Tree
- 비선형 자료구조
- 계층적 관계 (Hierarchical Relationship) 를 표현하는 자료구조
- 트리를 구성하고 있는 요소들
- Node : 트리를 구성하는 각각의 요소
- Edge : 트리를 구성하는 노드들을 연결하는 선
- Root Node : 트리 구조에서 최상위에 있는 노드
- Terminal Node = Leaf Node = External Node (단말 노드) : 하위에 다른 노드가 연결되어 있지 않은 노드
- Internal Node : 단말 노드를 제외한 모든 노드 (루트 노드 포함)
트리의 종류
1. Binary Tree
2. Full Binary Tree
3. Complete Binary Tree
4. BST (Binary Search Tree)
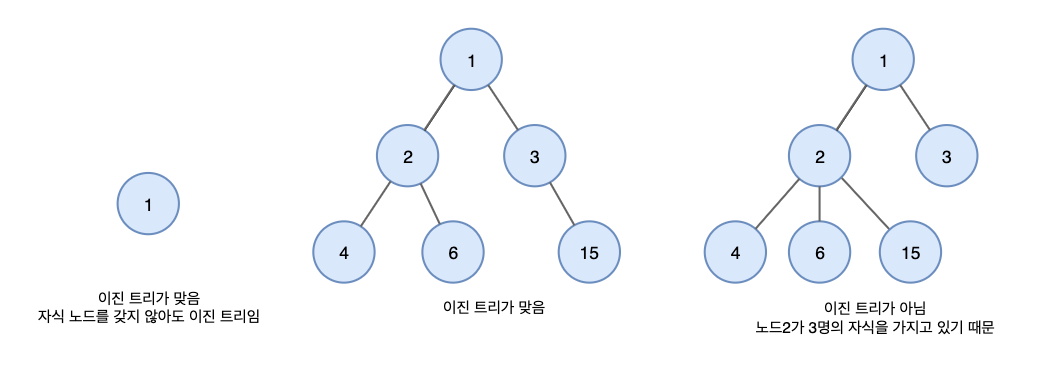
Binary Tree _ 이진트리
- 모든 노드들이
둘 이하의 자식을 가진 트리 - 루트 노드를 중심으로
2개의 서브트리(큰 트리에 속하는 작은 트리) 로 나뉘어진다.
이 때, 나뉘어진 두 서브트리도 모두 이진 트리어야 한다. - 공집합도 이진 트리로 포함된다.
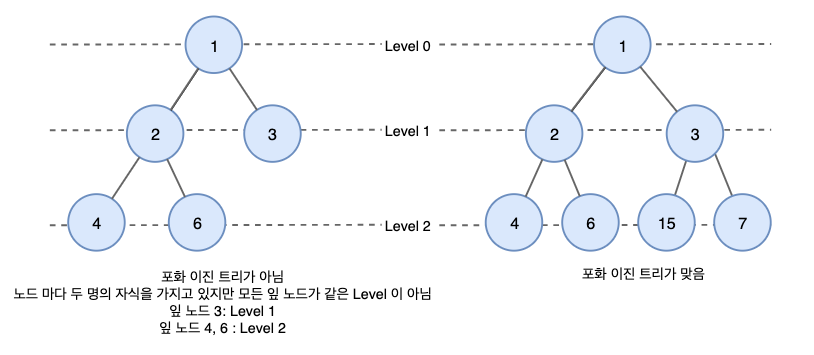
- 트리의 Level
0부터 시작하므로 루트 노드의 레벨은 0
트리의 최고 레벨은 해당 트리의 height (높이) 가 된다.
- Perfect Binary Tree (포화 이진 트리)
: 모든 레벨이 꽉 찬 이진 트리
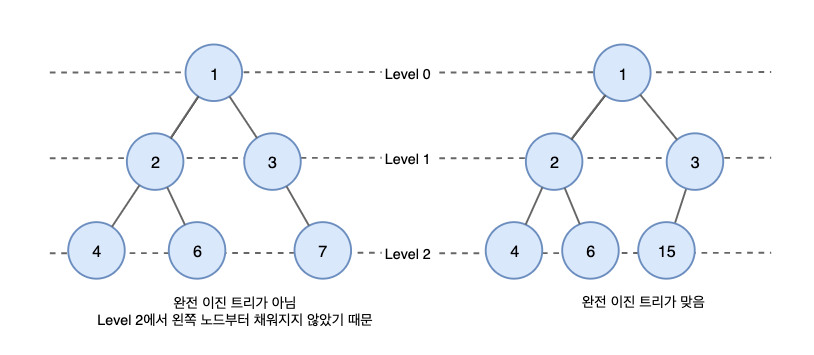
- Complete Binary Tree (완전 이진 트리)
: 위에서 아래로, 왼쪽에서 오른쪽으로 순서대로 채워진 이진 트리
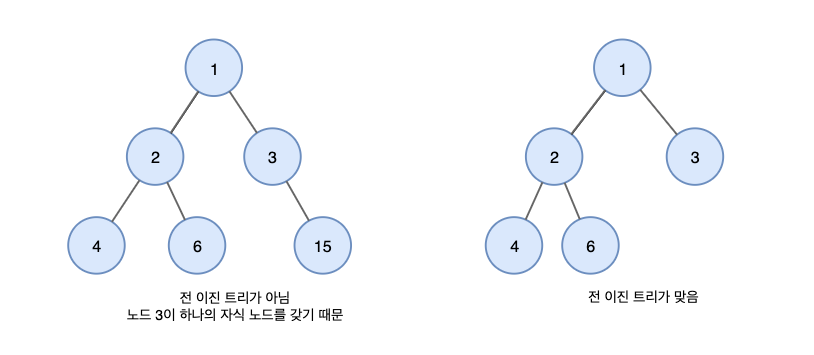
- Full Binary Tree (정 이진 트리)
: 모든 노드가 0개 or 2개의 자식 노드만을 갖는 이진 트리
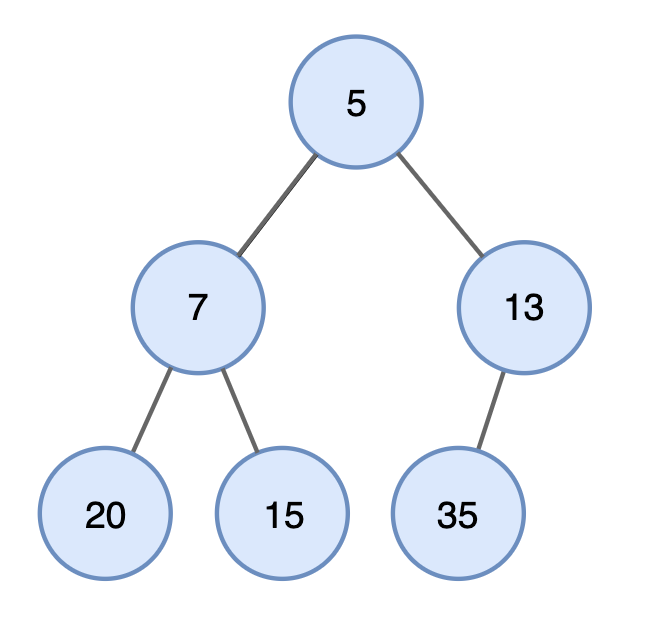
BST (Binary Search Tree)
효율적인 탐색을 위해서는 '어떻게 찾을까' 를 고민하기보다 효율적인 탐색을 위한 '저장방법이 무엇일까' 를 고민해야 한다.
- 이진 탐색 트리에는 이진 트리의 일종이지만, BST에는 데이터를 저장하는 규칙이 있으며 이는 특정 데이터의 위치를 찾는데 사용할 수 있다.
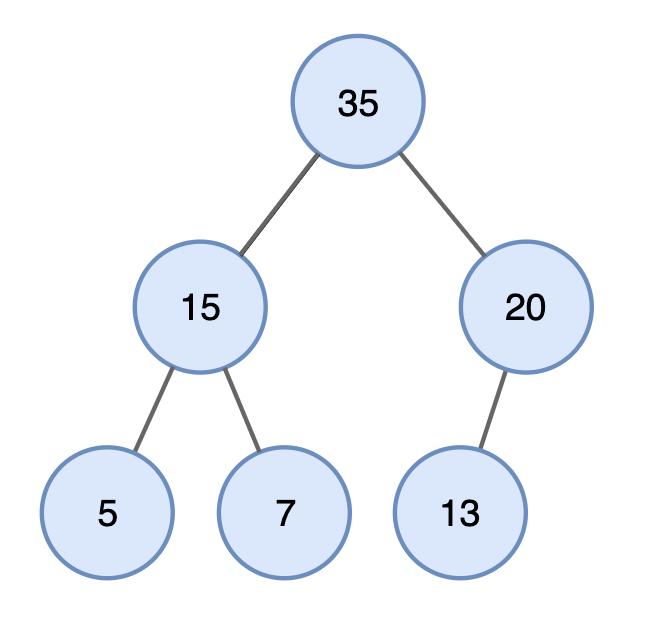
규칙 1) BST의 노드에 저장된 키는 유일하다
규칙 2) 부모의 키 > 왼쪽 자식 노드의 키
규칙 3) 부모의 키 < 오른쪽 자식 노드의 키
규칙 4) 왼쪽, 오른쪽 서브 트리 == 이진탐색트리- 이진 탐색은
원소가 정렬되어 있다는 조건 아래정렬된 특징을 이용해 반 씩 쪼개가며 검색하므로, 검색 횟수가 획기적으로 낮아진다. - O(logN) 의 시간 복잡도를 갖는다.
- 저장 순서에 따라 한 쪽으로만 노드가 추가되면 Skewed Tree가 될 수 있어 이럴 경우 탐색의 Worst Case가 되어 O(n) 의 시간복잡도를 가진다.
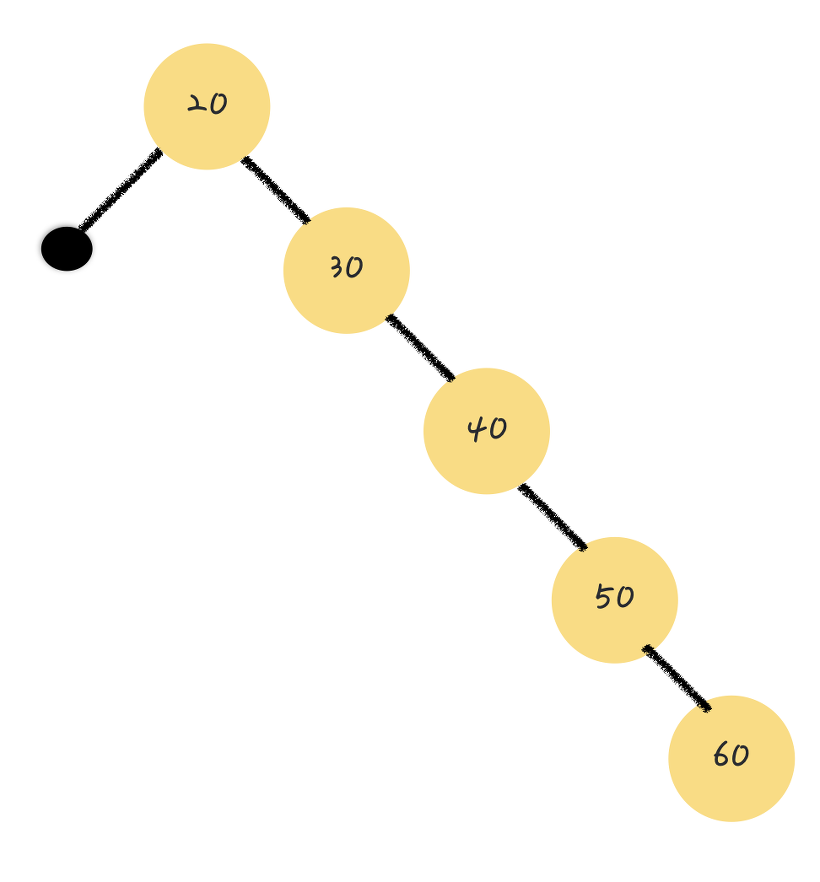
→ 이런 비효율적인 상황을 해결하기 위해 트리의 균형을 잡기 위한 재조정 Rebalancing 기법이 등장 ( 이를 구현한 트리가 Red-Black Tree )
이진탐색 트리의 목적 : 이진 탐색 + 연결리스트
- 이진 탐색 : 탐색 O(logN) / 삽입+삭제가 불가능
- 연결리스트 : 삽입, 삭제 O(1) / 탐색 O(N)
→ 두가지를 합하여 장점을 얻는 것이 이진 탐색 트리
효율적인 탐색 능력 + 자료의 삽입 삭제도 가능하게 만들자!
Binary Heap
- 트리 중에서도 배열에 기반한 Complete Binary Tree (완전 이진 트리)
- 배열에 트리 값을 넣어줄 때, 1번 index 부터 루트노드가 시작된다.
(노드의 고유번호 값과 배열의 index를 일치시켜 혼동을 줄이기 위함)
배열을 사용하여 효율적인 관리 가능!
= 즉, random access 가능
- 힙 : 최대힙 / 최소 힙
- Max Heap : 각 노드의 값이 해당 children 의 값보다 크거나 같은 트리
- 루트 노드의 값이 가장 크기 때문에, 최댓값을 찾는데 소요되는 연산 O(1)
- Min Heap : 각 노드의 값이 해당 children 의 값보다 작거나 같은 트리
- 루트 노드의 값이 가장 작기 때문에, 최솟값을 찾는데 소요되는 연산 O(1)
- heap 의 구조를 유지하기 위해서는 제거된 루트 노드를 대체할 다른 노드가 필요
→ 맨 마지막 노드를 루트 노드로 대체시키고, heapify 과정을 거쳐 구조를 유지
결국 O(logN) 으로 최댓값, 최솟값에 접근할 수 있다.
Heapify 란? 이진트리에서 힙 속성을 유지하는 작업!최대힙에서의 heapify 작업 순서
1. 요소 값과 자식 노드 값을 비교합니다.
2. 만약 자식 노드 값이 크다면 왼쪽 오른쪽 자식 중 가장 큰 값으로 교환합니다.
3. 힙 속성이 유지 될 때까지 1,2번 과정을 반복합니다.
Red Black Tree
https://zeddios.tistory.com/237
- Binary Search Tree 를 기반으로 하는 트리 형식의 자료구조
- 탐색, 삽입, 삭제에 O(logN) 소요
- 동일한 노드의 개수일 때, depth를 최소화하여 시간 복잡도를 줄이는 것이 핵심!
- Red Black Tree = Balanced Binary Search Tree
= Skewed tree 가 나오지 않도록 조건을 걸어두었음
= 균형이 잡혀있으므로, Skewed tree가 안나오므로 레드블랙트리의 높이는 logN 에 바운드 된다
= Search 연산은 O(logN)의 시간복잡도
1. 루트 노드: Black
2. External Node (Leaf Node) : Black
3. Internal : Red 노드의 자식은 Black (Red 연속해서 나올 수 없음)
4. 모든 리프노드에서 Black Depth 는 동일- 최소 경로와 최대 경로 크기 비율 2 미만
ex) 최소 경로 - Black 노드만 있는 것
최대 경로 - B-R-B-R-B-R...
Hash Table
https://preamtree.tistory.com/20
- Hash table : Key, Value를 갖는 자료구조
- hash는 내부적으로 배열을 사용하여 데이터 저장하므로 빠른 검색 속도 가짐
- 특정한 값을 Search 하는데 데이터 고유의 인덱스로 접근하게 되므로 average case 에 대하여 Time Complexity 가 O(1)이 되는 것이다.(항상 O(1)이 아니고 average case 에 대해서 O(1)인 것은 collision 때문이다.)
- 인덱스로 저장되는 key 값이 불규칙하므로,
특별한 알고리즘을 이용하여 저장할 데이터와 연관된 고유한 숫자를 만들어 낸 뒤 이를 인덱스로 사용
- 특정 데이터가 저장되는 인덱스 = 그 데이터만의 고유한 위치
따라서, 삽입/삭제 시 추가적인 비용이 없음
특별한 알고리즘 이란? Hash Function
- hashcode : hash method 또는 hash function 에 의해 반환된 데이터의 고유 숫자 값
- 저장되는 값들의 key 값을 hash function 을 통해 작은 범위 값으로 변경
- Collision : 동일한 key 값에 복수 개의 데이터가 하나의 테이블에 존재할 수 있게 되는 것 / 서로 다른 2개의 키가 같은 인덱스로 hashing되면 같은 곳에 저장할 수 없게 됨
→ 그렇다면, 좋은 hash function 의 조건은?
- 일반적으로는, 키의 일부분이 아니라 키 전체를 참조하여 해쉬 값을 만들어내야 한다.
- hash function을 무조건 1:1 로 만들기보다는 Collision을 최소화하는 방향으로 설계하고, Collision에 어떻게 대응할 것인가가 더 중요함
Resolve Conflict
1. Open Address 방식 (개방 주소법)
- 해시충돌 발생 시 (즉, 삽입하려는 해시버킷이 이미 사용중인 경우) 다른 해시 버킷에 해당 자료를 삽입
- Collision 발생 시, 데이터 저장할 장소를 찾아 다님
- Linear Probing
- Quadratic Probing
- Double Hashing Probing
2. Separate Chaining 방식 (분리 연결법)
- 속도 : Open Addressing < Separate Chaining
- 해시충돌이 잘 발생하지 않도록 보조 해시 함수를 통해 조정할 수 있다면 Worst Case 로 가는 빈도 줄일 수 있음
- 2가지 구현 방식 존재
- 연결리스트 (Linked List)
- 각각의 버킷들을 연결리스트로 만들어 Collision 발생시 해당 버킷의 list에 추가하는 방식
- 삽입/삭제가 간단
- Tree (Red-Black Tree)
연결리스트 / 트리 사용을 결정하는 기준 = 하나의 해시 버킷에 할당된 key-value 쌍의 개수- 트리는 기본적인 메모리 사용량 많으므로, 데이터 개수가 적다면 Linked List 사용하자
→ 그렇다면, 데이터가 적다는 의미는 어느 정도를 의미하는가?
- 6개, 8개 기준으로 결정한다 → 변경하는데 소요되는 비용을 줄이기 위해서!
ex) 버킷에 6개의 key-value 쌍이 있었는데 하나가 추가된 순간 linked list -> tree / 하나가 삭제된 순간 tree -> linked list
- 이런식으로 각각의 자료구조로 넘어가는 기준이 1이면, Switching 비용이 너무 많이 필요
Open Addressing vs Separate Chaining
- Open Addressing
- 연속된 공간에 데이터 저장하므로 Separate Chaining 보다 캐시 효율이 높다.
- 데이터 개수가 충분히 적으면, Open Address 가 더 성능이 좋음
- Separate Chaining
- Open Address 처럼 버킷을 계속해서 사용하지는 않기 때문에 테이블의 확장을 보다 늦출 수 있다.
- 보조해시 함수로 Worst Case에 가까워지는 경우를 줄일 수 있다.
- 해시 버킷 동적 확장(Resize)
- 해시 버킷의 개수가 적으면 메모리는 아끼지만, 해시 충돌로 인한 성능 손실이 발생
- HashMap 은 key-value 데이터 개수가 일정 개수 이상이면 해시 버킷 개수를 2배로 늘림
→ 여기서 일정개수 이상이란?
- 데이터 개수가 해시버킷 개수의 75% 될 때
- load factor: 0.75
Graph
- 정점과 간선의 집합
- Directed Graph / Undirected Graph
- Degree : 각 정점에 연결된 Edge의 개수
- Outdegree : 각 정점으로부터 나가는 간선의 개수
- Indegree : 들어오는 간선의 개수
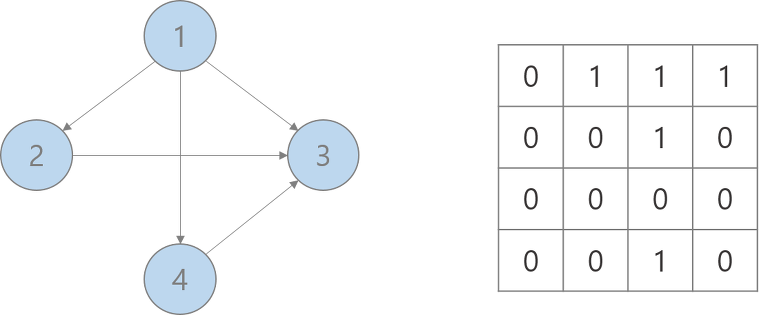
- 그래프를 구현하는 2가지 방법
- 인접행렬: 정방행렬 사용
- 해당하는 위치의 value 값을 통해 vertex 간의 연결관계 O(1) 으로 파악
- edge 개수와 무관하게 v^2 의 공간복잡도
- dense graph 표현할 때 적절한 방법
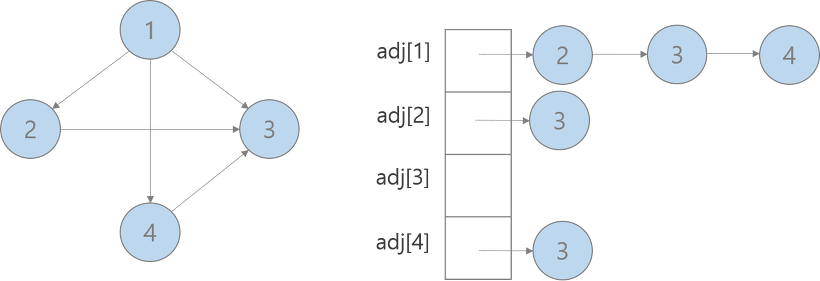
- 인접리스트: 연결리스트 사용
- 인접한 정점의 리스트를 확인해봐야 하므로 vertex 간 연결 여부 확인하는데 오래 걸림
- 공간 복잡도 O(E+V)
- sparse graph 표현할 때 적절한 방법
그래프 탐색
1. 깊이 우선 탐색 (Depth First Search: DFS)
- 그래프 상에 존재하는 임의의 한 정점으로부터
연결되어 있는 한 정점으로만나아간다
= 일단 연결된 정점으로 탐색하는 것 - 갔던 길을 되돌아오는 상황이 존재하는 미로찾기처럼 구성
- Stack 사용
- 시간복잡도 : O(V+E)
2. 너비 우선 탐색 (Breadth First Search: BFS)
- 그래프 상에 존재하는 임의의 한 정점으로부터
연결되어 있는 모든 정점으로나아간다. - Queue 사용 : 연락을 취할 정점의 순서를 기록하기 위한 것
- 탐색을 시작하는 정점을 Queue 에 넣는다.(enqueue)
- dequeue 를 하면서 dequeue 하는 정점과 간선으로 연결되어 있는 정점들을 enqueue 한다.
→ 즉, 정점들을 방문한 순서대로 queue에 저장하는 방법 사용
- 시간복잡도 : O(V+E)
- BFS로 구한 경로는 최단 경로
Spaaning Tree 란?
- 그래프 내의 모든 정점을 포함하는 트리
= 그래프의 최소 연결 (간선의 수가 가장 적은) 부분 그래프
= 그래프에서 일부 간선을 선택해서 만든 트리
- 모든 정점이 연결되어있어야 하며, 사이클을 포함해서는 안됨
- 그래프의 n개의 정점을 정확히 (n-1)개의 간선으로 연결최소 신장 트리, MST (Minimum Spanning Tree)
- Spanning Tree 중에서 사용된 간선들의 가중치 합이 최소인 트리
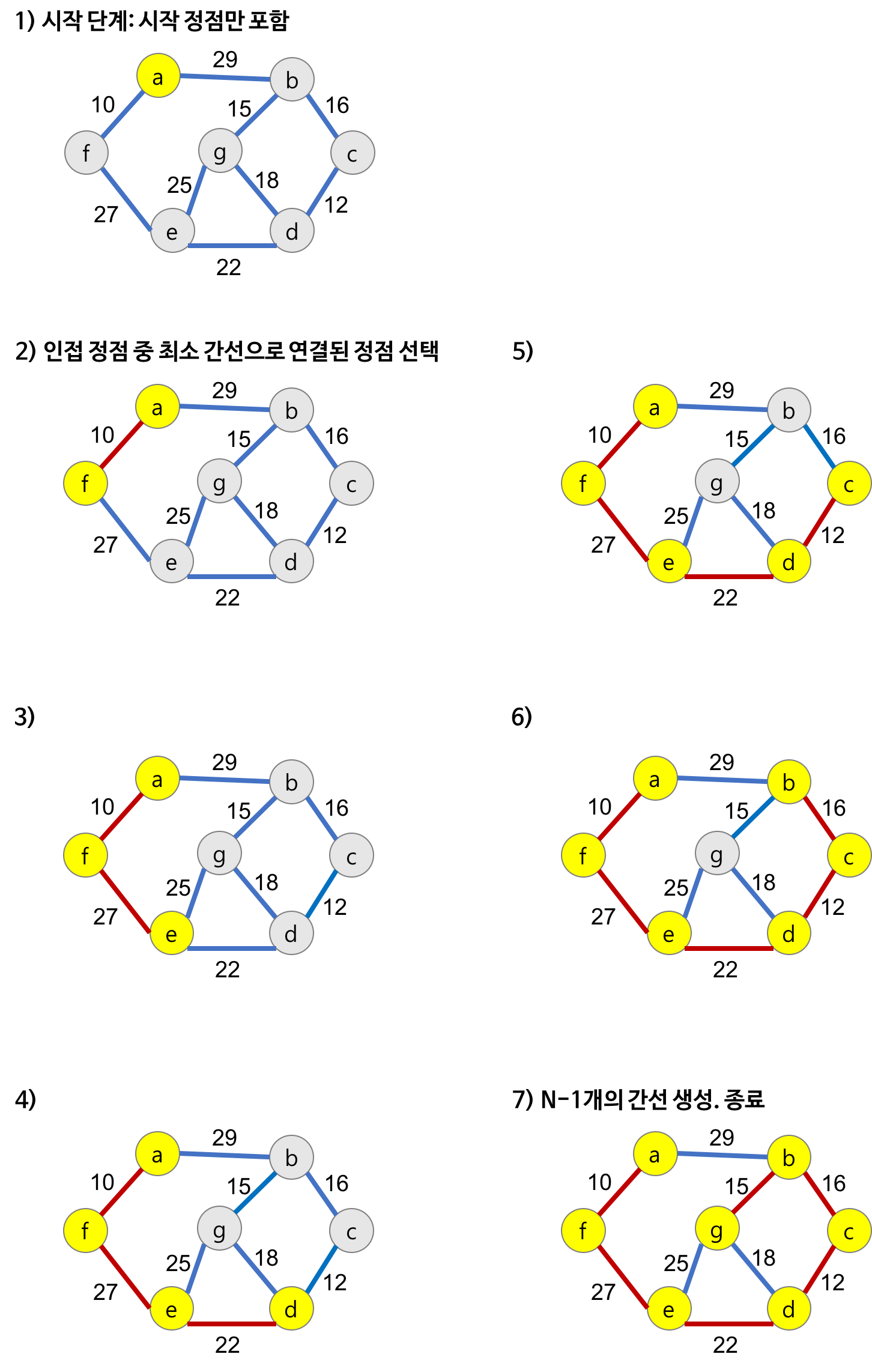
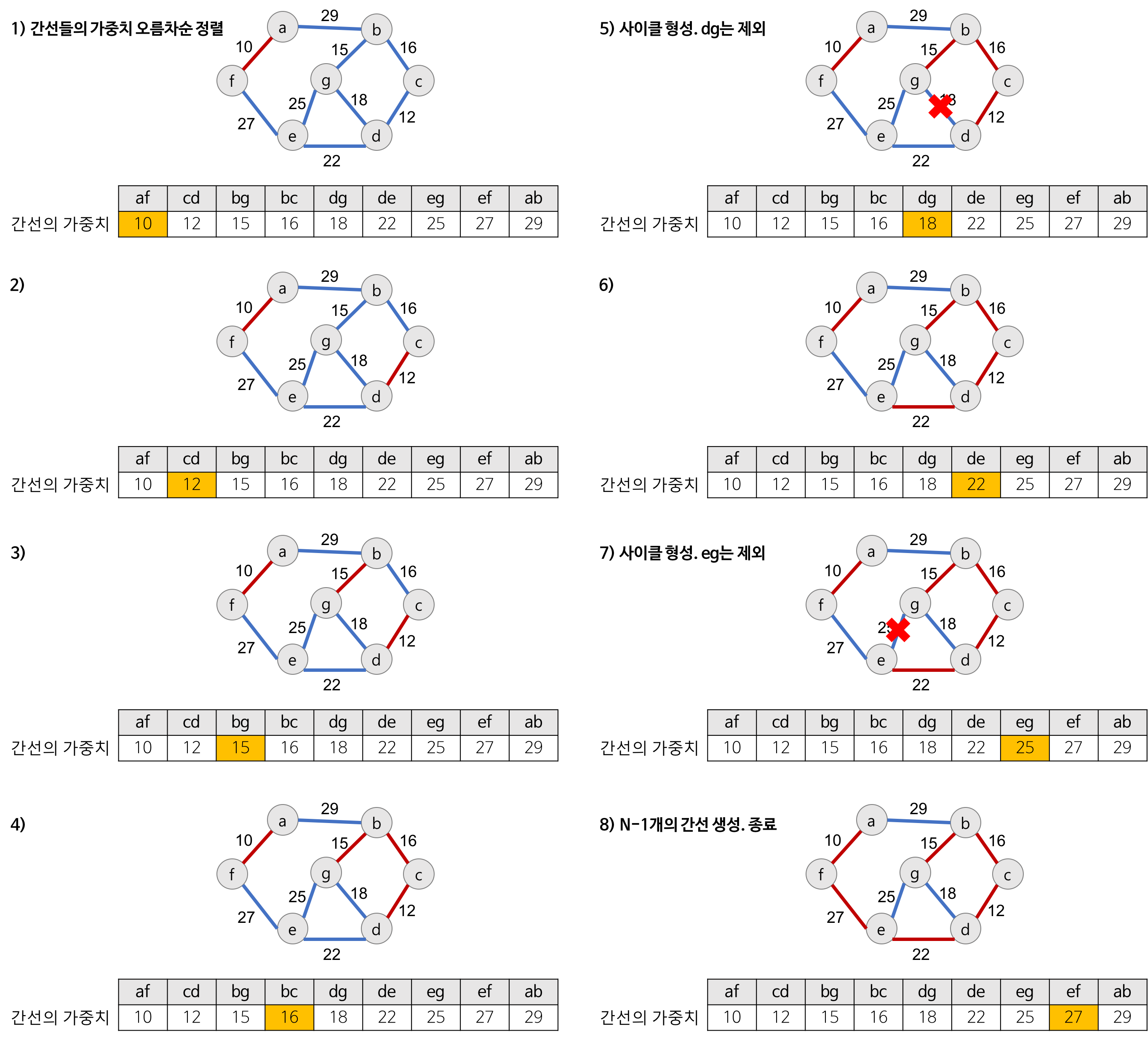
- Kruskal Algorithm
https://gmlwjd9405.github.io/2018/08/29/algorithm-kruskal-mst.html
- 탐욕적 방법(greedy) 을 이용하여 가중치를 간선에 할당한 그래프의 모든 정점을 최소 비용으로 연결하는 최적 해답을 구하는 것
탐욕적 방법
- 그 순간에 가장 좋다고 생각되는 것을 선택함으로써 최종 해답에 도달하는 것
- 그 순간에는 최적이지만, 전체적으로 최적이라는 보장은 없음 _ 검증 과정 필요-
간선 선택을 기반으로 하는 알고리즘
-
이전 단계에서 만들어진 신장트리와 관계없이 무조건 최소 간선만을 선택하는 방법
-
Kruskal 알고리즘의 동작
1. 그래프의 간선들을 가중치 오름차순으로 정렬
2. 정렬된 간선 리스트에서 순서대로 사이클을 형성하지 않는 간선 선택
3. 해당 간선을 MST 집합에 추가→ Cycle 생성 여부를 판단하는 방법 : 추가하고자 하는 간선의 양 끝 정점이 같은 집합에 속해있는지 검사
- Graph 의 각 정점에 set-id라는 것을 추가적으로 부여
- 1~n 의 값으로 각각의 정점을 초기화
- 연결할 때마다 set-id를 하나로 통일시키는데, 값이 동일한 set-id 개수가 많은 set-id 값으로 통일
- 시간복잡도 : 간선들을 정렬하는 시간에 좌우됨_ 퀵정렬로 정렬하면 O(ElogE)
- 시작 정점에서부터 출발하여 신장 트리 집합을 단계적으로 확장해가는 방법
- 정점 선택을 기반으로 하는 알고리즘