0. 목차
- 모델 개요
- 모델 구조
- 모델의 장점과 단점
- 코드 리뷰
1. 모델 개요
cnn의 깊이가 깊어지면 어떤일이 발생하는지를 중점으로 모델을 쌓았다. 3x3의 아주 작은 conv layer을 사용하였고 이 conv layer가 16층, 19층을 쌓으면 좋은 성능을 낼 수 있다고 생각하였고 이를 구현한 모델이다. 16층이나 19층처럼 층을 깊게 쌓으면 모든 데이터셋에 어느정도 일반화할 수 있는 성능을 가진다고 판단해 현재까지도 backbone으로 많이 사용된다.
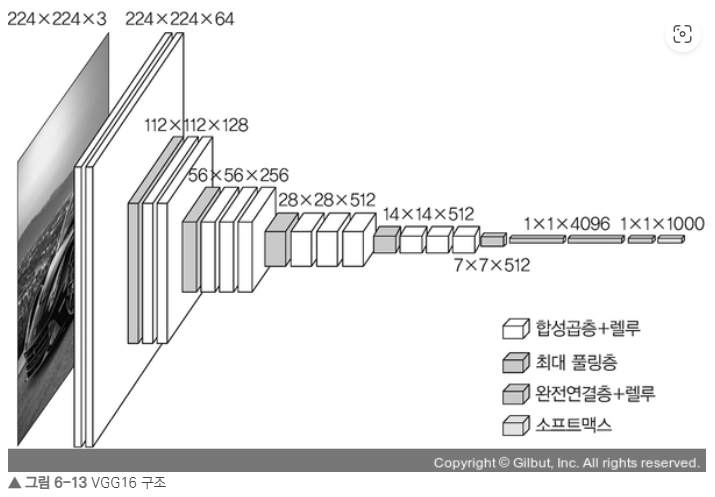
2. 모델 구조
- 13개의 conv layer + 3개의 FC layer
- 3x3 conv filters
- 1x1 strides
- 1x1 padding
- 2x2 max pooling(strides 2)
- activation : ReLU
- 전처리는 오직 trainset의 RGB값을 빼기만 하였다.
왜 3x3을 했는가?
- 3x3을 2번 conv하는 것과 5x5로 1번 conv하는 건 동일 feature map을 반환한다.
- 채널 수를 C라고 가정했을 때, VGGNet에서 3 × 3 필터를 사용한 이유는, 3 × 3 필터 3개를 쌓았을 경우에 총 27×C^2개의 가중치 파라미터를 갖고, 7 × 7 의 필터를 사용할 경우에 49×C^2의 가중치 파라미터 개수를 갖는다. 즉 연산량을 줄일 수 있다.
- 1개의 큰 필터 레이어를 거치는 것보다, 3개의 작은 필터를 거치면서 ‘비선형성’을 증가시킬 수 있다
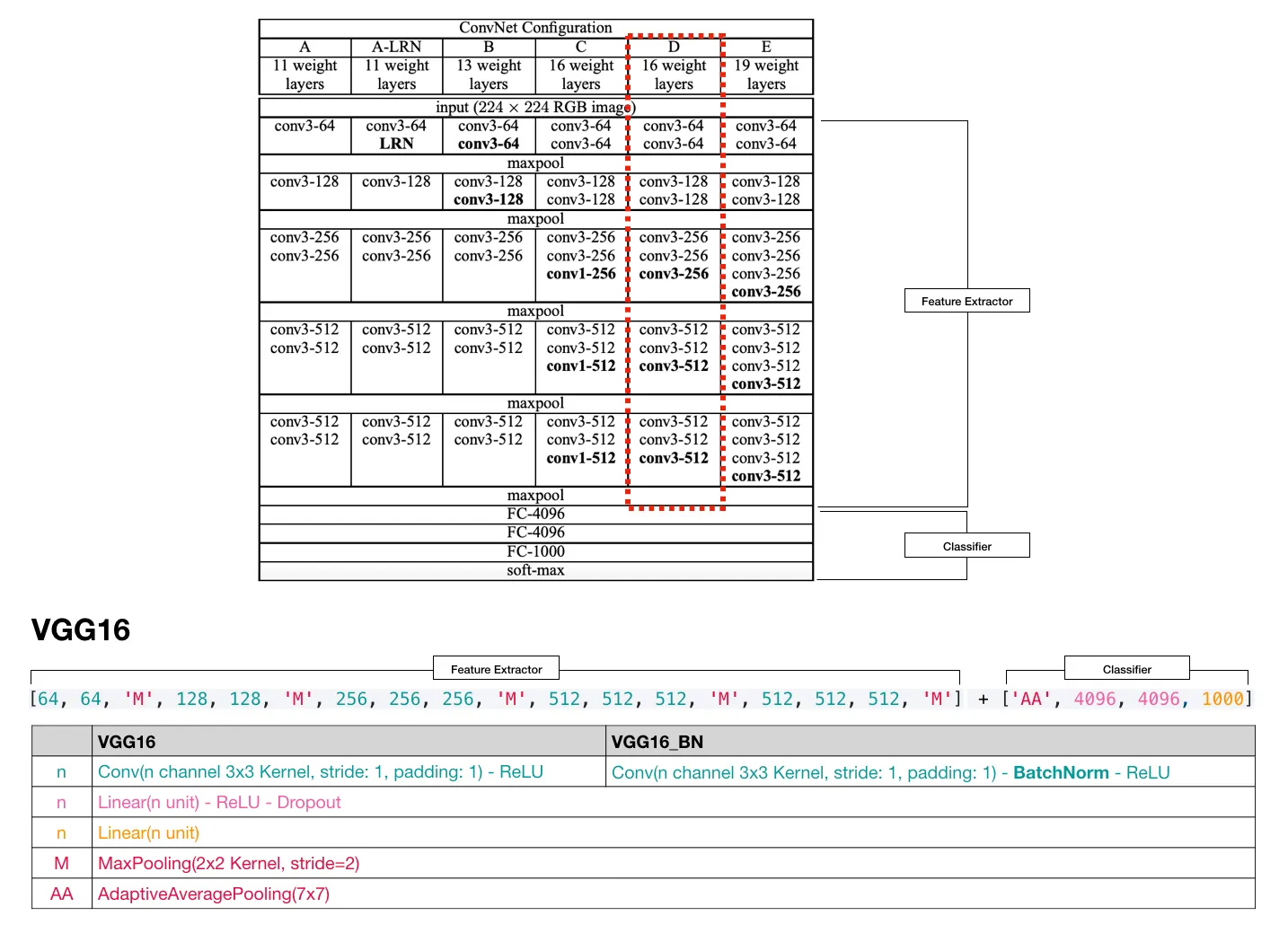
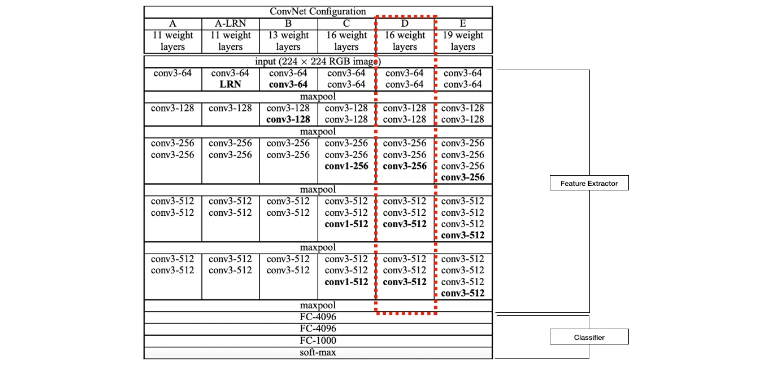
VGGNet16의 conv map은 빨간색 박스를 확인하면 된다.
3. 모델 장단점
| 장점 | 단점 |
|---|---|
| 시간 단축이 가능하다 | 파라미터수가 많다 |
4. 코드 리뷰
아래는 vggnet16의 텐서플로 코드이다. 다음과 같은 사항을 확인하면 좋을 듯 하다.
- 모델 구조는 하단 빨간 박스를 참고하였다.
- VGGNet에서 maxpooling의 사이즈와 stride는 2x2로 정해져있다.
- 모든 VGGNet에서 fclayer의 구조는 정해져있다.
- maxpool - 4096size의 fc layer두개 - 1000size의 softmax
- 1000size는 임의로 정한 것이며 이정도 사이즈면 특징을 잘 처리할 수 있을 것이라 기대하고 넣은 값이다.
- 모든 cnn이 그렇듯 fc layer에 넣기 전에 flatten을 해야 한다.
- dropout은 train할 때는 0.5, test할 때는 1로 변경해야 한다.
- optimizer는 Adam을 썼으며 loss는 구별할 게 여러개이므로 categorical_crossentropy를 사용하였다.
class VGG16(Sequential):
def __init__(self, input_shape):
super().__init__()
self.add(Conv2D(64, kernel_size=(3,3), padding='same',
activation='relu', input_shape=input_shape))
self.add(Conv2D(64, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(MaxPooling2D(pool_size=(2,2), strides=(2,2)))
self.add(Conv2D(128, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(128, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(MaxPooling2D(pool_size=(2,2), strides= (2,2)))
self.add(Conv2D(256, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(256, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(256, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(MaxPooling2D(pool_size=(2,2), strides=(2,2)))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(MaxPooling2D(pool_size=(2,2), strides=(2,2)))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(Conv2D(512, kernel_size=(3,3), padding='same',
activation='relu'))
self.add(MaxPooling2D(pool_size=(2,2), strides=(2,2)))
self.add(Flatten())
self.add(Dense(4096, activation='relu'))
self.add(Dropout(0.5))
self.add(Dense(4096, activation='relu'))
self.add(Dropout(0.5))
self.add(Dense(1000, activation='softmax'))
self.compile(optimizer=tf.keras.optimizers.Adam(0.003),
loss='categorical_crossentropy',
metrics=['accuracy'])
Amateur data scientist & student