영상 기하학
월드 좌표계
사물의 위치를 표현할 때 기준으로 삼는 좌표계
문제에 따라 임의로 잡아서 사용 : 바닥면
카메라 좌표계
카메라를 기준으로 한 좌표계
영상 좌표계
영상에 대한 좌표계
정규 좌표계
카메라의 내부 파라미터(intrinsic parameter)의 영향을 제거한 이미지 좌표계
내부 파라미터
사용된 렌즈, 렌즈와 이미지 센서와의 거리, 렌즈와 이미지 센서가 이루는 각 등
카메라 내부의 기구적인 부분에 의한 파라미터
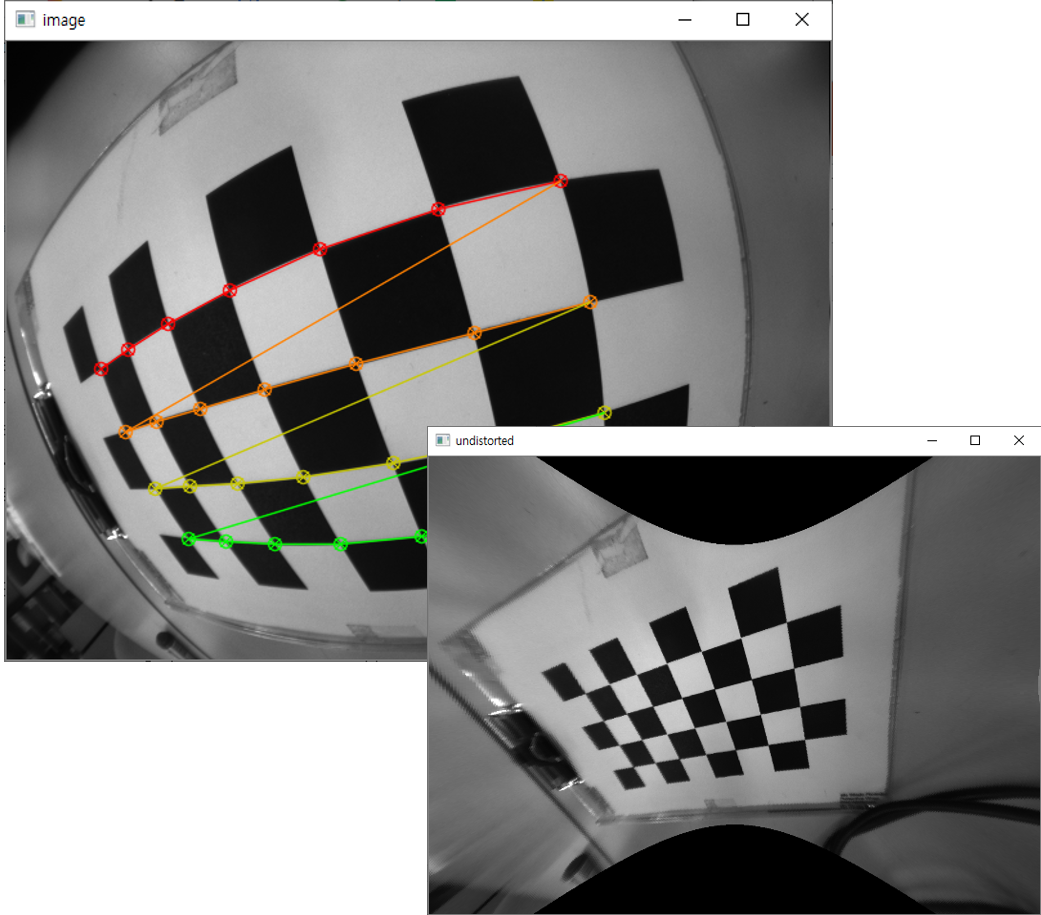
카메라 캘리브레이션
내부 파라미터 값을 구하는 과정
캘리브레이션 패턴(chess board)이 인쇄된 종이를 다양한 위치 및 각도에서 카메라로 촬영한 후 영상으로 저장하고 툴(tool)로 캘리브레이션을 수행
렌즈왜곡계수(k1, k2, p1, p2)는 동일
초점거리(fx,fy), 주점(cx,cy)만 영상 해상도에 비례해서 조정
외부 파라미터
카메라 좌표계와 월드 좌표계 사이의 변환 관계를 설명하는 파라미터
두 좌표계 사이의 회전(rotation) 및 평행이동(translation) 변환으로 표현
실행
demo
데스크탑에서 GPU없이 학습된 모델을 구동할 수 있도록 demo만 구성
python .\main.py \
--mode demo \
--cfg yolov3-tiny_tstl_416_my.cfg \
--checkpoint output/model_epoch2000.pth \
--output samplert
mp4 영상을 입력받아 객체 감지 결과를 확인
python .\main_rt.py \
--cfg yolov3-tiny_tstl_416_my.cfg \
--checkpoint output/model_epoch2000.pthbev
객체 감지 결과에 BEV 적용
python .\main_bev.py \
--cfg yolov3-tiny_tstl_416_my.cfg \
--checkpoint output/model_epoch2000.pth