 정점에 대한 현재 경로가 과거에 찾았던 경로보다 안좋으면 스킵.
int nextCost = best[here] + adjacent[here][there]; // 현재 정점부터 다음 정점까지 비용 + 이전 정점부터 현재 정점까지 비용.
if (nextCost >= best[there])
continue;
// 지금까지 찾은 경로 중 최단 경로의 정점임. = 갱신
// 나중에 더 좋은 경로를 찾으면 언제든 갱신될 수 있음.
best[there] = nextCost;
parent[there] = here;
pq.push(VertexCost(nextCost, there));
}
}
// 경로 history와 각 정점에 대한 최소 비용 출력.
cout << endl;
cout << "경로 history" << endl;
for (int i = 0; i < parent.size(); i++)
{
cout << "현재 정점 : " << i << ", 이전 정점 : " << parent[i] << endl;
}
cout << endl;
cout << "비용" << endl;
for (int i = 0; i < best.size(); i++)
{
cout << "정점 : " << i << ", 비용 : " << best[i] << endl;
}
}
int main()
{
CreateGraph();
Dijkstra(0);
}2. 벨만포드 알고리즘
- 한노드에서 목표노드로 가는데 걸리는 최소비용, 다익스트라와 동일한 점
- 다익스트라에선 간선이 음수일 때 최단경로를 구할 수 없다.
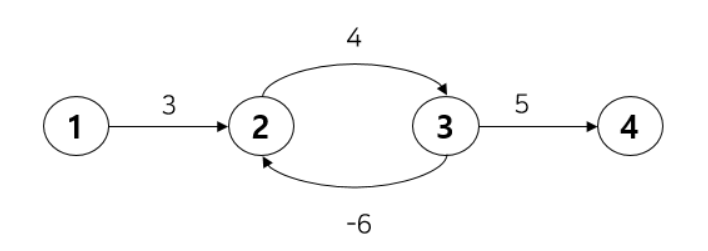
- 위 사진의 경우 다익스트라로 탐색할경우 무한히 작아진다.
- 이점을 보완한 것이 벨만포드, but 시간복잡도가 좀 더 높다.
- 다익스트라가 노드를 지나면서 최단거리를 구한다면 벨만포드는 해당 노드의 모든 간선에 대해 거리를 업데이트하며 최단거리를 구한다.
#include <iostream>
#include <vector>
#include <limits>
using namespace std;
struct Edge {
int src, dest, weight;
};
class BellmanFord {
private:
int V, E;
vector<Edge> edges;
public:
BellmanFord(int V, int E) : V(V), E(E) {
edges.resize(E);
}
void addEdge(int idx, int u, int v, int w) {
edges[idx].src = u;
edges[idx].dest = v;
edges[idx].weight = w;
}
void shortestPath(int src) {
vector<int> dist(V, numeric_limits<int>::max());
dist[src] = 0;
for (int i = 0; i < V - 1; i++) {
for (int j = 0; j < E; j++) {
int u = edges[j].src;
int v = edges[j].dest;
int weight = edges[j].weight;
if (dist[u] != numeric_limits<int>::max() && dist[u] + weight < dist[v]) {
dist[v] = dist[u] + weight;
}
}
}
for (int j = 0; j < E; j++) {
int u = edges[j].src;
int v = edges[j].dest;
int weight = edges[j].weight;
if (dist[u] != numeric_limits<int>::max() && dist[u] + weight < dist[v]) {
cout << "The graph contains a negative-weight cycle" << endl;
return;
}
}
for (int i = 0; i < V; i++) {
cout << "Vertex " << i << " distance from source: " << dist[i] << endl;
}
}
};
int main() {
int V = 5, E = 8;
BellmanFord graph(V, E);
graph.addEdge(0, 0, 1, -1);
graph.addEdge(1, 0, 2, 4);
graph.addEdge(2, 1, 2, 3);
graph.addEdge(3, 1, 3, 2);
graph.addEdge(4, 1, 4, 2);
graph.addEdge(5, 3, 2, 5);
graph.addEdge(6, 3, 1, 1);
graph.addEdge(7, 4, 3, -3);
graph.shortestPath(0);
return 0;
}3. 이제부터 슬슬 어렵다.
벨만포드 알고리즘 링크에 두번째꺼는 그림과 표의 설명이 잘못 되었다. 놀라지 말시길
Reference
- 다익스트라 최단경로 알고리즘
https://velog.io/@taeil314/AlgorithmC-%EB%8B%A4%EC%9D%B5%EC%8A%A4%ED%8A%B8%EB%9D%BC-%EC%B5%9C%EB%8B%A8-%EA%B2%BD%EB%A1%9C-%EC%95%8C%EA%B3%A0%EB%A6%AC%EC%A6%98-Dijkstra - 벨만포드 알고리즘
https://yabmoons.tistory.com/365
https://roytravel.tistory.com/340#:~:text=%EB%8B%A4%EC%9D%B5%EC%8A%A4%ED%8A%B8%EB%9D%BC%EB%8A%94%20%EC%B6%9C%EB%B0%9C%20%EB%85%B8%EB%93%9C,%EC%9D%98%20%EC%B5%9C%EC%86%8C%20%EB%B9%84%EC%9A%A9%EC%9D%84%20%EA%B5%AC%ED%95%9C%EB%8B%A4.

좋은 지식 나누어요