문제
수빈이는 동생과 숨바꼭질을 하고 있다. 수빈이는 현재 점 N(0 ≤ N ≤ 100,000)에 있고, 동생은 점 K(0 ≤ K ≤ 100,000)에 있다. 수빈이는 걷거나 순간이동을 할 수 있다. 만약, 수빈이의 위치가 X일 때 걷는다면 1초 후에 X-1 또는 X+1로 이동하게 된다. 순간이동을 하는 경우에는 0초 후에 2*X의 위치로 이동하게 된다.
수빈이와 동생의 위치가 주어졌을 때, 수빈이가 동생을 찾을 수 있는 가장 빠른 시간이 몇 초 후인지 구하는 프로그램을 작성하시오.
문제접근
- BFS에 대한 정의를 다시 생각해보자.
- BFS는
queue를 이용해서 최단 거리를 구할 수 있다. - BFS는 모든 간선의 가중치가
1일 때 사용할 수 있다. - 이때 가중치는 문제에서 구하고자 하는 값과 동일한 특성을 가져야 한다.
- e.g. 문제에서 '거리'를 구하려고 하면 가중치는 '거리' 여야 한다.
- BFS는
- 그럼, 만일 간선의 가중치가 1이 아닐 때는 어떨까?
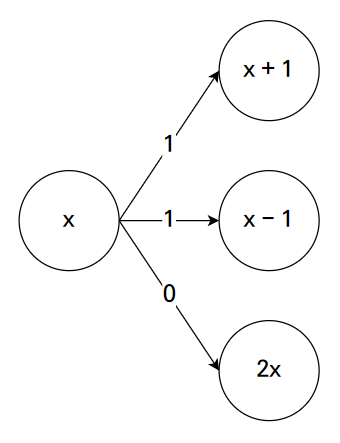
- 수빈이는
x점에 있을 때, 1초를 소요해서 앞으로 한 칸, 뒤로 한 칸 갈 수 있고 또는 바로2x점으로 순간이동 할 수 있다. 따라서 간선의 가중치가1로 동일하다고 할 수 없다. - 이런 경우에 BFS를 사용하는 방법은 두 가지다.
- DP에서 우리는 문제에 주어진 조건에 따라 1차원 메모이제이션 뿐만 아니라 2차원, 3차원 메모이제이션도 사용했다. 이를 이용해서 정점을 나타내는 방법을 차원을 다르게 해서 표현하는 방법이 있다. 이 방법을 사용하면 모든 간선의 가중치를
1로 만들 수 있다. 다중 queue를 사용할 수 있다. 예를 들어,0인 간선을 저장하는 큐, 1인 간선을 저장하는 큐, 2인 간선을 저장하는 큐 등으로 여러 큐를 만든 다음 원하는 곳에 push-pop 하도록 구현해서 가중치를1로 만들 수 있다.- 특히, 본 문제처럼 간선의 가중치가 두 가지인 문제를 0, 1 BFS라고 부르며,
deque을 이용해서 구현한다.
- 특히, 본 문제처럼 간선의 가중치가 두 가지인 문제를 0, 1 BFS라고 부르며,
- DP에서 우리는 문제에 주어진 조건에 따라 1차원 메모이제이션 뿐만 아니라 2차원, 3차원 메모이제이션도 사용했다. 이를 이용해서 정점을 나타내는 방법을 차원을 다르게 해서 표현하는 방법이 있다. 이 방법을 사용하면 모든 간선의 가중치를
- 1초가 소요되는 두 가지 이동의 경우
push_back()으로 정점을 뒤로 넣어준다.
0초가 소요되는 순간이동의 경우push_front()로 정점을 앞으로 넣어준다.
코드
#include <iostream>
#include <algorithm>
#include <deque>
using namespace std;
int n, k, ans = INT32_MAX;
bool visited[100001];
int main(){
cin >> n >> k;
deque<pair<int,int>> q;
q.push_back(make_pair(n,0));
while(!q.empty()){
int pos = q.front().first, t = q.front().second;
int goPos = pos + 1, backPos = pos - 1, telePos = 2 * pos;
q.pop_front();
if(pos == k) ans = min(ans, t);
if(telePos <= 100001 && !visited[telePos]){
visited[telePos] = true;
q.push_front({telePos, t});
}
if(backPos >= 0 && !visited[backPos]){
visited[backPos] = true;
q.push_back(make_pair(backPos, t + 1));
}
if(goPos <= 100001 && !visited[goPos]){
visited[goPos] = true;
q.push_back(make_pair(goPos, t + 1));
}
}
cout << ans << '\n';
}결과


임베디드 시스템 공학자를 지망하는 컴퓨터공학+전자공학 복수전공 학부생입니다. 타인의 피드백을 수용하고 숙고하고 대응하며 자극과 반응 사이의 간격을 늘리며 스스로 반응을 컨트롤 할 수 있는 주도적인 사람이 되는 것이 저의 20대의 목표입니다.