[논문] Camera Distance-aware Top-down Approach for 3D Multi-person Pose Estimation from a Single RGB Image[ICCV 2019]
Pose Estimation 논문 리뷰
목록 보기
1/12
Gyeongsik Moon, Ju Yong Chang, Kyoung Mu Lee, ECE & ASRI, Seoul National University, Korea, ECE, Kwangwoon University, Korea
Abstract
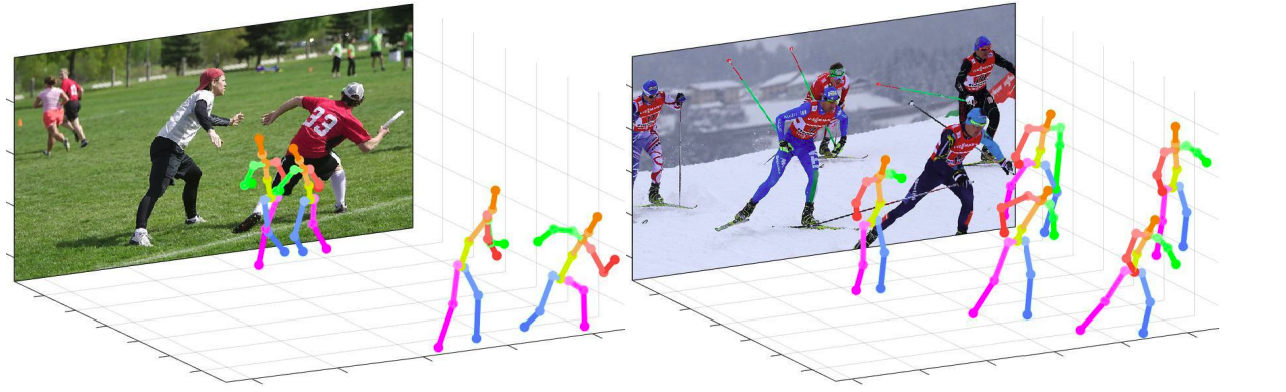
- 카메라 거리를 아는 상태에서의 top-down방식을 통한 3D single RGB 이미지로 부터 3D "multi" person pose estimation
- pipeline modules
- human detection
- absolute 3D human root localization
- root relative 3D single-person pose estimation
Introduction
- 본 연구는 세 개의 모듈을 사용한다.
- Input 이미지로부터 bbox를 찾는 DetectNet
- 카메라 중점의 사람의 중심(root) 좌표를 찾아 내는 RootNet
- 각각의 detect된 사람의 Root-relative 3D pose를 찾는 PoseNet
Related works
- 2D Multi-person Pose Estimation
- Top-down: 추론된 offset vector와 heatmap을 통해서 joint의 위치를 찾아내는 방식.
- Bottom-up:각각의 joint를 찾고, 그후 각각의 사람단위로 집합을 만드는 방식.
- 3D Single-person Pose Estimation
- single-stage approach: Input 이미지로부터 바로 3d pose를 찾아내는 방식
- two-stage approach: 2D좌표를 먼저 찾고 3D로 변환하는 방식
- 3D Multi-person Pose Estimation
- LCRNet(top-down): 사람 찾고, 사람의 anchor pose(2D pose와 root-relative pose쌍) 찾고, anchor pose를 걸러내는 방식
- bottom-up방식: 잘린부분, 보이지 않는 부분에 좋은 방식
- 3D Human Root Localization in 3D Multi-person Pose Estimation
Overview of the Proposed Model
- DetectNet: Input이미지로부터 사람의 bounding box를 찾고
- RootNet: cropped된 이미지로부터 사람의 중심 을 찾고(은 pixel coordinates, 은 depth value)
- PoseNet: cropped된 이미지로부터 root-relative 3D pose 을 찾아,
- 을 더함으로써 을 로 변환하고, 와 를 원래 이미지공간으로 변환시킨 후, simple back-projection을 통해 마지막 3D pose 를 얻는다
DetectNet
- MaskRCNN
- ResNet: feature map 추출
- Region Proposal Network: bbox 후보 추출
- HeadNet: bbox 정제
RootNet
- human depth를 구하기 위한
- : focal lengths divided by the per-pixel distance factors (pixel) of x- and y-axes
- :실제 공간()에서의 사람 면적
- : image 공간()
- Camera Normalization
- correction factor 를 출력 -> 를 학습에 사용
- 모델 구조
- ResNet을 통한 feature 추출
- BN과 ReLU을 포함한 Deconv 연속 3회를 통한 2D이미지 coordinate 추출
- 1-by-1 conv를 통한 중심(root)의 heatmap추출
- soft-argmax로 2D heatmap에서 추출
- feature을 pooling과 1-by-1 conv를 통한 추출
- k와 를 통한 계산
- loss: L1
PoseNet
- ResNet을 이용한 cropped 이미지의 global feature map 추출
- feature map을 BN과 ReLU를 포함한 연속적인 3번의 deconv를 통해 upsample하고 1-by-1 conv해서 3D heatmap추출
- loss: L1

그러나 먼저 된 자로서 나중되고 나중 된 자로서 먼저될 자가 많으니라(마:19:30)