용어정리
- Model: dynamics과 reward의 수학적 모델
- Policy: 주어진 state에서 action을 결정하는 함수
- Value function: 특정 policy를 따를 때 state 및 / 또는 action으로 인한 향후 보상
Given a model of the world
- Markov Processes
- Markov Reward Processes (MRPs)
- Markov Decision Processes (MDPs)
- Evaluation and Control in MDPs
복습 - Markov Property란?
- t: timestamp에 대해 다음이 성립한다.
- 미래의 state는 과거의 주어진 state에 independent하다
Markov Process or Markov Chain
- Markov process는 random state의 sequence로 볼 수 있다
- 물론 각 state의 전환마다 markov의 속성(State s is markov)을 만족한다
- Markov Chain의 timestamp 개념이 추가된 것이 markov process이다.
Markov process의 정의
- S는 state s의 집합이다
- P는 dynamic/transition model이고 를 나타낸다.
- Note:아직 여기서 reward, action model는 추가되지 않았다
- S의 크기가 N이면, P는 다음과 같은 matrix로 나타낼 수 있다
- P는 state s에서 state s'으로 전환될 수 있는 확률을 나타낸다.
예시
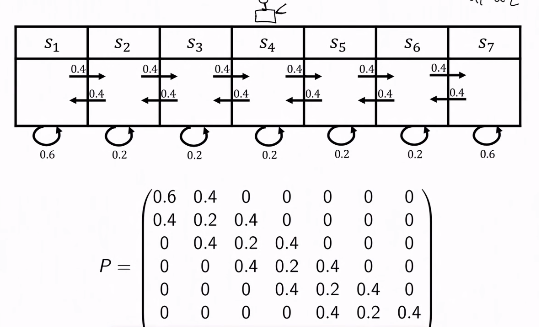
- mars rover는 1번 state부터 7번 state까지 존재하는데, 각 state에서 자기 자신 혹은 인접한 state로만 전환될 수 있다고 가정하면 P는 그림의 것과 같다.
- state의 sequence는 4, 5, 6, 7, 7, 7, ... 과 같이 나타낼 수 있다.
- 만약 mars rover가 첫번째 state일때, 다음 timestamp의 state는 다음과 같이 계산할 수 있다
Markov Reward Process(MRP)
- Markov Reward Process는 Markov Chain에 reward 개념을 추가한 것이다.
MRP의 정의
- S는 state s의 집합이다
- P는 dynamic/transition model이고 를 나타낸다.
- R은 reward function이다.
- state s에서 받을 수 있는 reward의 평균값!
- Discount factor
- 여기서 action은 고려하지 않는다. 아직 action에 의해 reward function이 정의되지 않았다.
예시
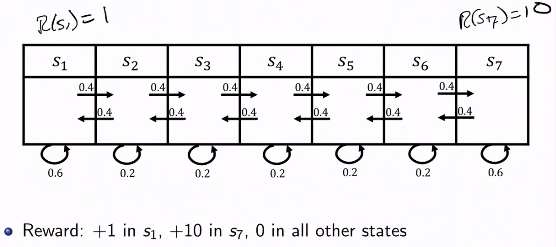
- 1번과 7번 state에 대해서 1과 10의 reward를 정의했다
Return & Value Function
Horizon의 정의
- agent가 얼마나 많은 시간동안 활동할 것인가?를 나타낸다.
- timestamp의 범위는 유한하거나 무한하다.
- timestamp가 유한한경우, finite Markov reward process라 한다.
Return의 정의 (MRP에 한해서)
- discounted sum of rewards from time stemp t to horizon
- return 값은 현재의 timestamp뿐만 아니라, 미래의 timestamp의 return 값도 신경쓴다.
State Value Function의 정의 (MRP에 한해서)
- state s에 대해 받을 수 있는 return 값의 기대값
예시 - gamma
- : 현재의 reward만 중요성을 지닌다.
- : 미래의 reward가 현재의 reward와 동일한 중요성을 지닌다.
- 만약 episode length가 finite이면 을 사용할 수 있다.
- infinite이면 무한하게 발산하기 때문에 사용 불가능
예시 - mars rover
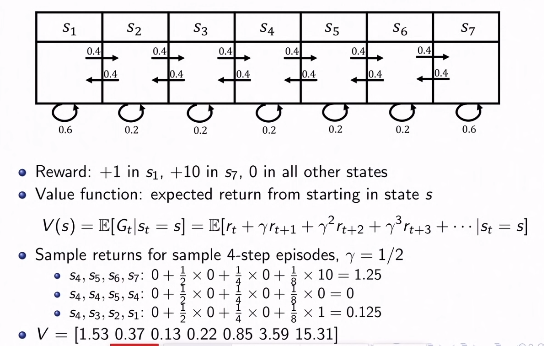
- 주어진 sequence에 대해 return 값을 계산해볼 수 있다.
- 이를 확장해서 각 state에 대한 return 값의 기대값을 나타내는 V를 계산할 수 있을까?
Computing the value of Markov Reward Process
- V가 수렴이 되었다고 가정하면 다음과 같이 유도할 수 있다.
- s에서 오는 즉각적인 보상과 -
- s'에서 오는 미래의 보상으로 구성되어있다 -
- 위의 식을 모든 s에 대해 계산한 후, matrix notation으로 표기하면 다음과 같다
- 위 공식에서는 inversion이 가능하다는 보장이 있어야 한다.
- 위 방식처럼 계산시, matrix inversion을 해야하기에 시간복잡도로 N^3이다.
Iterative Algorithm for Computing Value of MRP
-
수렴되기 전 V는 다음의 알고리즘으로 수렴시킬 수 있다.
-
Dynamic programming이 이용된다.
-
V의 모든 원소를 0으로 initialize로 한다.
-
For k = 1 until convergence
-
For all s in S
-
Markov Decision Process
- 앞의 markov reward process에 action의 개념을 추가한다
MDP의 정의
- S는 state s의 집합이다
- A는 action a의 집합이다.
- P는 dynamic/transition model이고 를 나타낸다.
- R은 reward function이다.
- Discount factor
- MDP를 tuple로 나타내면
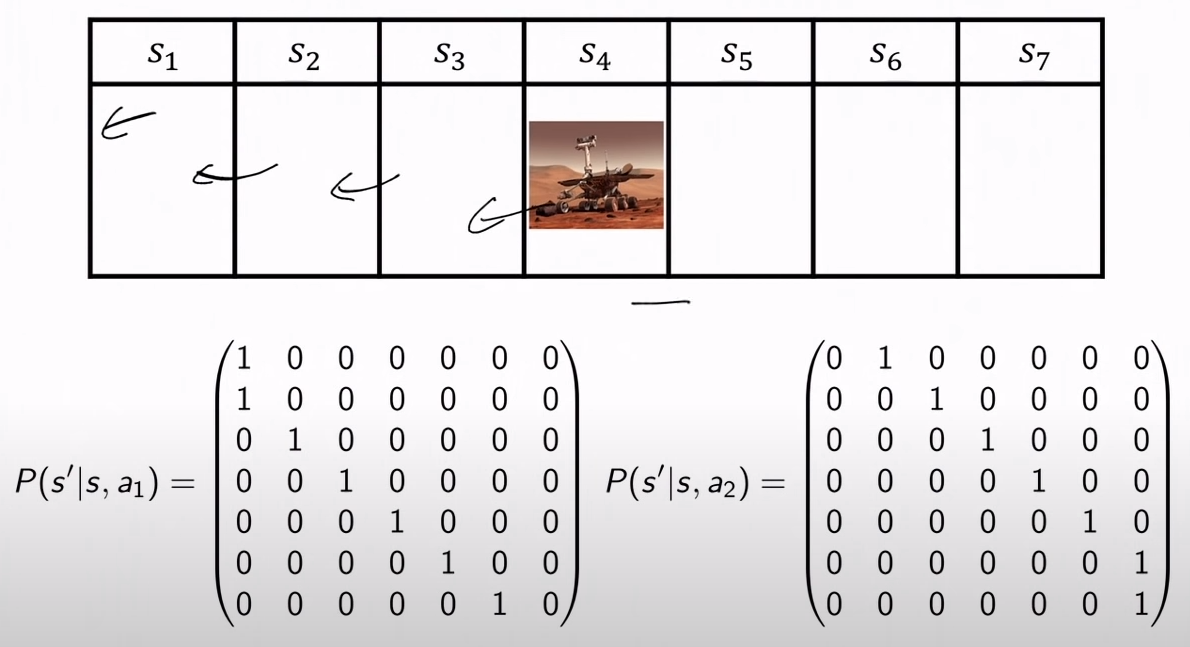
예시
state에서 왼쪽으로 가는 행위를 a_1, 오른쪽으로 가는 행위를 a_2라 하면 다음과 같이 나타난다.
MDP Policies
- policy라는 말 그대로 각 state에서 어떤 action을 취하는지에 대한 것이다.
- policy는 determinitstic일수도, stochastic일수도 있다.
MDP + Policy
- MDP + = MRP와 같다.
- 로 나타내고, R과 P는 다음과 같다.
- Rπ 및 Pπ로 MRP를 정의하면, 앞서 MRP에서 사용되던 동일한 수식을 사용하여 MDP에 대한 정책 값을 평가할 수 있다.
MDP Policy Evaluation, Iterative Algorithm
-
value function을 구하는 알고리즘에 policy 개념을 적용하면 다음과 같다.
-
V의 모든 요소를 0으로 초기화한다
-
For k = 1 until convergence(수렴)
-
For all s in S
-
-
Bellman backup이라 불리기도 한다.
MDP Control
- policy를 학습하는 내용은 아직이다
- optimal policy가 무엇인지를 결정해야한다. 이는
- 만약 optimal value function이 유일하게 존재한다면,
- MDP의 optimal policy와 infinite horizon finite state MDP 문제는 결정적이다.
- 이들은 결정적이고
- Stationary하다: 어느 timestamp든 이에 구애받지 않는다
- (infinite horizon이기 때문!)
- 그러나, optimal policy는 유일하지 않을 수 있다(같은 policy가 max 값의 value를 지닐 수 있기 때문)
- 그래서 이 optimal policy를 어떻게 찾을것인가?
Policy Search
- 가장 optimal policy를 찾아야 하는데, deterministic policy는 총 가지가 가능하다 (각 state마다 action을 정해야 하므로)
- 보통 가능한 모든 policy에 대해 계산 후 결정하는것보다 policy iteration이라는 기법을 사용하면 효율적으로 optimal policy를 찾을 수 있다
- 그래서 policy iteration이 무엇인가?
MDP Policy Iteration
policy iteration은 다음의 알고리즘을 따른다.
- i = 0로 초기화
- 각 state에 대해 를 무작위로 초기화한다
- while (policy가 개선됬는지 알아보기 위해 L1-norm을 사용한다)
- (policy가 개선되지 않을때까지 policy를 개선한다)
- ←MDP V function policy evaluation of
- ←Policy improvement
- i = i+1
이 알고리즘에서 두가지 의문이 생긴다.
- 요약하면 policy가 좋아질때까지 iteration을 돌린다는건데, 과연 이 iteration을 통해 optimal policy에 도달할 수 있을까?
- iteration을 통해 오히려 안좋아질수도 있는거 아닌가?
State-Action value Q
- policy 가 좋은지, 안 좋은지를 파악하기 위해 수치화된 값이 필요한데, 이곳에 이용되는 값이 바로 State-Action value (Q로 표기)이다.
- state s에서, action a를 한 다음, policy 를 따를때 그 value가 얼마나 될 것인가를 나타낸다
Policy Improvement
각 iteration마다 Q를 이용한 policy improvement는 다음과 같다.
-
모든 S의 원소 s, A의 원소 a에 대해 Q를 계산한다.
-
새로운 policy에서 state s에 대한 action a는 다음과 같이 결정한다. (가장 큰 Q 값을 가지는 s, a 쌍을 설정)
여기서 우리는 policy가 점차 좋아짐을 알 수 있는데, 그 이유는
새로 행하는 행동 a는 전의 policy인 와 같거나 다를텐데
- 같은 경우 Q값은 동일할 것이고
- 다른 경우 보다 좋은 행동으로 에서 선택된 경우이다.
- 따라서 가 성립한다.
Delving Deeper Into Policy Improvement Step
- 이제 이 Q function에 대해 좀더 알아보자..!
- 위의 수식에서 policy의 가치는 항상 단조증가함을 보일 ****수 있다. 증명은 다음 단락을 참고하라
- 즉, 새로운 policy는 예전의 policy보다 좋거나 같다
Monotonic Improvement in Policy
- 먼저 policy에 대한 단조증가의 정의는 다음과 같다.
- proof(참고)
Policy Iteration: check!
- 만약 policy가 바뀌지 않는다면, 여기서 바뀔 수 있는가?
- 아니다! policy가 바뀌지 않는 경우 이 되므로, iteration이 진행되지 않는다.
- policy iteration의 maximum number는?
- policy는 개 존재하는데, policy는 단조증가하고 동일한 policy는 두번 올 수 없으므로, policy의 개수만큼 iteration이 가능하다.
MDP: Computing Optimal Policy and Optimal Value
- policy iteration은 horizon이 infinite할때 (남은 timestamp가 무한대)일때 policy를 성능을 측정해가며 점차 개선해나가는 방식이고
- optimal policy를 알게 되므로 optimal value도 알게 된다.
- Value iteration은 horizon이 k일때 optimal value를 찾아가며 k를 증가시키는 형식이다.
- optimal value function을 먼저 찾고 그에 따른 optimal policy를 결정짓는다.
- 주로 state x에서 action a를 하면 state x'으로 가는 확률을 알때 사용하는데... 음.... 모르겠다..
- 이부분에 대해서는 추후 강의를 들은 후 쓸모가 있으면 수정하도록 하겠다 :(
